TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093572
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209312
出願日
2023-12-12
発明の名称
モータ制御装置
出願人
ローム株式会社
代理人
弁理士法人 佐野特許事務所
主分類
H02P
21/34 20160101AFI20250617BHJP(電力の発電,変換,配電)
要約
【課題】位置センサレスモード移行時における切替ショックを軽減する。
【解決手段】モータ制御装置(3)に設けられた制御回路(100)は、永久磁石同期モータに設けられた回転子の回転に同期する回転軸と回転軸の推定軸との軸誤差を導出する軸誤差導出部(112)と、軸誤差と軸誤差指令値との差分又は軸誤差を入力誤差として用いて回転子の回転速度を推定する速度推定部(114)と、を有する。制御回路は、軸誤差に依らず速度指令値に従い回転子の回転速度を増大させる同期運転モードを経て、推定回転速度に基づきモータを駆動する位置センサレスモードに移行する。制御回路は、同期運転び位置センサレスモードの夫々において軸誤差の導出を行い、同期運転モードから位置センサレスモードへの移行直前における軸誤差及び速度指令値に基づき、位置センサレスモードにおける速度推定部の初期パラメータを設定する。
【選択図】図4
特許請求の範囲
【請求項1】
永久磁石同期モータに設けられた回転子の回転に同期する回転軸と前記回転軸の推定軸との軸誤差を導出するよう構成された軸誤差導出部と、前記軸誤差と軸誤差指令値との差分又は前記軸誤差を入力誤差として用いて前記回転子の回転速度を推定するよう構成された速度推定部と、を有する制御回路を備え、
前記制御回路は、前記軸誤差に依らず速度指令値に従い前記回転子の回転速度を増大させる同期運転モードを経て、前記速度推定部による推定回転速度に基づき前記モータを駆動する位置センサレスモードに移行し、
前記制御回路は、前記同期運転モード及び前記位置センサレスモードの夫々において前記軸誤差の導出を行い、前記同期運転モードから前記位置センサレスモードへの移行直前における前記軸誤差及び前記速度指令値に基づき、前記位置センサレスモードにおける前記速度推定部の初期パラメータを設定する
