TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095080
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210875
出願日
2023-12-14
発明の名称
制御プログラム生成装置
出願人
株式会社オプトン
代理人
個人
主分類
G05B
19/05 20060101AFI20250619BHJP(制御;調整)
要約
【課題】アクチュエータが他のアクチュエータに従動する動作を含んだ自動製造機械(10)の制御プログラム(400)を自動で生成する。
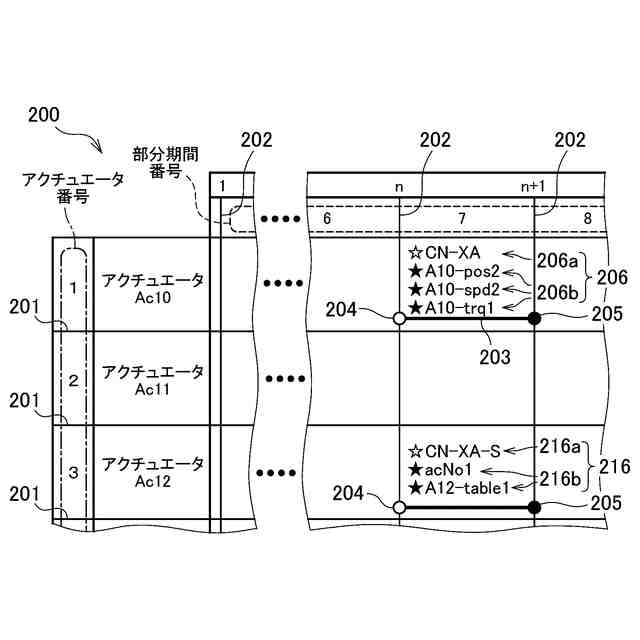
【解決手段】動作チャート(200)を読み込むと、動作チャートの部分期間に割り当てられた基本動作(206)に対応するプログラム要素(100p)を、動作チャート上での部分期間の順序に従って結合することによって制御プログラムを生成する。動作チャートの少なくとも1つの部分期間には、基本動作とその基本動作に従動する従動動作(216)とが割り当てられており、基本動作と従動動作とが割り当てられた部分期間については、従動動作を実現する従動プログラム要素(100s)も動作チャート上での部分期間の順序に従って結合する。こうすれば、アクチュエータが他のアクチュエータに従動するような動作を含む場合でも、制御プログラムを自動で生成可能となる。
【選択図】図5
特許請求の範囲
【請求項1】
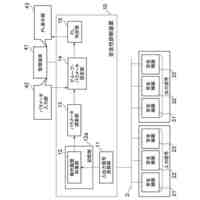
複数のアクチュエータを備えた自動製造機械(10)の制御プログラム(400)を生成する制御プログラム生成装置(110)であって、
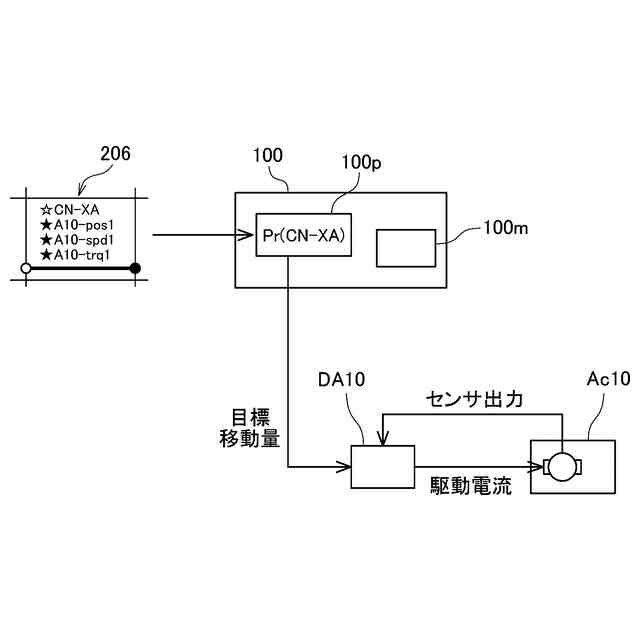
前記アクチュエータが指定された動作量で該アクチュエータの自由度方向に動作する基本動作(206)を、前記基本動作を実現するプログラム要素(100p)と対応付けて記憶している基本動作記憶部(112)と、
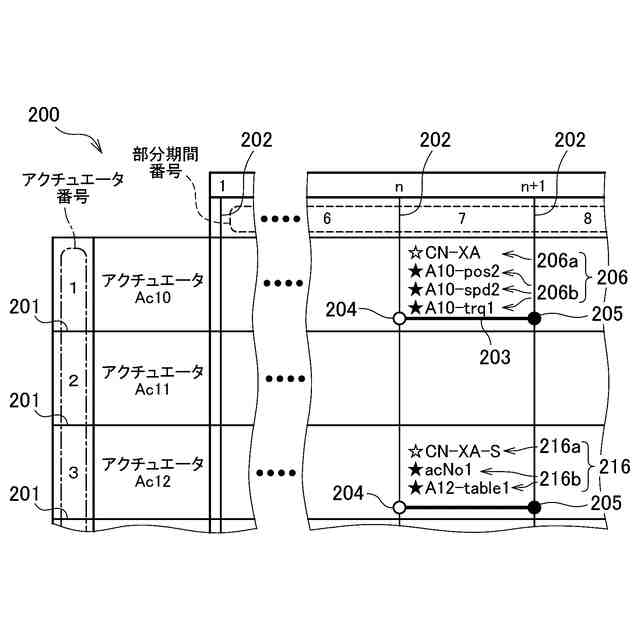
