TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096945
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023212959
出願日
2023-12-18
発明の名称
管理システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/09 20060101AFI20250623BHJP(信号)
要約
【課題】モビリティの遠隔操作の精度を確保すること。
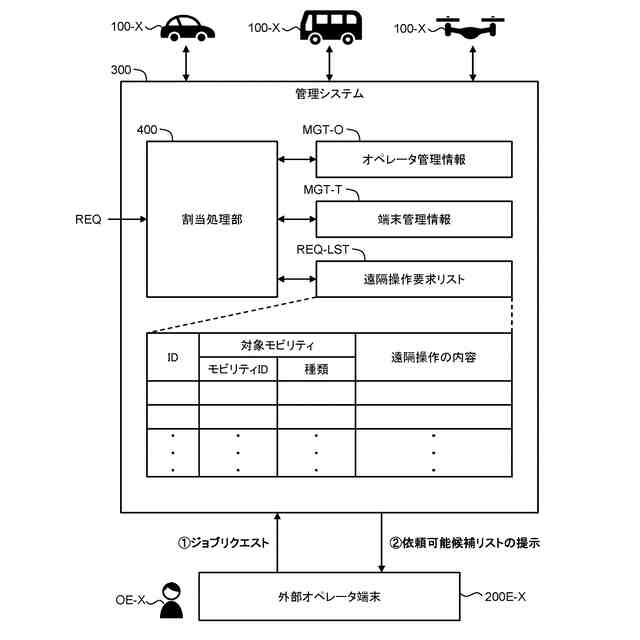
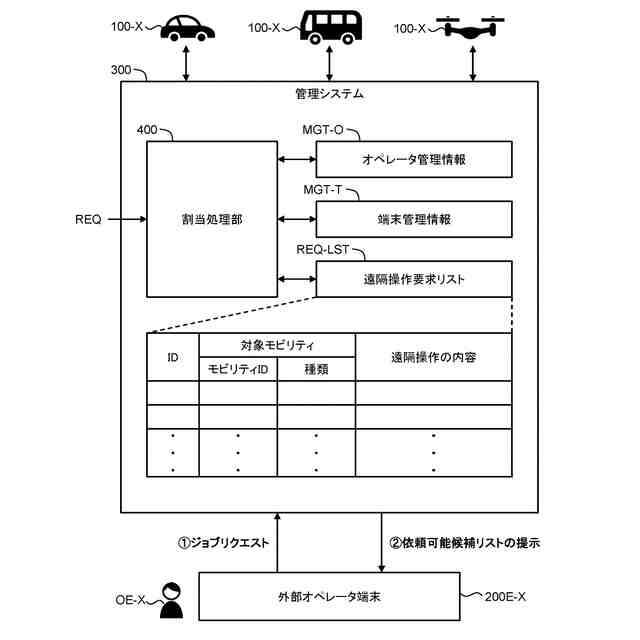
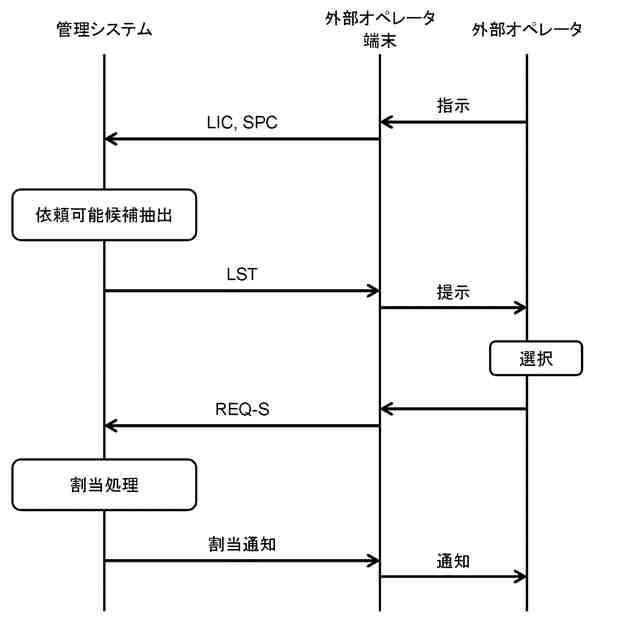
【解決手段】外部オペレータは、遠隔操作管理センターの外の遠隔オペレータである。外部オペレータ端末は、遠隔操作のために外部オペレータによって使用される。管理システムは、外部オペレータが有するライセンスを示すライセンス情報と外部オペレータ端末のスペックを示す端末スペック情報の少なくとも一方を取得する。管理システムは、遠隔操作要求リストのうち、外部オペレータのライセンスと外部オペレータ端末のスペックの少なくとも一方で対応可能な遠隔操作要求を依頼可能候補として抽出する。管理システムは、外部オペレータをいずれかの遠隔操作要求に割り当てる前に、1以上の依頼可能候補の情報を外部オペレータ端末に送信する。
【選択図】図3
特許請求の範囲
【請求項1】
モビリティの遠隔操作を管理するための遠隔操作管理センターに設置される管理システムであって、
外部オペレータは、前記遠隔操作管理センターの外の遠隔オペレータであり、
外部オペレータ端末は、前記遠隔操作のために前記外部オペレータによって使用されるように構成された遠隔オペレータ端末であり、
前記管理システムは、
1又は複数のプロセッサと、
1以上の遠隔操作要求を含む遠隔操作要求リストを格納する1又は複数の記憶装置と
を備え、
前記1又は複数のプロセッサは、
前記外部オペレータが有するライセンスを示すライセンス情報と前記外部オペレータ端末のスペックを示す端末スペック情報の少なくとも一方を取得し、
前記遠隔操作要求リストのうち、前記外部オペレータの前記ライセンスと前記外部オペレータ端末の前記スペックの少なくとも一方で対応可能な遠隔操作要求を依頼可能候補として抽出し、