、モータ制御装置。
続きを表示(約 1,800 文字)
【請求項2】
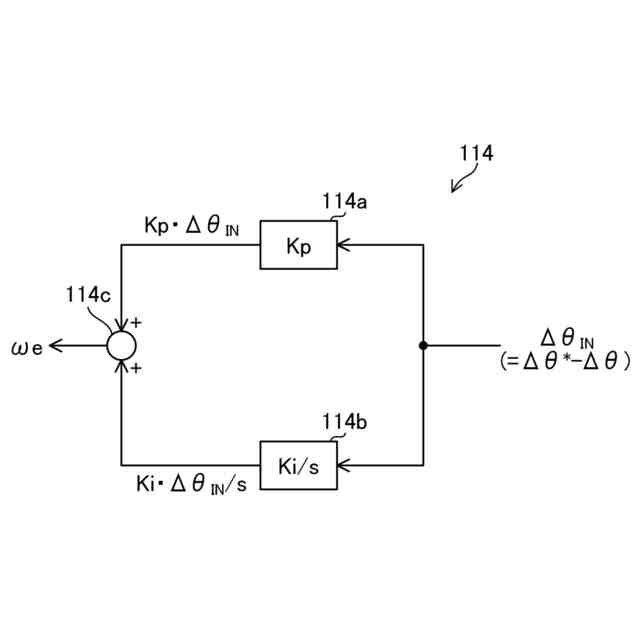
前記速度推定部は、前記位置センサレスモードにおいて、前記入力誤差に比例する比例項及び前記入力誤差の積分による積分項の導出を通じて前記推定回転速度を導出し、
前記初期パラメータは、前記位置センサレスモードにおける前記積分項の積分値の初期値である
、請求項1に記載のモータ制御装置。
【請求項3】
前記制御回路は、第1項と第2項の和が前記同期運転モードから前記位置センサレスモードへの移行直前における前記速度指令値と等しくなるよう仮想積分値を求め、
前記第1項は、前記同期運転モードから前記位置センサレスモードへの移行直前における前記入力誤差に対して比例ゲインを乗じて得た項であり、
前記第2項は、前記同期運転モードから前記位置センサレスモードへの移行直前における前記入力誤差と前記仮想積分値との和に対し積分ゲインを乗じて得た項であり、
前記初期値は、前記同期運転モードから前記位置センサレスモードへの移行直後における前記積分項の積分値であり、
前記制御回路は、前記初期値に対して、前記同期運転モードから前記位置センサレスモードへの移行直前における前記入力誤差と前記仮想積分値との和を設定する
、請求項2に記載のモータ制御装置。
【請求項4】
前記位置センサレスモードにおける各制御周期において前記軸誤差導出部及び前記速度推定部により前記軸誤差及び前記推定回転速度が導出され、
前記速度推定部は、前記位置センサレスモードにおける特定制御周期において、前記特定制御周期の前記入力誤差に前記比例ゲインを乗じることにより前記特定制御周期の前記比例項を導出し、前記位置センサレスモードにおける前記特定制御周期までの前記入力誤差を前記初期値に累積加算することで得た値に対し前記積分ゲインを乗じることにより前記特定制御周期の前記積分項を導出し、前記特定制御周期の前記比例項と前記特定制御周期の前記積分項との和を求めることで前記特定制御周期の前記推定回転速度を導出する
、請求項3に記載のモータ制御装置。
【請求項5】