前記自動製造機械が動作を開始してから終了するまでの動作期間が複数の部分期間に分割されており、前記自動製造機械の動作が複数の前記基本動作に分解されると共に、前記基本動作が前記複数の部分期間の何れか1つの前記部分期間に割り当てられることによって前記自動製造機械の動作が記述された動作チャート(200)を読み込む動作チャート読込部(111)と、
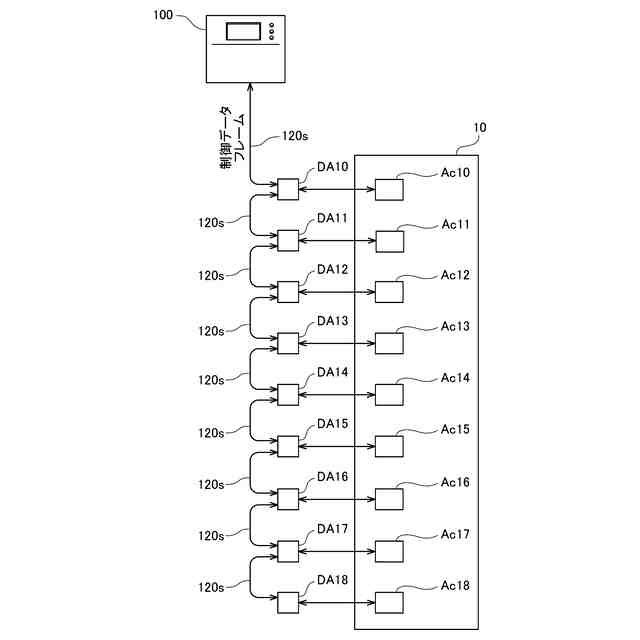
前記動作チャート上の複数の前記部分期間に割り当てられた複数の前記基本動作の前記プログラム要素を、前記動作チャート上での前記部分期間の順序に従って結合することにより、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成部(113、114)と
を備え、
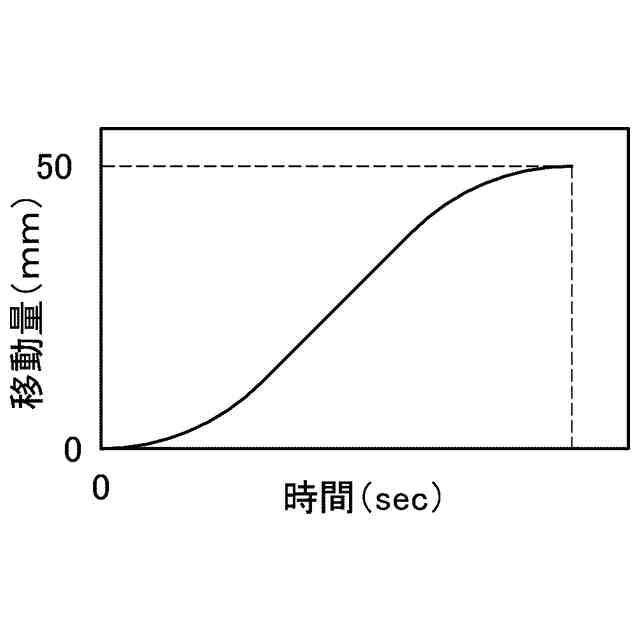
前記基本動作記憶部に記憶された前記プログラム要素は、前記アクチュエータを前記動作量で動作させるための、前記アクチュエータの移動量の時系列データを生成することによって、前記基本動作を実現しており、
前記基本動作記憶部は、
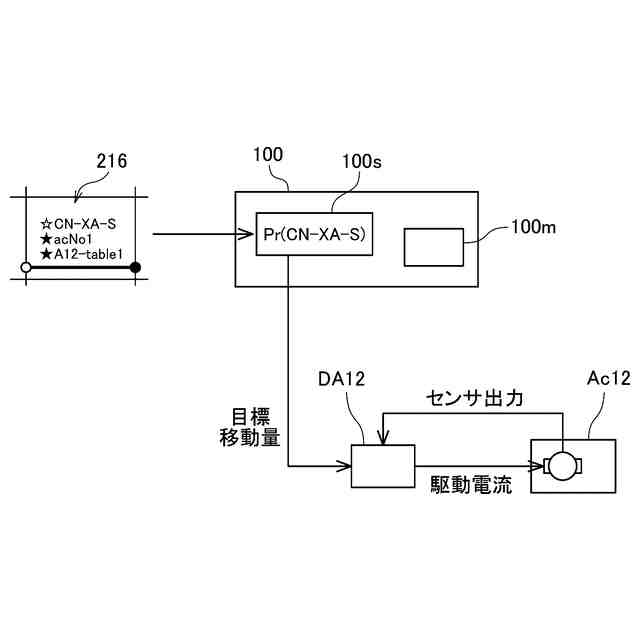
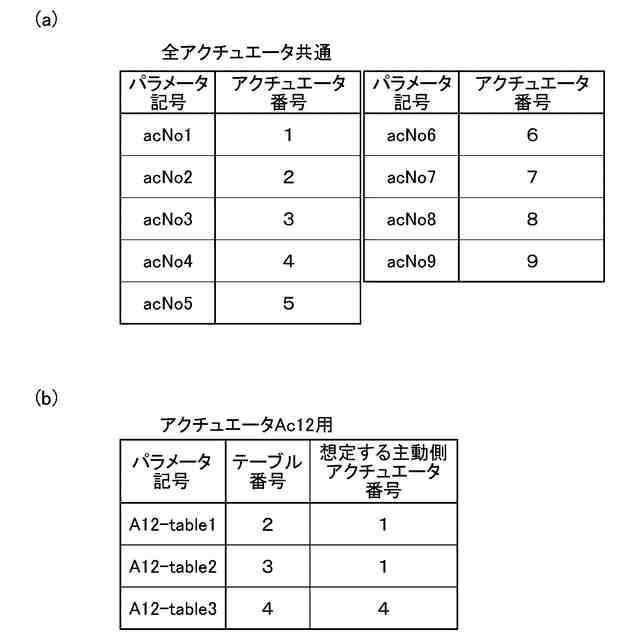
所定の第1の前記アクチュエータの移動量である主動側移動量に対して、所定の第2の前記アクチュエータの移動量である従動側移動量が対応付けられた対応関係と、
前記第1のアクチュエータの前記主動側移動量を取得して前記対応関係を適用することによって、前記第2のアクチュエータの前記従動側移動量を生成し、前記従動側移動量を用いて前記第2のアクチュエータを動作させることにより、前記第1のアクチュエータの前記基本動作に対して従動する前記第2のアクチュエータの従動動作(216)を実現する従動プログラム要素(100s)と
を記憶しており、
前記動作チャート読込部が読み込む前記動作チャートは、少なくとも1つの前記部分期間に、前記第1のアクチュエータに対する前記基本動作と、前記第2のアクチュエータに対する前記従動動作とが割り当てられており、
前記制御プログラム生成部は、前記従動動作が割り当てられた前記部分期間については、前記従動動作に対応する前記従動プログラム要素も、前記動作チャート上での前記部分期間の順序に従って結合する
ことを特徴とする制御プログラム生成装置。
続きを表示(約 200 文字)
【請求項2】