前記外部オペレータをいずれかの遠隔操作要求に割り当てる前に、1以上の依頼可能候補の情報を前記外部オペレータ端末に送信する
ように構成された
管理システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の管理システムであって、
前記1又は複数のプロセッサは、更に、
前記1以上の依頼可能候補のうち前記外部オペレータによって選択される選択遠隔操作要求の情報を、前記外部オペレータ端末から受け取り、
前記外部オペレータと前記外部オペレータ端末を前記選択遠隔操作要求に割り当てる
ように構成された
管理システム。
【請求項3】
請求項2に記載の管理システムであって、
前記1又は複数のプロセッサは、更に、
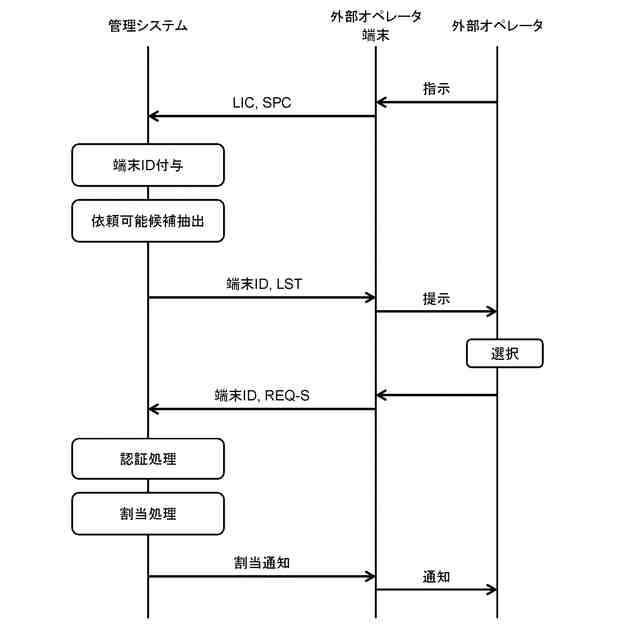
前記外部オペレータ端末に識別情報を付与し、
前記1以上の依頼可能候補の前記情報と共に前記識別情報を前記外部オペレータ端末に送信し、
前記選択遠隔操作要求の前記情報と共に前記識別情報を前記外部オペレータ端末から受け取り、
前記外部オペレータ端末から受け取った前記識別情報に基づいて、前記外部オペレータ端末の認証を行い、
前記認証が成功した場合に、前記外部オペレータと前記外部オペレータ端末を前記選択遠隔操作要求に割り当てる
ように構成された
管理システム。
【請求項4】
請求項1に記載の管理システムであって、
前記1以上の遠隔操作要求の各々は、対象モビリティの種類と前記対象モビリティの前記遠隔操作の内容の少なくとも一方を含み、
前記1又は複数のプロセッサは、更に、
前記対象モビリティの前記種類と前記対象モビリティの前記遠隔操作の前記内容の少なくとも一方に基づいて、前記各々の遠隔操作要求に関して要求される要求端末スペックを認識し、
前記要求端末スペックが前記外部オペレータ端末の前記スペックによって満たされるような遠隔操作要求を前記依頼可能候補として抽出する
ように構成された
管理システム。
【請求項5】
請求項1に記載の管理システムであって、
前記1以上の遠隔操作要求の各々は、対象モビリティの種類を少なくとも含み、
前記1又は複数のプロセッサは、更に、
前記対象モビリティの前記種類に基づいて、前記各々の遠隔操作要求に関して要求される要求ライセンスを認識し、
前記要求ライセンスが前記外部遠隔オペレータの前記ライセンスに含まれるような遠隔操作要求を前記依頼可能候補として抽出する
ように構成された