前記同期運転モードにおいて、前記制御回路は、前記速度指令値を徐々に増加させ、前記軸誤差に依らず前記速度指令値に従って前記回転子の回転速度が増大するよう前記永久磁石同期モータを制御し、
前記位置センサレスモードにおいて、前記制御回路は、前記推定回転速度が前記速度指令値に追従するよう且つ前記軸誤差が前記軸誤差指令値又はゼロに収束するよう前記永久磁石同期モータを制御する
、請求項1~4の何れかに記載のモータ制御装置。
【請求項6】
当該モータ制御装置は、直流電力から交流電力を生成して前記永久磁石同期モータに供給するよう構成されたインバータと、前記インバータから前記モータへの出力電流又は前記直流電力を前記インバータに供給する直流電源と前記インバータとの間に流れる母線電流を検出するよう構成された電流センサと、に接続され、
前記同期運転モードにおいて、前記制御回路は、前記電流センサの検出結果と前記速度指令値に基づき前記インバータを駆動することで前記永久磁石同期モータを制御し、
前記位置センサレスモードにおいて、前記制御回路は、前記電流センサの検出結果と前記推定回転速度と前記速度指令値に基づき前記インバータを駆動することで前記永久磁石同期モータを制御する
、請求項5に記載のモータ制御装置。
【請求項7】
前記制御回路は、前記永久磁石同期モータにおける特定相の電機子巻線に電流を供給することで前記回転子の位置を固定した後、前記同期運転モードに移行し、前記同期運転モードにて前記速度指令値が基準速度指令値に達すると、前記位置センサレスモードに移行する
、請求項1~4の何れかに記載のモータ制御装置。
【請求項8】
前記制御回路は、前記制御回路が前記位置センサレスモードにて動作する期間の全部において前記軸誤差の導出を行い、且つ、前記制御回路が前記同期運転モードにて動作する期間の少なくとも一部において前記軸誤差の導出を行う
、請求項1~4の何れかに記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータ制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
