TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094591
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210243
出願日
2023-12-13
発明の名称
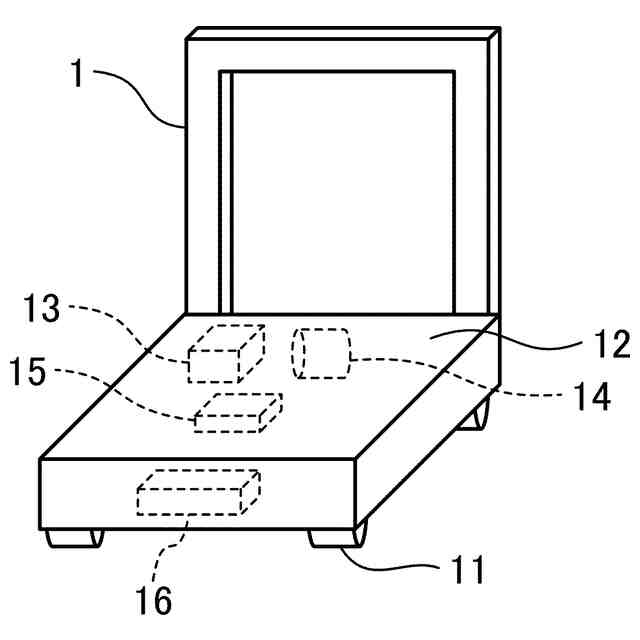
提供装置、搬送ロボット、及び物品搬送システム
出願人
株式会社デンソーテン
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/667 20240101AFI20250618BHJP(制御;調整)
要約
【課題】搬送対象物品全体の特性に応じた方法で搬送を行うこと。
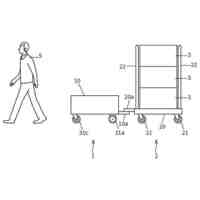
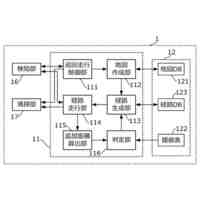
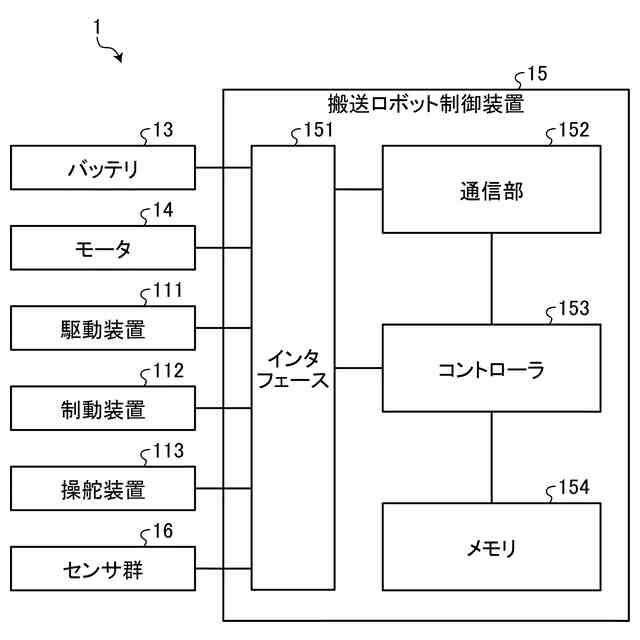
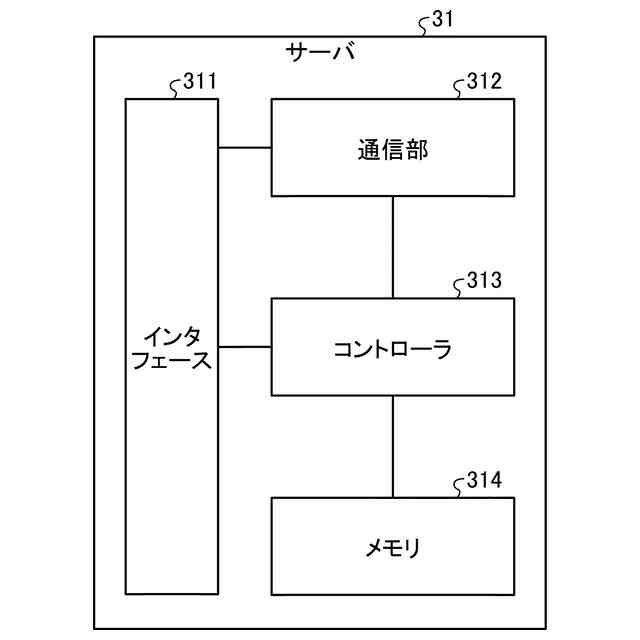
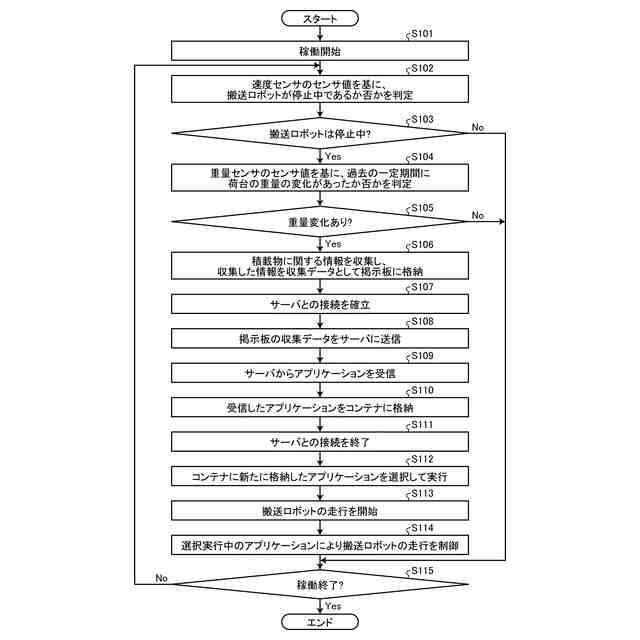
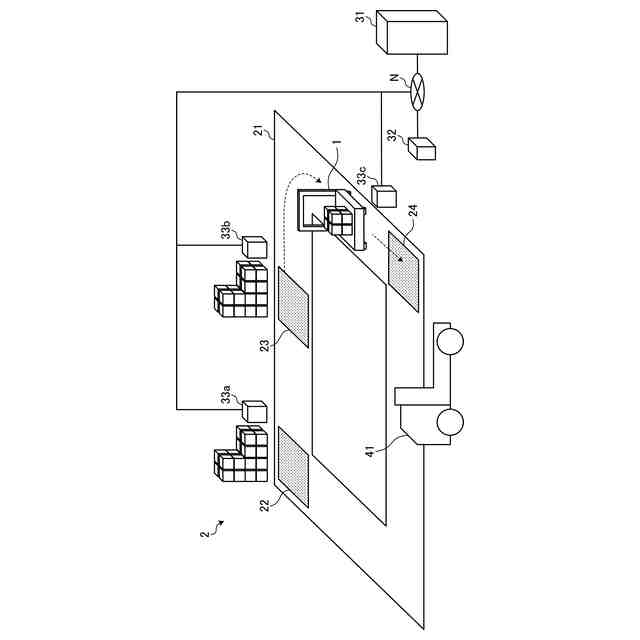
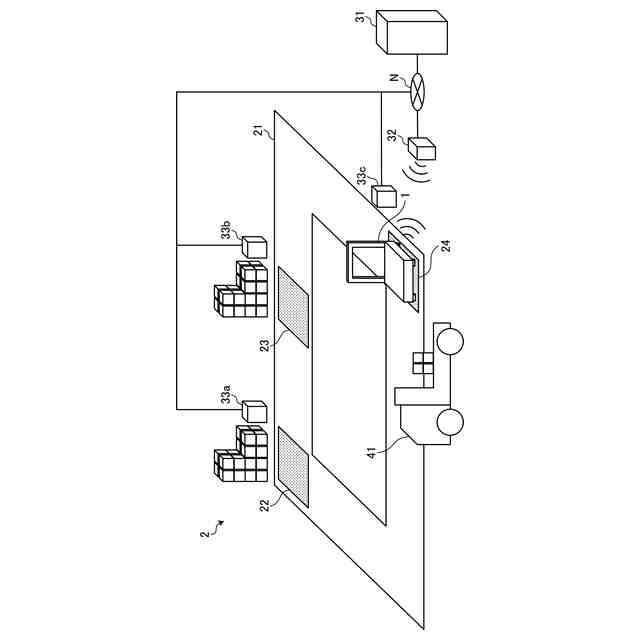
【解決手段】システムは、物品を搬送する搬送ロボットと、搬送ロボットにアプリケーションを提供する提供装置と、を有する。搬送ロボットは、積載された全物品に関する情報を提供装置に送信し、物品に関する情報に基づく物品全体の特性に応じたアプリケーションを提供装置から受信し、受信したアプリケーションにより、走行制御を行う。提供装置は、搬送ロボットに積載された全物品に関する情報に基づく物品全体の特性に応じたアプリケーションを、複数のアプリケーションの中から選択し、選択したアプリケーションを搬送ロボットに送信する。
【選択図】図6
特許請求の範囲
【請求項1】
アプリケーションを提供する提供装置であって、コントローラを備え、
前記コントローラは、
搬送ロボットの走行を制御するアプリケーションであって、前記搬送ロボットに積載された物品全体の特性に応じたアプリケーションを、複数のアプリケーションの中から選択し、
選択した前記アプリケーションを前記搬送ロボットに送信する
提供装置。
続きを表示(約 1,600 文字)
【請求項2】
前記コントローラは、
前記搬送ロボットへの物品の積み込み、又は前記搬送ロボットからの物品の荷下ろしが行われる場所に設置されたセンサによって検出されたデータに基づき、前記搬送ロボットに積載された物品全体の特性を判定し、
