TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096577
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2025066821,2021024702
出願日
2025-04-15,2021-02-18
発明の名称
路面状態推定装置、路面状態推定方法および路面状態推定プログラム
出願人
パイオニア株式会社
代理人
個人
主分類
E01C
23/01 20060101AFI20250619BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】路面状態を精度よく推定すること。
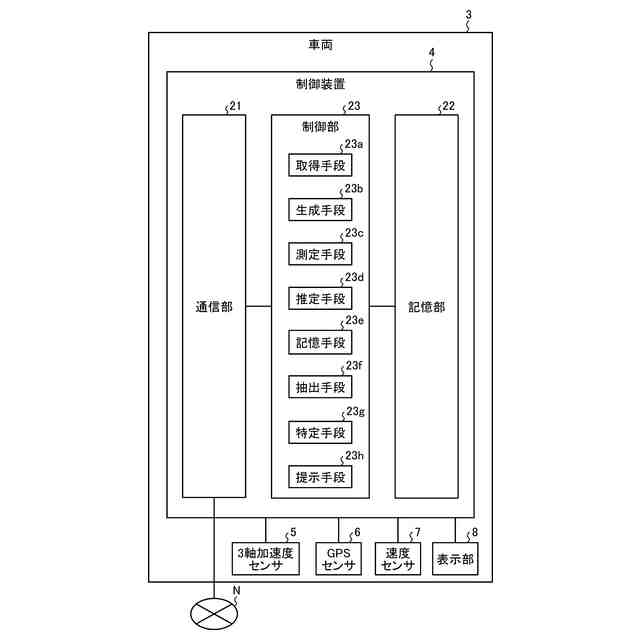
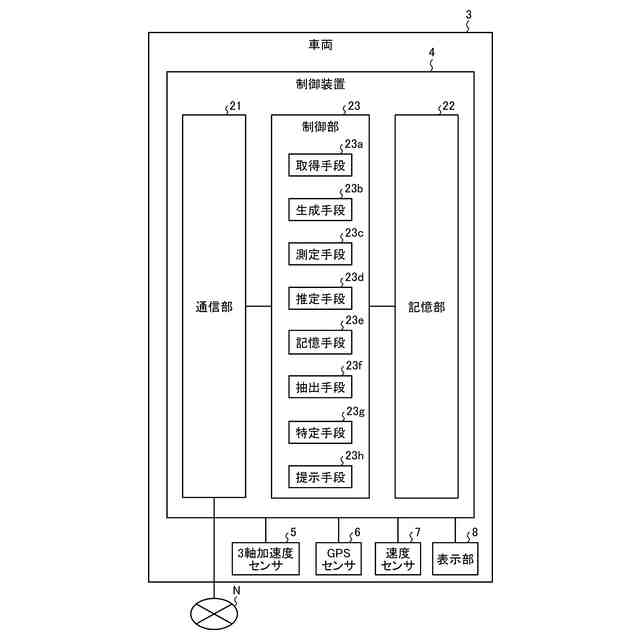
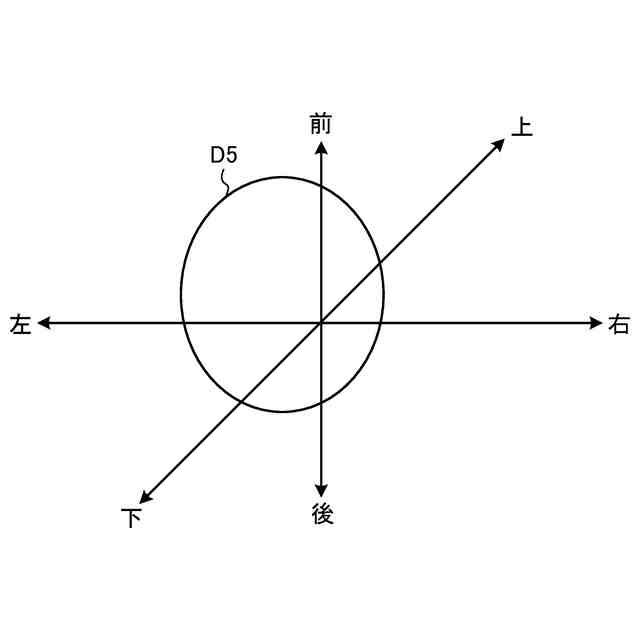
【解決手段】路面状態推定装置は、取得手段23aと、測定手段23cと、推定手段23dとを備える。取得手段23aは、移動体の加速度を含む走行情報を取得する。測定手段23cは、取得手段23aにより取得された走行情報に基づく移動体の加速度の複数軸の分布に基づいて、移動体の振動に関する情報を測定する。推定手段23dは、測定手段23cにより測定された移動体の振動に関する情報に基づいて、路面状態を推定する。測定手段23cは、移動体の振動に関する情報として、移動体の振動位置の偏りを測定する。推定手段23dは、測定手段23cにより測定された移動体の振動位置の偏りに基づいて、路面状態を推定する。
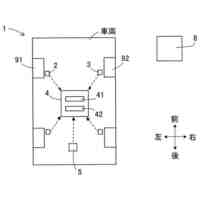
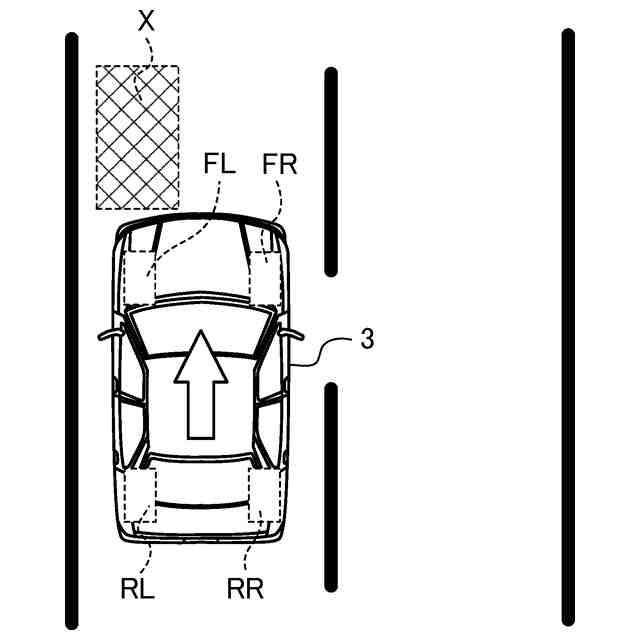
【選択図】図3
特許請求の範囲
【請求項1】
移動体の加速度を含む走行情報を取得する取得手段と、
前記取得手段により取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する測定手段と、
前記測定手段により測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する推定手段と、を備え、
前記測定手段は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定し、
前記推定手段は、前記測定手段により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する
ことを特徴とする路面状態推定装置。
続きを表示(約 1,600 文字)
【請求項2】
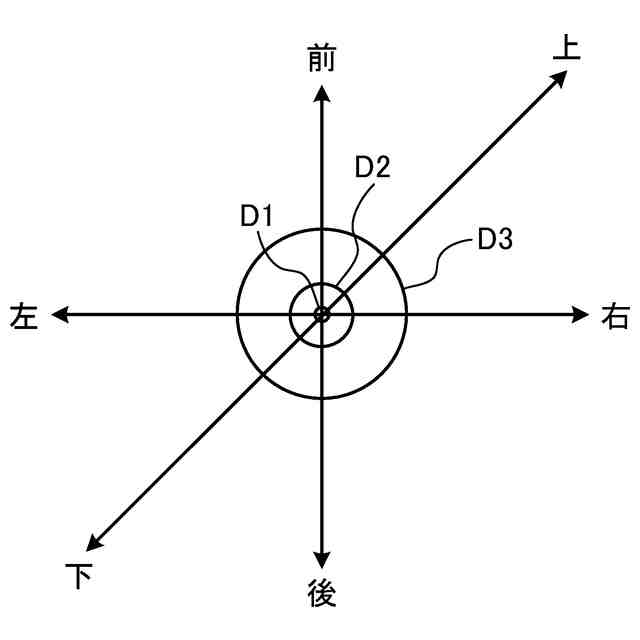
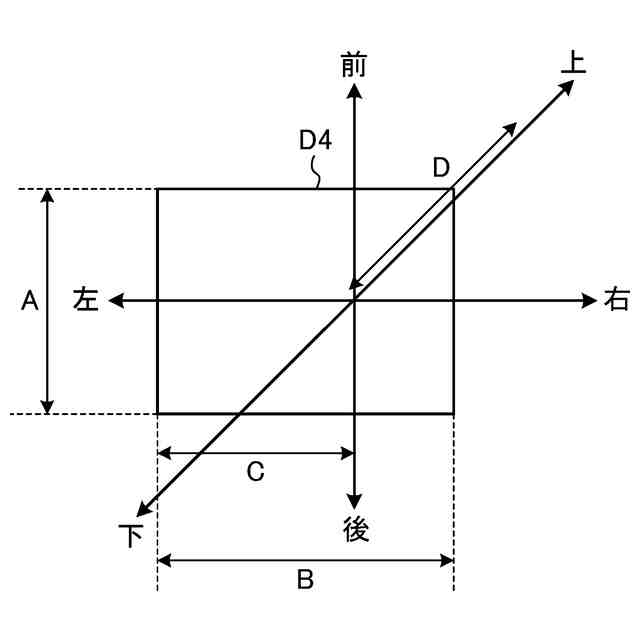