請求項1に記載の制御プログラム生成装置であって、
前記基本動作記憶部に記憶された前記従動プログラム要素は、前記第1のアクチュエータの移動量の前記時系列データに対して前記対応関係を適用して、前記第2のアクチュエータの移動量の前記時系列データを生成することによって、前記第2のアクチュエータの前記従動動作を実現する
ことを特徴とする制御プログラム生成装置。
発明の詳細な説明
【技術分野】
【0001】
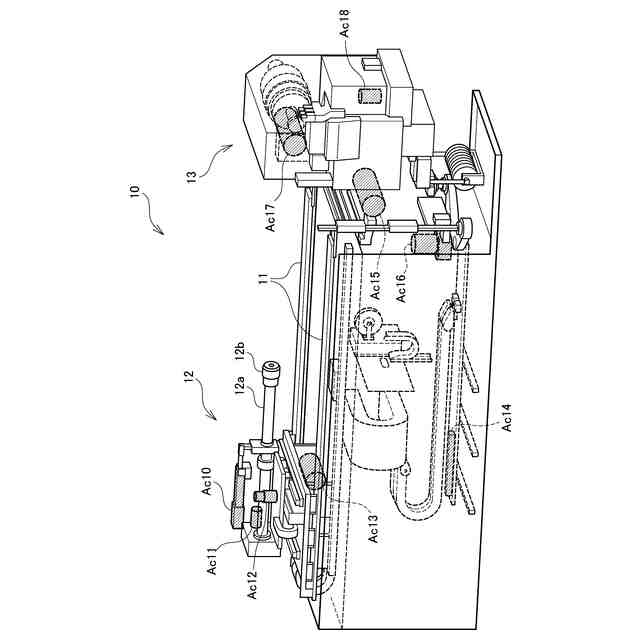
本発明は、複数のアクチュエータを備えた自動製造機械の制御プログラムを自動で生成する技術に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
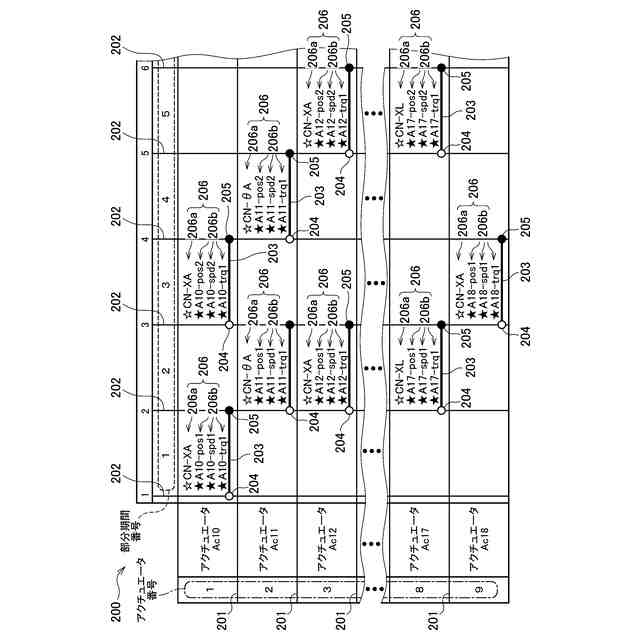
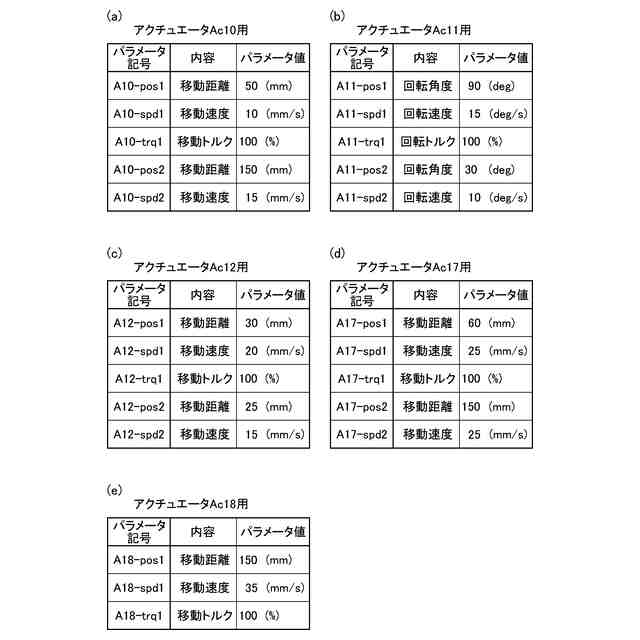
自動製造機械に搭載された複数のアクチュエータの動作を特殊な動作チャート(以下、YOGOチャート)に記載しておき、このYOGOチャートをコンピュータに読み込ませることで、自動製造機械の制御プログラムを自動で生成する技術が実用化されている(特許文献1)。YOGOチャートは、縦軸および横軸が複数に分割された表形式のチャートとなっており、縦軸または横軸の一方の軸には自動製造機械に搭載された複数のアクチュエータが割り当てられている。また、YOGOチャートの他方の軸は、自動機械が動作を開始してから終了するまでの動作期間を表しており、その動作期間は複数の部分期間に分割されている。従って、表形式のYOGOチャートを形成するマス目の1つ1つは、複数のアクチュエータの何れかと、複数の部分期間の何れかとの組み合わせに対応している。そこで、YOGOチャートでは、マス目の位置にアクチュエータの動作内容を記載する。こうすることで、その動作を実行するアクチュエータと、動作させる部分期間とを指定することができる。
【0003】
また、YOGOチャートのマス目の位置には、アクチュエータの基本動作を記載する。ここで、アクチュエータの基本動作とは、アクチュエータが所定の距離だけ前進あるいは後退する動作や、所定の角度だけ回転する動作のように、アクチュエータが備える最も基本的な動作である。