判定した前記特性に応じたアプリケーションを、複数のアプリケーションの中から選択する
請求項1に記載の提供装置。
【請求項3】
前記コントローラは、
前記搬送ロボットに積載された物品全体の特性、及び前記搬送ロボットの特性の両方に応じたアプリケーションを選択する
請求項1に記載の提供装置。
【請求項4】
前記コントローラは、前記搬送ロボットが物品の積み込み、又は物品の荷下ろしが行われる場所で移動停止している際に、選択した前記アプリケーションを前記搬送ロボットに送信する
請求項1に記載の提供装置。
【請求項5】
物品を搬送する搬送ロボットであって、
コントローラを備え、
前記コントローラは、
前記搬送ロボットの移動が停止しているときに、積載された全物品に関する情報を提供装置に送信し、
送信した前記物品に関する情報に対応するアプリケーションを前記提供装置から受信し、
受信した前記アプリケーションにより前記搬送ロボットの走行制御を行う、
搬送ロボット。
【請求項6】
前記コントローラは、
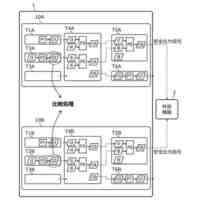
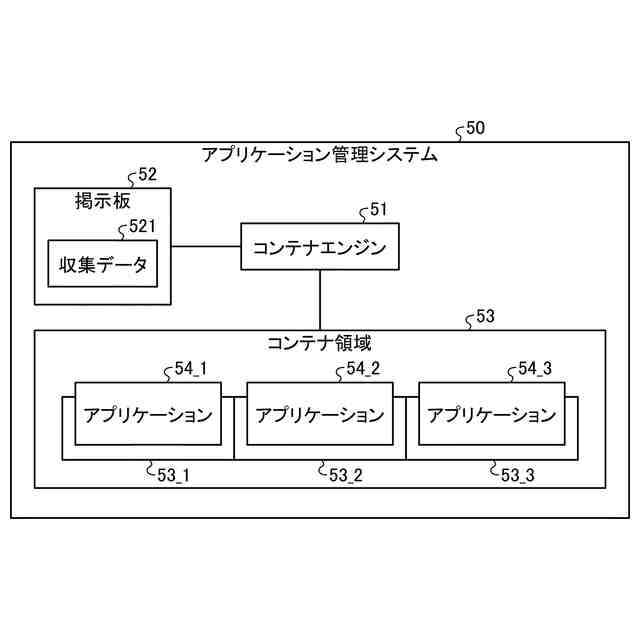
記憶領域に構築されたコンテナに前記アプリケーションを格納し、前記物品に関する情報及び前記アプリケーションの実行によって生成されたデータを、記憶領域に各アプリケーションが共用可能に構築された掲示板に格納する
請求項5に記載の搬送ロボット。
【請求項7】
前記コントローラは、
入力された物品の搬送を指示する命令に含まれる情報を、前記物品に関する情報として前記提供装置に送信する
請求項5に記載の搬送ロボット。
【請求項8】
搭載される前記物品の情報を検出するセンサをさらに備え、
前記コントローラは、
前記センサによって取得されたデータに基づき、前記搬送ロボットに積載された全物品の情報を生成する
請求項5または6に記載の搬送ロボット。
【請求項9】
前記コントローラは、
前記搬送ロボットへの物品の積み込み、又は前記搬送ロボットからの物品の荷下ろしが行われる場所に設置されたセンサによって検出されたデータに基づき、前記搬送ロボットに積載された全物品の情報を生成する
請求項5または6に記載の搬送ロボット。
【請求項10】
物品を搬送する搬送ロボットと、前記搬送ロボットにアプリケーションを提供する提供装置と、を有する物品搬送システムであって、
前記搬送ロボットは、
第1のコントローラを備え、
前記第1のコントローラは、
前記搬送ロボットに積載された全物品に関する情報を前記提供装置に送信し、
前記全物品に関する情報に基づく積載物品全体の特性に応じたアプリケーションを前記提供装置から受信し、
受信した前記アプリケーションにより、前記搬送ロボットの走行制御を行い、