前記取得手段により取得された前記走行情報を用いて、所定の単位時間における加速度の3軸の分布を3次元座標系にプロットした加速度値分布図を生成する生成手段、をさらに備え、
前記測定手段は、前記生成手段で生成された前記加速度値分布図の形状に基づいて、前記移動体の振動位置の偏りを測定する
ことを特徴とする請求項1に記載の路面状態推定装置。
【請求項3】
前記推定手段は、前記移動体の振動位置の偏りに基づいて、走行車線において前記路面状態が傷んだ地点の横位置を推定する、
ことを特徴とする請求項1または2に記載の路面状態推定装置。
【請求項4】
前記測定手段は、前記移動体の振動に関する情報として、前記移動体の振動の大きさを測定し、
前記推定手段は、前記測定手段により測定された前記移動体の振動の大きさに基づいて、前記路面状態を推定する
ことを特徴とする請求項1~3のいずれか一つに記載の路面状態推定装置。
【請求項5】
前記取得手段により取得された前記走行情報を用いて、所定の単位時間における加速度の3軸の分布を3次元座標系にプロットした加速度値分布図を生成する生成手段、をさらに備え、
前記測定手段は、前記生成手段で生成された前記加速度値分布図の形状に基づいて、前記移動体の振動の大きさを測定する
ことを特徴とする請求項4に記載の路面状態推定装置。
【請求項6】
前記推定手段は、前記移動体の振動の大きさに基づいて、路面表面の起伏を推定する
ことを特徴とする請求項4または5に記載の路面状態推定装置。
【請求項7】
前記取得手段は、前記移動体の内部に位置する1つの3軸加速度センサから前記走行情報を取得する
ことを特徴とする請求項1~6のいずれか一つに記載の路面状態推定装置。
【請求項8】
前記取得手段は、前記移動体の位置情報を前記走行情報としてさらに取得し、
前記取得手段により取得された前記位置情報と、前記推定手段により推定された前記路面状態とを関連付けて路面情報記憶部に記憶する記憶手段、をさらに備える
ことを特徴とする請求項1~7のいずれか一つに記載の路面状態推定装置。
【請求項9】
路面状態推定装置が実施する路面状態推定方法であって、
移動体の加速度を含む走行情報を取得する取得工程と、
取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する測定工程と、
測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する推定工程と、
を含み、
前記測定工程は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定し、
前記推定工程は、前記測定工程により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する
ことを特徴とする路面状態推定方法。
【請求項10】
移動体の加速度を含む走行情報を取得する取得手段と、
取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する測定手段と、