管理システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モビリティの遠隔操作に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、車両遠隔操作支援システムを開示している。オペレータが不足している場合、車両遠隔操作支援システムは、管制センタから離れた外部センタ内の外部オペレータに遠隔操作支援を要求する。
【先行技術文献】
【特許文献】
【0003】
特開2020-42764号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の特許文献1に記載の技術によれば、システムが外部オペレータに対して一方的に要求を行うため、外部オペレータには選択の余地がない。外部オペレータは、意図しない遠隔操作支援の遂行を強いられるおそれがある。その結果、遠隔操作支援の精度が低下するおそれがある。
【課題を解決するための手段】
【0005】
本開示の1つの観点は、モビリティの遠隔操作を管理するための遠隔操作管理センターに設置される管理システムに関する。
外部オペレータは、遠隔操作管理センターの外の遠隔オペレータである。外部オペレータ端末は、遠隔操作のために外部オペレータによって使用されるように構成された遠隔オペレータ端末である。
管理システムは、1又は複数のプロセッサと、1以上の遠隔操作要求を含む遠隔操作要求リストを格納する1又は複数の記憶装置とを備える。
1又は複数のプロセッサは、外部オペレータが有するライセンスを示すライセンス情報と外部オペレータ端末のスペックを示す端末スペック情報の少なくとも一方を取得する。1又は複数のプロセッサは、遠隔操作要求リストのうち、外部オペレータのライセンスと外部オペレータ端末のスペックの少なくとも一方で対応可能な遠隔操作要求を依頼可能候補として抽出する。1又は複数のプロセッサは、外部オペレータをいずれかの遠隔操作要求に割り当てる前に、1以上の依頼可能候補の情報を外部オペレータ端末に送信する。
【発明の効果】
【0006】
本開示によれば、外部オペレータが遠隔操作要求に割り当てられる前に、依頼可能候補が外部オペレータに提示される。外部オペレータは所望の遠隔操作要求を自分で選択することができるため、遠隔操作の精度が確保される。
【図面の簡単な説明】
【0007】
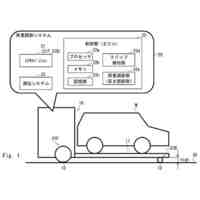
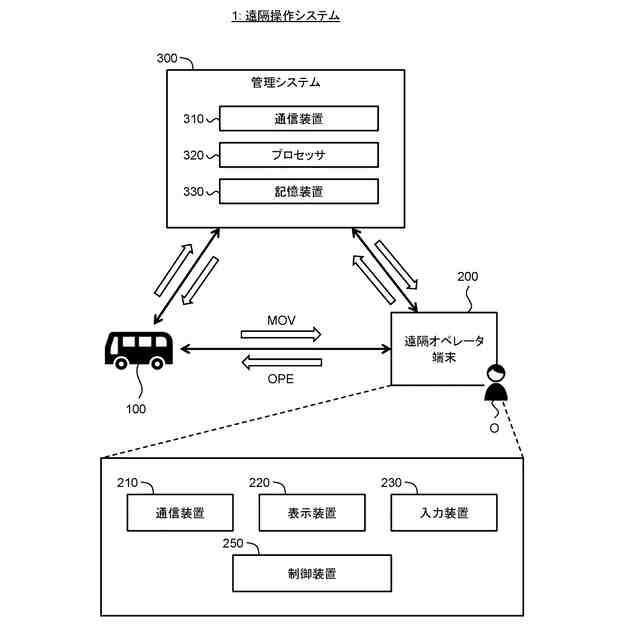
遠隔操作システムの概要を説明するための概念図である。
