TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100044
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023217129
出願日
2023-12-22
発明の名称
車両制御装置、車両制御方法及びそのプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/08 20120101AFI20250626BHJP(車両一般)
要約
【課題】特殊な状況に対して、自車両をより適切に制御可能な車両制御装置、車両制御方法及びそのプログラムを提供する。
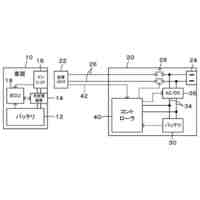
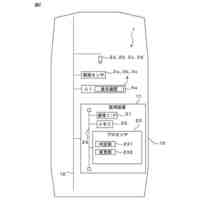
【解決手段】車両制御装置(DS)は、自車両の進行予想領域に存在している障害物との衝突の可能性を低減するための第1動作を行う第1制御システム(11)と、運転者が前記自車両の運転を正常に行うことができない異常状態に陥っている場合、前記自車両を自動的に停止させるための第2制御を実行する第2制御システム(12)を備える。この装置は、前記第2制御を実行していない場合に前記第1動作の実行を開始するために成立する必要がある「第2制御非実行中の第1動作開始条件」と、前記第2制御を実行している場合に前記第1動作の実行を開始するために成立する必要がある「第2制御実行中の第1動作開始条件」と、が互いに相違するように構成されている。
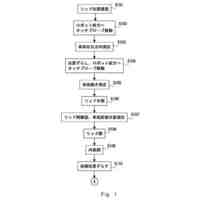
【選択図】図1
特許請求の範囲
【請求項1】
自車両と前記自車両の進行予想領域に存在している障害物との衝突の可能性を低減するための第1動作を行う第1制御システムと、
前記自車両の運転者が前記自車両の運転を正常に行うことができない異常状態に陥っているとの情報を取得した場合、前記自車両を自動的に停止させるための第2制御を実行する第2制御システムと、
を備え、
前記第2制御システムが前記第2制御を実行していない場合に前記第1制御システムが前記第1動作の実行を開始するために成立する必要がある第2制御非実行中の第1動作開始条件と、前記第2制御システムが前記第2制御を実行している場合に前記第1制御システムが前記第1動作の実行を開始するために成立する必要がある第2制御実行中の第1動作開始条件と、が互いに相違するように構成されている、
車両制御装置。
続きを表示(約 3,400 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記第2制御非実行中の第1動作開始条件は、前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第1衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中の第1動作開始条件は、前記衝突指標値が第2衝突判定閾値に到達した場合に成立する条件であり、
前記第2衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも早い時点にて前記衝突指標値が到達する値に設定されている、
車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記衝突指標値は、前記自車両が前記障害物と衝突すると予想される時点までの時間である衝突余裕時間であり、
前記第2衝突判定閾値として設定される早期衝突判定閾値が、前記第1衝突判定閾値として設定される標準衝突判定閾値よりも大きい値に設定されている、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
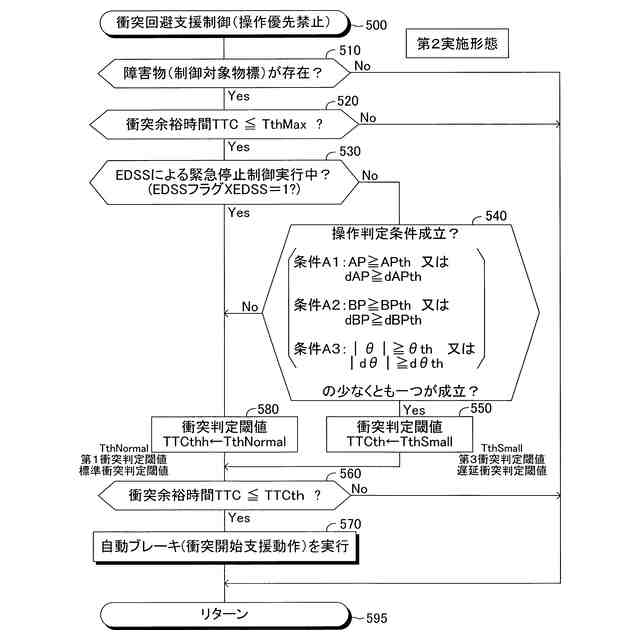
前記第2制御非実行中の第1動作開始条件は、前記運転者が前記自車両の運転操作子を操作している場合に成立する操作判定条件が成立していないときには前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第1衝突判定閾値に到達した場合に成立する条件であり、前記操作判定条件が成立しているときには前記衝突指標値が第3衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中の第1動作開始条件は、前記操作判定条件が成立しているか否かに関わらず、前記衝突指標値が前記第1衝突判定閾値に到達した場合に成立する条件であり、
前記第3衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも遅い時点にて前記衝突指標値が到達する値に設定されている、