測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する推定手段と、
を含み
前記測定手段は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定し、
前記推定手段は、前記測定手段により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する
処理をコンピュータに実行させるための路面状態推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、路面状態推定装置、路面状態推定方法および路面状態推定プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、車両の上下方向の加速度を取得することにより、レーザスキャン装置やカメラを備えた路面性状測定車両を用いることなく、路面に凹凸が存在しているか否かを判定する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-71318号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来技術では、車両の上下方向の加速度しか取得していないことから、路面に存在する凹凸の詳細な状態を検知する上でさらなる改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、たとえば、路面状態を精度よく推定することができる路面状態推定装置、路面状態推定方法および路面状態推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の路面状態推定装置は、取得手段と、測定手段と、推定手段とを備える。取得手段は、移動体の加速度を含む走行情報を取得する。測定手段は、前記取得手段により取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する。推定手段は、前記測定手段により測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する。前記測定手段は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定する。前記推定手段は、前記測定手段により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する。
【0007】
また、請求項9に記載の路面状態推定方法は、路面状態推定装置が実施する路面状態推定方法であって、移動体の加速度を含む走行情報を取得する取得工程と、取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する測定工程と、測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する推定工程と、を含み、前記測定工程は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定し、前記推定工程は、前記測定工程により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する。
【0008】
また、請求項10に記載の路面状態推定プログラムは、移動体の加速度を含む走行情報を取得する取得手段と、取得された前記走行情報に基づく前記移動体の加速度の複数軸の分布に基づいて、前記移動体の振動に関する情報を測定する測定手段と、測定された前記移動体の振動に関する情報に基づいて、路面状態を推定する推定手段と、を含み、前記測定手段は、前記移動体の振動に関する情報として、前記移動体の振動位置の偏りを測定し、前記推定手段は、前記測定手段により測定された前記移動体の振動位置の偏りに基づいて、前記路面状態を推定する処理をコンピュータに実行させるための路面状態推定プログラムである。
【図面の簡単な説明】
【0009】
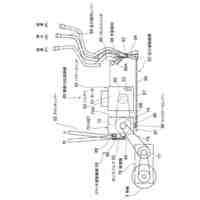
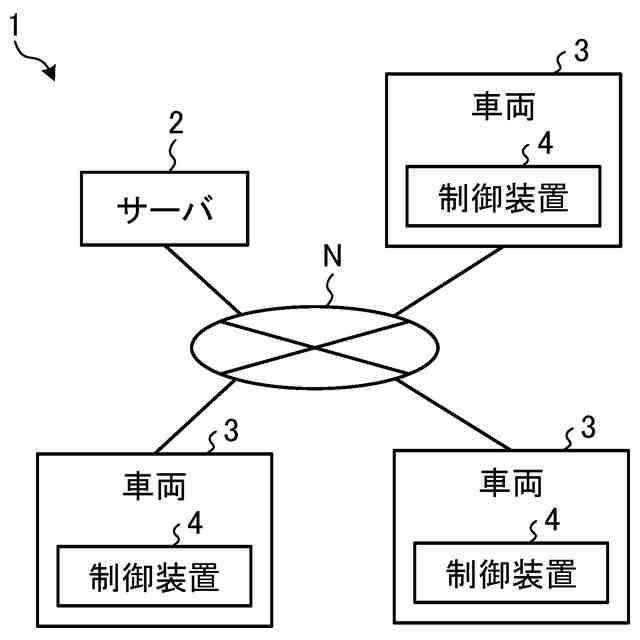
図1は、実施の形態1に係る制御システムの構成の一例を示す説明図である。
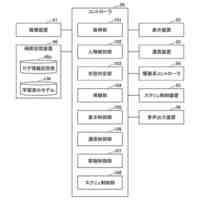
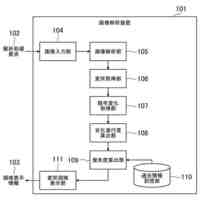
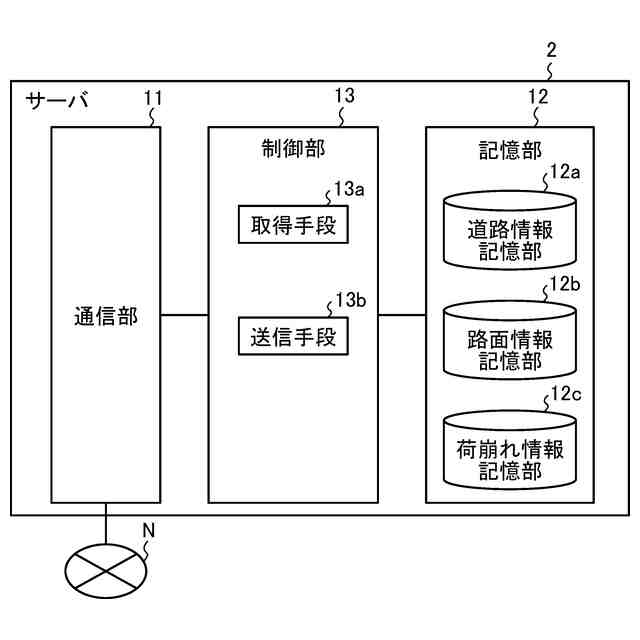
図2は、実施の形態1に係るサーバの構成の一例を示す説明図である。
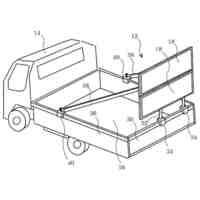
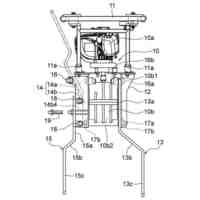
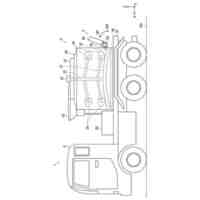
図3は、実施の形態1に係る車両の構成の一例を示す説明図である。
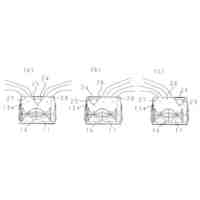
図4は、実施の形態1に係る加速度値分布図の一例を示す図である。
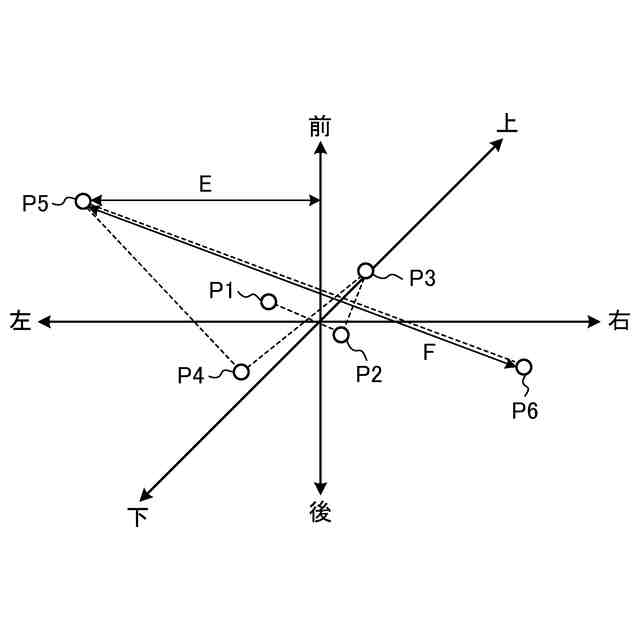
図5は、実施の形態1に係る路面状態推定処理の一例を説明するための図である。
図6は、実施の形態1に係る加速度値分布図の一例を示す図である。
図7は、実施の形態1に係る運転支援処理の一例を説明するための図である。
図8は、実施の形態1に係る運転支援処理の一例を説明するための図である。
図9は、実施の形態1に係る運転支援処理の一例を説明するための図である。
図10は、実施の形態2に係る車両の構成の一例を示す説明図である。
図11は、実施の形態1に係る路面状態推定処理の手順を示すフローチャートである。