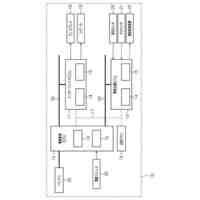
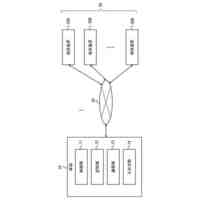
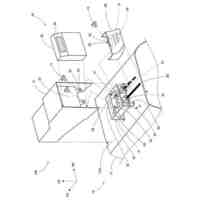
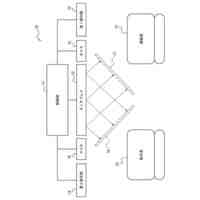
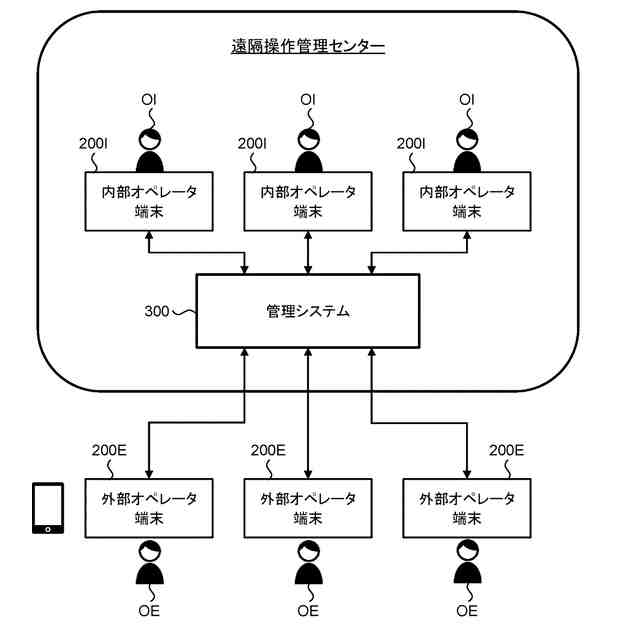
遠隔操作システムの構成例を示す概念図である。
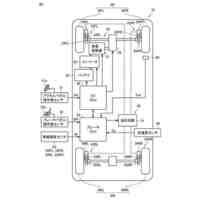
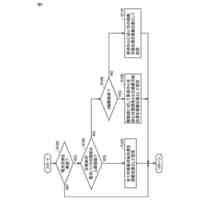
割当処理の概要を説明するための概念図である。
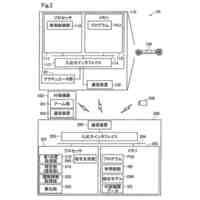
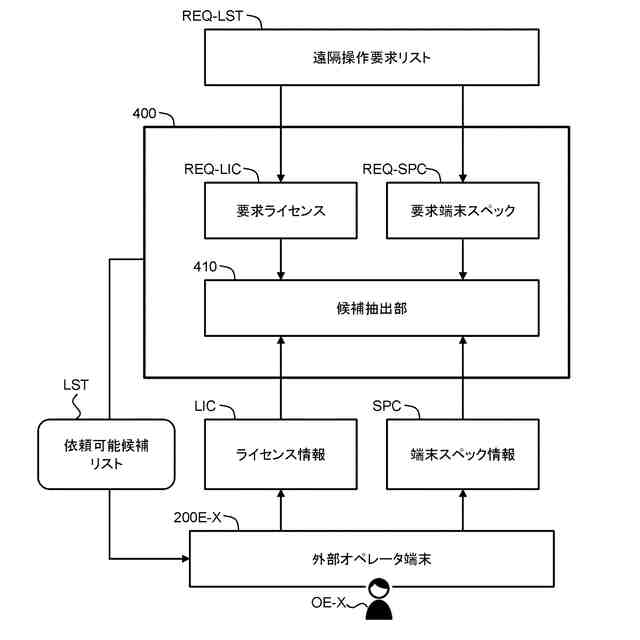
依頼可能候補の抽出の例を説明するためのブロック図である。
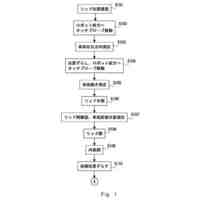
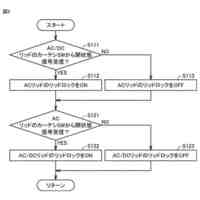
外部オペレータ割当処理に関連する処理フローの第1の例を示す図である。
外部オペレータ割当処理に関連する処理フローの第2の例を示す図である。
【発明を実施するための形態】
【0008】
1.遠隔サポートシステム
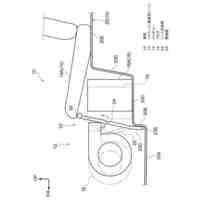
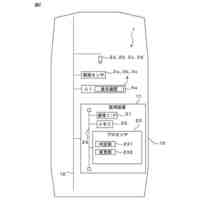
図1は、本実施の形態に係る遠隔操作システム1の概要を説明するための概念図である。遠隔操作システム1は、モビリティ100の遠隔操作のためのシステムである。遠隔操作は遠隔運転を含む概念である。遠隔操作システム1は、モビリティ100、遠隔オペレータ端末200、及び管理システム300を含んでいる。モビリティ100、遠隔オペレータ端末200、及び管理システム300は、通信ネットワークを介して互いに通信可能である。例えば、モビリティ100は、遠隔オペレータ端末200や管理システム300と無線通信ネットワークを介して無線通信可能である。遠隔オペレータ端末200と管理システム300は、有線/無線通信ネットワークを介して互いに通信可能である。
【0009】
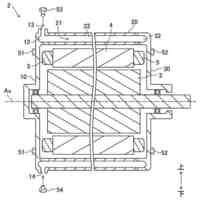
1-1.モビリティ