永久磁石同期モータに対するベクトル制御の内、回転子位置検出用の位置センサを用いることなく行われるベクトル制御は、位置センサレスベクトル制御などと称される。位置センサレスベクトル制御を実行するには、必要な誘起電圧が発生するまでモータの回転速度を上げる必要がある。そこで、一般的には、必要な誘起電圧が発生するまでオープンループで回転速度を上げてゆき、その後に位置センサレスベクトル制御を実現するモードへと移行させることが多い。
【先行技術文献】
【特許文献】
【0003】
特開2010-206874号公報
【0004】
[概要]
オープンループで回転速度を上げてゆくモードから位置センサレスベクトル制御を実現するモードへと移行させる際、いわゆる切替ショックと呼ばれる現象が発生することがある。切替ショックは急激な速度又は電流変動をもたらし、静音性等に悪影響を与える。切替ショックの抑制技術が求められる。
【0005】
本開示の一態様に係るモータ制御装置は、永久磁石同期モータに設けられた回転子の回転に同期する回転軸と前記回転軸の推定軸との軸誤差を導出するよう構成された軸誤差導出部と、前記軸誤差と軸誤差指令値との差分又は前記軸誤差を入力誤差として用いて前記回転子の回転速度を推定するよう構成された速度推定部と、を有する制御回路を備え、前記制御回路は、前記軸誤差に依らず速度指令値に従い前記回転子の回転速度を増大させる同期運転モードを経て、前記速度推定部による推定回転速度に基づき前記モータを駆動する位置センサレスモードに移行し、前記制御回路は、前記同期運転モード及び前記位置センサレスモードの夫々において前記軸誤差の導出を行い、前記同期運転モードから前記位置センサレスモードへの移行直前における前記軸誤差及び前記速度指令値に基づき、前記位置センサレスモードにおける前記速度推定部の初期パラメータを設定する。
【図面の簡単な説明】
【0006】
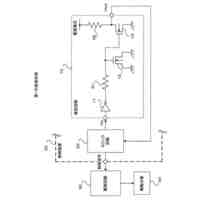
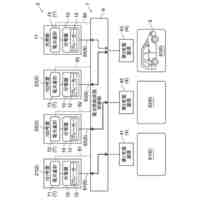
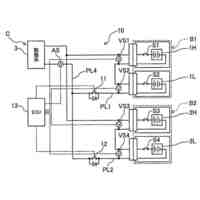
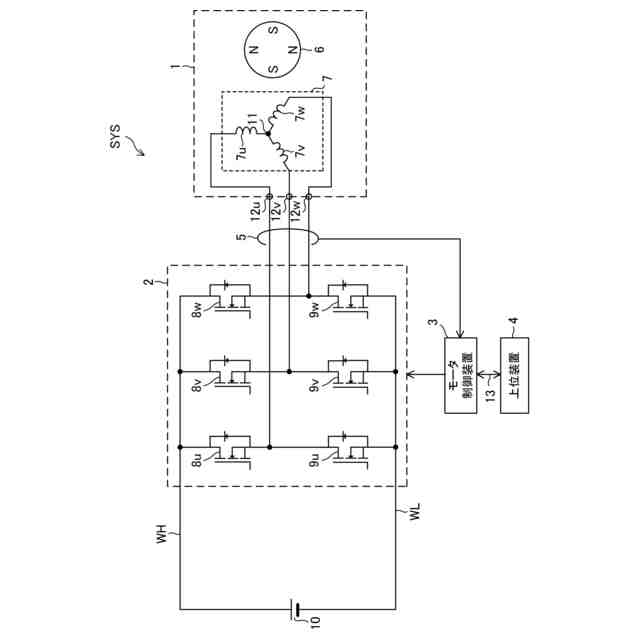
図1は、本開示の実施形態に係るモータ駆動システムの全体構成図である。
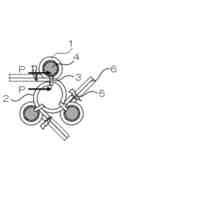