図12は、実施の形態1に係る運転支援処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下に、図面を参照しつつ、本発明を実施するための形態(以下、実施の形態)について説明する。なお、以下に説明する実施の形態によって本発明が限定されるものではない。さらに、図面の記載において、同一の部分には同一の符号を付している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ハルコン
除雪機
1か月前
有限会社アステ
組立て看板
25日前
岳南光機株式会社
路面標示施工装置
16日前
保線機器整備株式会社
ハンドタイタンパ
1か月前
株式会社英知
固化剤及び固化剤の製造方法
1か月前
日本ジュウキケンセツ株式会社
搭乗設備機構
12日前
住友建機株式会社
アスファルトフィニッシャ
1か月前
有限会社山桂ハウジング
転圧ローラ
2日前
コスモシステム株式会社
防護柵用支柱および防護柵
3日前
日進ゴム株式会社
ボラードの製造方法
4日前
株式会社大林組
コンクリート構造体の施工方法
23日前
テクノス株式会社
床版支持構造
10日前
株式会社 トラストプラン
融雪装置
17日前
個人
衝突防止機能を持つ埋め込み式電子装置
17日前
三井住友建設株式会社
橋桁の補修方法
19日前
株式会社シー・エス・ケエ
アスファルト舗装材の車載溶解装置
16日前
鹿島建設株式会社
接合構造および接合方法
9日前
松岡コンクリート工業株式会社
基礎ブロックの連結構造。
29日前
株式会社NIPPO
路面加熱装置
23日前
株式会社大林組
路盤の施工方法及び路盤
25日前
モリスアンドコー,カンパニー,リミテッド
境界石用止水板
4日前
日本ジュウキケンセツ株式会社
仮桟橋構築工法及び仮桟橋解体工法
12日前
日鉄神鋼建材株式会社
土砂災害防止工法
1か月前
株式会社フタミ
斫り装置及び斫り方法並びにそれに用いられるカバー
1か月前
トヨタ自動車株式会社
路面状態検出システム
1か月前
株式会社NIPPO
アスファルトクッカ
29日前
キヤノン株式会社
画像解析装置、画像解析装置の制御方法およびプログラム
1か月前
三井住友建設株式会社
接合構造の構築方法及び仮支持部材
1か月前
東海旅客鉄道株式会社
レールボンド検出装置及び継目板検出装置
29日前
住友建機株式会社
情報処理装置、路面舗装システム、道路機械及びプログラム
19日前
名古屋電機工業株式会社
制御システム
9日前
青野スポーツ施設株式会社
グラウンドのリフォーム工法
3日前
三井住友建設株式会社
コンクリート施工方法
2日前
三井住友建設株式会社
プレキャストコンクリート部材の支持構造
1か月前
三井住友建設株式会社
逆台形箱桁橋及び逆台形箱桁橋の架設方法
3日前
日鉄神鋼建材株式会社
位置決め部材、及び該位置決め部材を備えた防護柵固定装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