自動製造機械のどのような複雑な動作も個々のアクチュエータの基本動作に分解することができるから、YOGOチャートのマス目の位置に基本動作を記載することによって自動製造機械の動作を記述することができる。そして、このようなYOGOチャートを作成しておけば、先頭の部分期間から順番に、その部分期間に割り当てられた内容を読み出してアクチュエータに基本動作を実行させる動作を繰り返していくことで、自動製造機械に所望の動作をさせることができる。
【0004】
また、上述した従来の技術は既に多くの自動製造機械に適用されており、それらの何れにおいても安定して動作することが確認されている。このように非常に安定して動作する理由は、この技術が次の2つの特徴を有しているためと考えられる。
【0005】
先ず第1の特徴としては、YOGOチャートに記載する基本動作を、回転や進退動などの非常に単純な動作としている点が挙げられる。このような単純な動作であれば、動作を指定する際に曖昧な部分が生じない。そして、YOGOチャートには基本動作を実行する順番が記載されているから、自動製造機械の動作を、何ら曖昧な部分を生じさせずに記述することができる。加えて、第1の特徴(基本動作が非常に単純な動作である)から、アクチュエータに基本動作させるプログラムを予め作成しておくことができ、しかも基本動作の種類も限られているので、予め作成しておくプログラムの種類も少なくて良いという実用上の大きな利点がある。
【0006】
また、第2の特徴としては、1つの部分期間で複数の基本動作を実行する場合、それら全ての基本動作が終了しなければ次の部分期間の基本動作を開始できないこととしている点が挙げられる。こうすれば、同時に動作し得るアクチュエータは同じ部分期間に割り当てられたアクチュエータに限定されるので、予期せぬタイミングで予期せぬアクチュエータが動作して、アクチュエータ同士が干渉することがない。上述した従来の技術はこれらの2つの特徴を有しているために、非常に安定して動作するものと考えられる。
【先行技術文献】
【特許文献】
【0007】
特許第6829505号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、自動製造機械では、あるアクチュエータの基本動作に合わせて他のアクチュエータを動作させる必要が生じる場合があり、このような動作(別のアクチュエータの基本動作に合わせて従動する動作)を、上述した2つの特徴を備えたままで実現する方法については、分かっていないという問題があった。