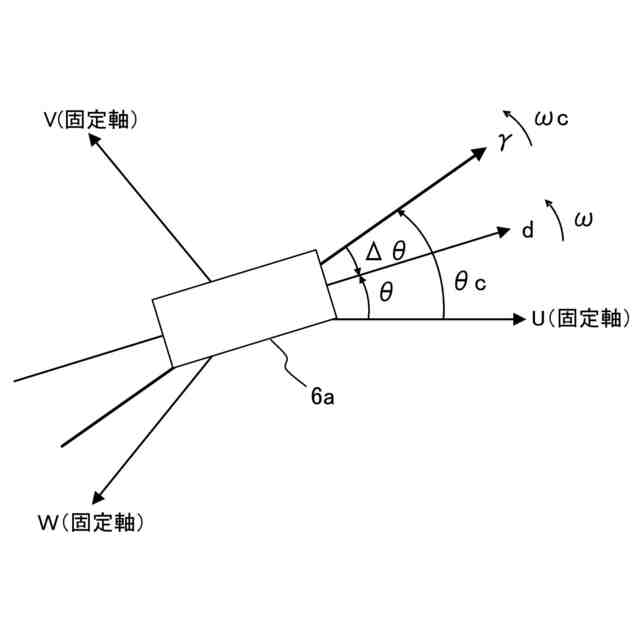
図2は、本開示の実施形態に係るモータの解析モデル図である。
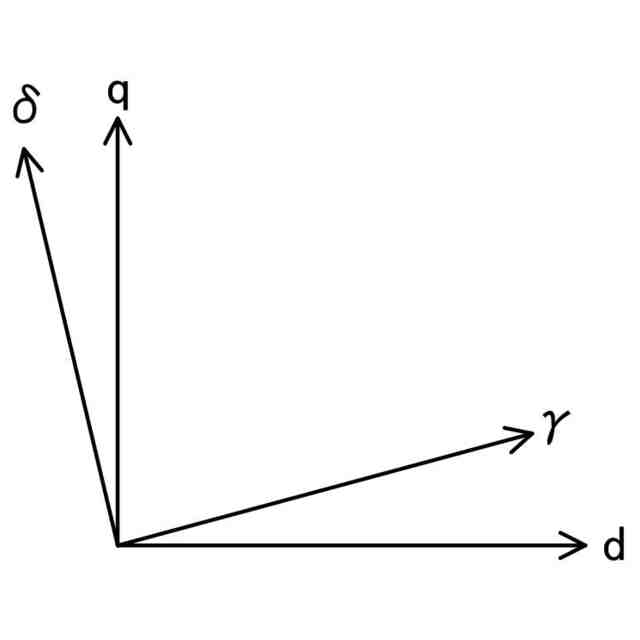
図3は、本開示の実施形態に係るモータの解析モデル図である。
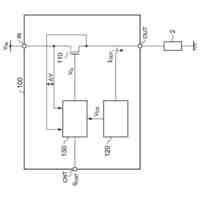
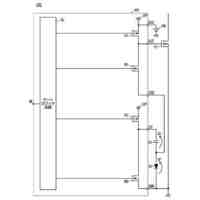
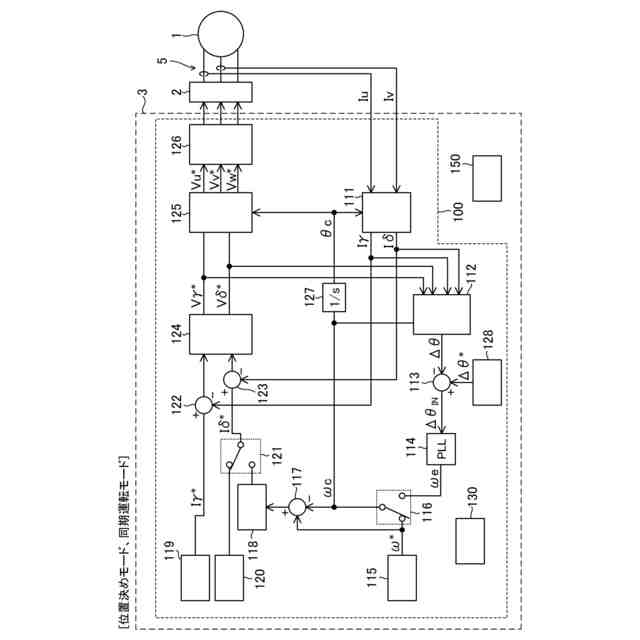
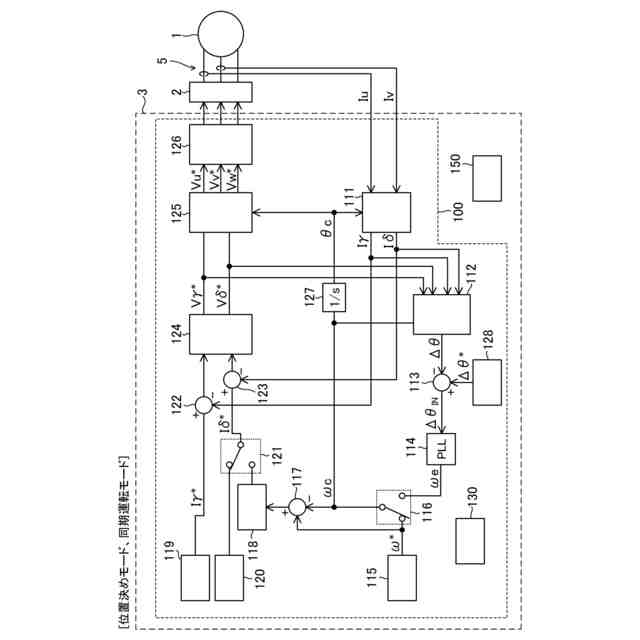
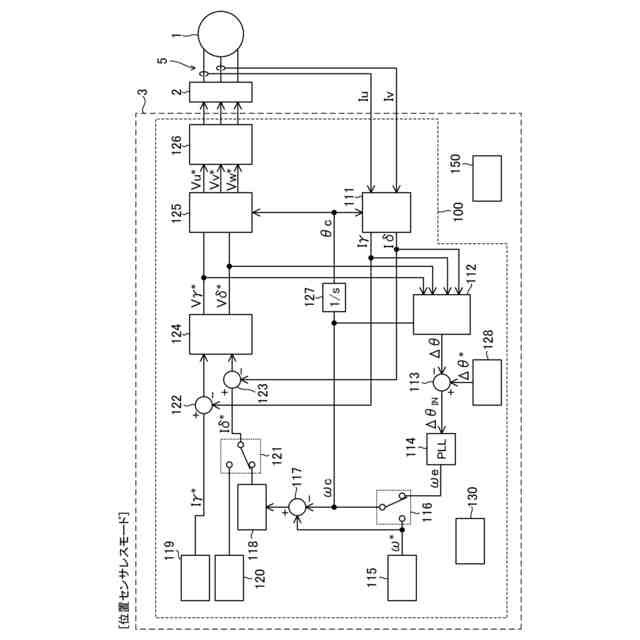
図4は、本開示の実施形態に係るモータ制御装置の内部構成及び周辺構成を示す図である(位置決めモード及び同期運転モード)。
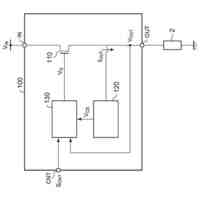
図5は、本開示の実施形態に係るモータ制御装置の内部構成及び周辺構成を示す図である(位置センサレスモード)。
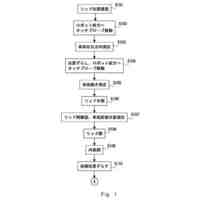
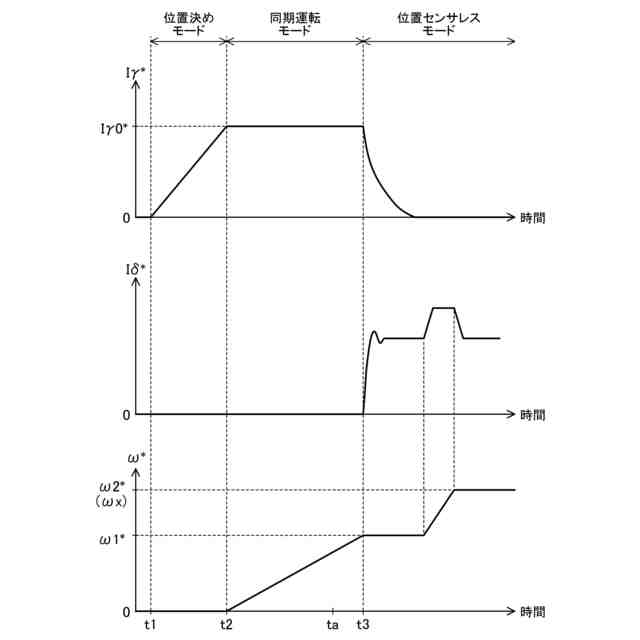
図6は、本開示の実施形態に係り、モータを起動させる際の制御モードの遷移図である。
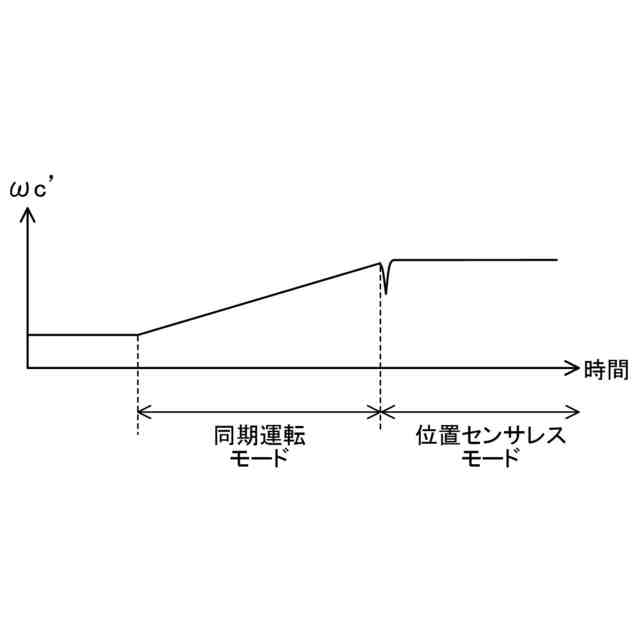
図7は、仮想モータ制御装置を用いた場合における、起動時の回転速度の概略波形図である。
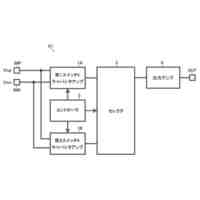
図8は、本開示の実施形態に係り、PLL制御部の内部構成図である。
図9は、本開示の実施形態に係り、複数の制御周期における幾つかの指令値及び状態量を示す図である。
図10は、本実施形態のモータ制御装置を用いた場合における、起動時の回転速度の概略波形図である。
図11は、本開示の実施形態に係るモータ駆動システムの変形全体構成図である。
【0007】
[詳細な説明]