前記提供装置は、第2のコントローラを備え、
前記第2のコントローラは、
前記搬送ロボットから前記搬送ロボットに搭載された前記全物品に関する情報を受信し、
前記搬送ロボットの走行を制御するアプリケーションであって、前記搬送ロボットに積載された前記全物品に関する情報に基づく物品全体の特性に応じたアプリケーションを、複数のアプリケーションの中から選択し、
選択した前記アプリケーションを前記搬送ロボットに送信する
物品搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、提供装置、搬送ロボット、及び物品搬送システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、自律走行搬送ロボット(AMR:Autonomous Mobile Robot)が導入されている。AMRは、搬送対象物品の情報、搬送対象物品の搬送元の場所及び搬送先の場所のデータに基づき搬送ルートを決定し、搬送動作を行う。例えば、AMRは、工場における部品の搬送、及び飲食店における食品の搬送等を行う。
【0003】
また、搬送ロボットによって搬送されるトレイに収容された物品が搬送中にこぼれ落ちることを防止するために、搬送ロボットの加速度が閾値を超えた場合に警告情報を出力する技術が知られている(例えば、特許文献1を参照)。
【0004】
また、引用文献1には、搬送対象物品ごとに振動に対する耐性により分類されたクラスに応じた速度で搬送ロボットが搬送動作を行うことが記載されている。すなわち、引用文献1には、搬送対象物品の特性に応じた搬送動作を行うことが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-103767号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の技術では、搬送対象物品全体の特性に応じた方法で搬送を行うことができない場合がある。
【0007】
例えば、1つの物品が積載されている場合と、物品が重ね積みされている場合とでは、適した搬送動作の方法が異なると考えられる。そのため、引用文献1に記載の方法のように、振動に対する耐性という1つの特性だけでは物品の種類、積載状態等の物品全体の特性に応じた搬送動作を特定できるとは限らない。
【0008】
本発明は、上記に鑑みてなされたものであって、搬送対象物品全体の特性に応じた方法で搬送を行うことができる提供装置、搬送ロボット、及び物品搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る提供装置は、アプリケーションを提供する提供装置であって、コントローラを備える。コントローラは、搬送ロボットの走行を制御するアプリケーションであって、搬送ロボットに積載された物品全体の特性に応じたアプリケーションを、複数のアプリケーションの中から選択する。コントローラは、選択したアプリケーションを搬送ロボットに送信する。
【0010】
本発明に係る搬送ロボットは、物品を搬送する搬送ロボットであって、コントローラを備える。コントローラは、搬送ロボットの移動が停止しているときに、積載された全物品に関する情報を提供装置に送信し、送信した物品に関する情報に対応するアプリケーションを提供装置から受信し、受信したアプリケーションにより搬送ロボットの走行制御を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
5日前
株式会社ダイヘン
移動体
10日前
ローム株式会社
半導体集積回路
20日前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
23日前
株式会社ダイフク
搬送設備
5日前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社鷺宮製作所
制御装置
4日前
株式会社オプトン
制御プログラム生成装置
3日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイヘン
負荷時タップ切換器
10日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
16日前
株式会社計数技研
移動体、及びプログラム
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
3日前
WHILL株式会社
電動モビリティ
1か月前
オムロン株式会社
安全装置
3日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
26日前
株式会社日立製作所
製造工程管理システム
4日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社FUJI
工作機械
6日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
20日前
株式会社豊田自動織機
無人搬送車両
13日前
株式会社大林組
作業機械の自動運転制御システム
19日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
オークラ輸送機株式会社
走行車および自律走行方法
26日前
株式会社東海理化電機製作所
ペダル装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