【0009】
この発明は、上述した従来の技術が有する上述した課題を解決するために成されたものであり、自動製造機械のアクチュエータが他のアクチュエータに従動するような動作を含む場合でも、自動製造機械の制御プログラムを自動で生成することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するために、本発明の制御プログラム生成装置は次の構成を採用した。すなわち、
複数のアクチュエータを備えた自動製造機械(10)の制御プログラム(400)を生成する制御プログラム生成装置(110)であって、
前記アクチュエータが指定された動作量で該アクチュエータの自由度方向に動作する基本動作(206)を、前記基本動作を実現するプログラム要素(100p)と対応付けて記憶している基本動作記憶部(112)と、
前記自動製造機械が動作を開始してから終了するまでの動作期間が複数の部分期間に分割されており、前記自動製造機械の動作が複数の前記基本動作に分解されると共に、前記基本動作が前記複数の部分期間の何れか1つの前記部分期間に割り当てられることによって前記自動製造機械の動作が記述された動作チャート(200)を読み込む動作チャート読込部(111)と、
前記動作チャート上の複数の前記部分期間に割り当てられた複数の前記基本動作の前記プログラム要素を、前記動作チャート上での前記部分期間の順序に従って結合することにより、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成部(113、114)と
を備え、
前記基本動作記憶部に記憶された前記プログラム要素は、前記アクチュエータを前記動作量で動作させるための、前記アクチュエータの移動量の時系列データを生成することによって、前記基本動作を実現しており、
前記基本動作記憶部は、
所定の第1の前記アクチュエータの移動量である主動側移動量に対して、所定の第2の前記アクチュエータの移動量である従動側移動量が対応付けられた対応関係と、
前記第1のアクチュエータの前記主動側移動量を取得して前記対応関係を適用することによって、前記第2のアクチュエータの前記従動側移動量を生成し、前記従動側移動量を用いて前記第2のアクチュエータを動作させることにより、前記第1のアクチュエータの前記基本動作に対して従動する前記第2のアクチュエータの従動動作(216)を実現する従動プログラム要素(100s)と