以下、本開示の実施形態の例を、図面を参照して具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。尚、本明細書では、記述の簡略化上、情報、信号、物理量、機能部、回路、素子又は部品等を参照する記号又は符号を記すことによって、該記号又は符号に対応する情報、信号、物理量、機能部、回路、素子又は部品等の名称を省略又は略記することがある。例えば、後述の記号Vγ
*
によって参照されるγ軸電圧指令値は(図3参照)、γ軸電圧指令値Vγ
*
と表記されることもあるし、電圧指令値Vγ
*
又は指令値Vγ
*
と略記されることもあり得るが、それらは全て同じものを指す。また、本明細書において、任意の回路素子、配線、ノードなど、回路を形成する複数の部位間についての接続とは、特に記述なき限り、電気的な接続を指すと解して良い。
【0008】
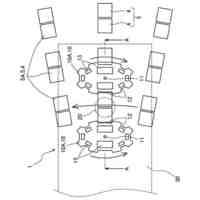
図1は本発明の実施形態に係るモータ駆動システムSYSの概略ブロック図である。図1のモータ駆動システムSYSは、モータ1と、PWMインバータであるインバータ2と、モータ制御装置3と、上位装置4と、電流センサ5と、を備える。PWMは“Pulse Width Modulation”の略称である。インバータ2に対して直流電源10が接続される。直流電源10は配線WL及びWHに接続される。直流電源10は配線WLの電位を基準に配線WHに対し正の直流電圧を出力する。
【0009】
モータ1は、三相永久磁石同期モータであり、永久磁石が設けられた回転子6と、U相、V相及びW相の電機子巻線7u、7v及び7wが設けられた固定子7と、を備える。モータ1は、埋込磁石同期モータであっても良いし、表面磁石同期モータであっても良い。電機子巻線7u、7v及び7wは中性点11を中心にY結線される。電機子巻線7u、7v及び7wにおいて、中性点11の反対側の非結線端は、夫々、端子12u、12v及び12wに接続される。即ち、電機子巻線7u、7v及び7wの各一端は中性点11にて共通接続され、電機子巻線7u、7v及び7wの他端は、夫々、端子12u、12v及び12wに接続される。
【0010】