モビリティ100は、移動可能な移動体である。モビリティ100は、モビリティ100に搭乗したオペレータによって手動で操作されてもよい。モビリティ100は、自律移動機能を備えていてもよい。いずれの場合であっても、モビリティ100は、必要に応じて遠隔でも操作され得るように構成される。すなわち、モビリティ100が、遠隔操作システム1による遠隔操作の対象である。
【0010】
遠隔操作の対象となるモビリティ100の種類は、1つに限られず、複数であってもよい。例えば、モビリティ100は、公道を走行する車両である。他の例として、モビリティ100は、工場内で使用される車両であってもよい。更に他の例として、モビリティ100は、特殊な小型車両であってもよい。更に他の例として、モビリティ100は、建設機械であってもよい。更に他の例として、モビリティ100は、ロボットであってもよい。更に他の例として、モビリティ100は、飛翔体であってもよい。更に他の例として、モビリティ100は、船舶であってもよい。更に他の例として、モビリティ100は、遊園地内の乗り物であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
電極
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電極
10日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
装置
10日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
自動車
17日前
トヨタ自動車株式会社
電極体
4日前
トヨタ自動車株式会社
軸部材
18日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
判定装置
12日前
トヨタ自動車株式会社
監視装置
17日前
トヨタ自動車株式会社
電動車両
3日前
トヨタ自動車株式会社
充電装置
12日前
トヨタ自動車株式会社
操船装置
17日前
トヨタ自動車株式会社
給電装置
6日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
充電装置
6日前
トヨタ自動車株式会社
運搬車両
18日前
トヨタ自動車株式会社
車載装置
6日前
トヨタ自動車株式会社
電池セル
10日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
電動車両
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