を記憶しており、
前記動作チャート読込部が読み込む前記動作チャートは、少なくとも1つの前記部分期間に、前記第1のアクチュエータに対する前記基本動作と、前記第2のアクチュエータに対する前記従動動作とが割り当てられており、
前記制御プログラム生成部は、前記従動動作が割り当てられた前記部分期間については、前記従動動作に対応する前記従動プログラム要素も、前記動作チャート上での前記部分期間の順序に従って結合する
ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
25日前
株式会社ダイヘン
移動体
3か月前
オムロン株式会社
スレーブ装置
1日前
株式会社FUJI
加工機械ライン
2か月前
ローム株式会社
基準電圧源
22日前
愛知製鋼株式会社
車両用システム
1か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
29日前
株式会社ダイフク
搬送設備
11日前
株式会社ダイフク
搬送設備
1か月前
株式会社オプトン
制御プログラム生成装置
3か月前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社鷺宮製作所
制御装置
3か月前
株式会社ダイヘン
負荷時タップ切換器
3か月前
トヨタ自動車株式会社
クラッチペダル
1か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
3か月前
マーク ヘイリー
消防ロボット
2か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
制御装置
1日前
株式会社ダイフク
物品搬送設備
3か月前
キヤノン株式会社
配送システム
25日前
株式会社ダイフク
物品搬送設備
11日前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
株式会社TMEIC
安全性診断装置
5日前
アズビル株式会社
制御システムおよび制御方法
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