インバータ2は、U相、V相及びW相用のハーフブリッジ回路を備える電力変換器である。各ハーフブリッジ回路は、一対のスイッチング素子を有する。各ハーフブリッジ回路において、一対のスイッチング素子は配線WH及びWL間に直列接続され、各ハーフブリッジ回路に直流電源10から出力される直流電圧が印加される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
半導体スイッチ
1日前
ローム株式会社
半導体スイッチ
1日前
ローム株式会社
アンプ及びモータ装置
1日前
ローム株式会社
半導体素子および光学センサ
1日前
ローム株式会社
容量性素子およびその製造方法
1日前
ローム株式会社
遅延回路、制御装置及び駆動システム
1日前
ローム株式会社
窒化物半導体装置および窒化物半導体装置の製造方法
2日前
ローム株式会社
検知回路、半導体集積回路装置、検知システム、及び車両
1日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
1日前
個人
恒久電源開発の装置
1日前
個人
太陽光発電システム
10日前
トヨタ自動車株式会社
充電装置
3日前
北勢工業株式会社
保護管
8日前
ダイハツ工業株式会社
溶接装置
1日前
愛知電機株式会社
ステータおよびモータ
1日前
ダイハツ工業株式会社
ロータ構造
8日前
株式会社ダイヘン
充電装置
8日前
愛知電機株式会社
ステータおよびモータ
1日前
愛知電機株式会社
ステータおよびモータ
1日前
株式会社デンソー
電気装置
10日前
株式会社セイワ
車両用配線カバー
21日前
サンデン株式会社
モータ制御装置
1日前
因幡電機産業株式会社
充電システム
1日前
住友電装株式会社
電気接続箱
8日前
住友電装株式会社
電気接続箱
8日前
個人
バネとクラッチを用いた波浪発電装置
10日前
株式会社ダイヘン
電力システム
8日前
キヤノン株式会社
画像形成装置
8日前
株式会社豊田自動織機
回転電機
17日前
富士電機株式会社
リニアモータ
21日前
矢崎総業株式会社
電池切替装置
3日前
三菱電機株式会社
ゲート駆動装置
8日前
三菱電機株式会社
束線器具
4日前
スズキ株式会社
車両用モータ構造
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