車両制御装置。
【請求項5】
請求項4に記載の車両制御装置において、
前記衝突指標値は、前記自車両が前記障害物と衝突すると予想される時点までの時間である衝突余裕時間であり、
前記第3衝突判定閾値として設定される遅延衝突判定閾値が、前記第1衝突判定閾値として設定される標準衝突判定閾値よりも小さい値に設定されている、
車両制御装置。
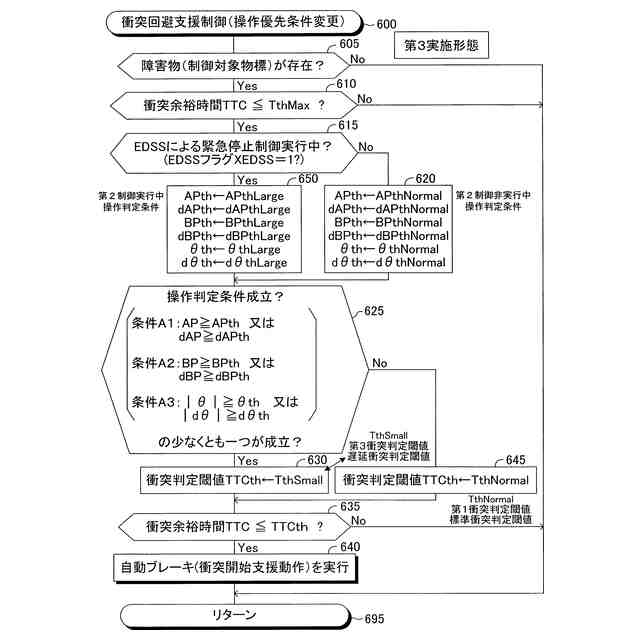
【請求項6】
請求項1に記載の車両制御装置において、
前記第2制御非実行中の第1動作開始条件は、前記運転者が前記自車両の運転操作子を操作している場合に成立する所定の第2制御非実行中操作判定条件が成立していないときには前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第1衝突判定閾値に到達した場合に成立する条件であり、前記第2制御非実行中操作判定条件が成立しているときには前記衝突指標値が第3衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中の第1動作開始条件は、前記運転者が前記運転操作子を操作している場合に成立する所定の第2制御実行中操作判定条件が成立していないときには前記衝突指標値が前記第1衝突判定閾値に到達した場合に成立する条件であり、前記第2制御実行中操作判定条件が成立しているときには前記衝突指標値が前記第3衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中操作判定条件は、前記第2制御非実行中操作判定条件に比べて、前記運転者が前記運転操作子をより速く又はより大きく操作した際に成立するように設定され、
前記第3衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも遅い時点にて前記衝突指標値が到達する値に設定されている、
車両制御装置。
【請求項7】
請求項6に記載の車両制御装置において、
前記衝突指標値は、前記自車両が前記障害物と衝突すると予想される時点までの時間である衝突余裕時間であり、
前記第3衝突判定閾値として設定される遅延衝突判定閾値が、前記第1衝突判定閾値として設定される標準衝突判定閾値よりも小さい値に設定されている、
車両制御装置。
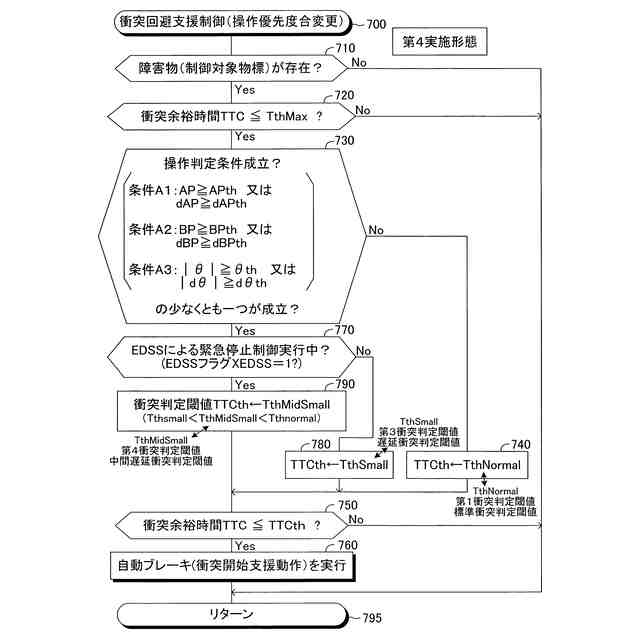
【請求項8】
請求項1に記載の車両制御装置において、
前記第2制御非実行中の第1動作開始条件は、前記運転者が前記自車両の運転操作子を操作している場合に成立する所定の第2制御非実行中操作判定条件が成立していないときには前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第1衝突判定閾値に到達した場合に成立する条件であり、前記第2制御非実行中操作判定条件が成立しているときには前記衝突指標値が第3衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中の第1動作開始条件は、前記運転者が前記運転操作子を操作している場合に成立する所定の第2制御実行中操作判定条件が成立していないときには前記衝突指標値が前記第1衝突判定閾値に到達した場合に成立する条件であり、前記第2制御実行中操作判定条件が成立しているときには前記衝突指標値が第4衝突判定閾値に到達した場合に成立する条件であり、
前記第2制御実行中操作判定条件は、
前記第2制御非実行中操作判定条件と同じ条件であるか、又は、
前記第2制御非実行中操作判定条件に比べて、前記運転者が前記運転操作子をより速く又はより大きく操作した際に成立する条件に設定され、
前記第3衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも遅い時点にて前記衝突指標値が到達する値に設定され、
前記第4衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも遅い時点であり且つ前記衝突指標値が前記第3衝突判定閾値に到達する時点よりも早い時点にて前記衝突指標値が到達する値に設定されている、
車両制御装置。
【請求項9】
請求項8に記載の車両制御装置において、
前記衝突指標値は、前記自車両が前記障害物と衝突すると予想される時点までの時間である衝突余裕時間であり、
前記第3衝突判定閾値として設定される遅延衝突判定閾値が、前記第1衝突判定閾値として設定される標準衝突判定閾値よりも小さい値に設定され、
前記第4衝突判定閾値として設定される中間遅延衝突判定閾値が、前記標準衝突判定閾値よりも小さく且つ前記遅延衝突判定閾値よりも大きい値に設定されている、
車両制御装置。
【請求項10】
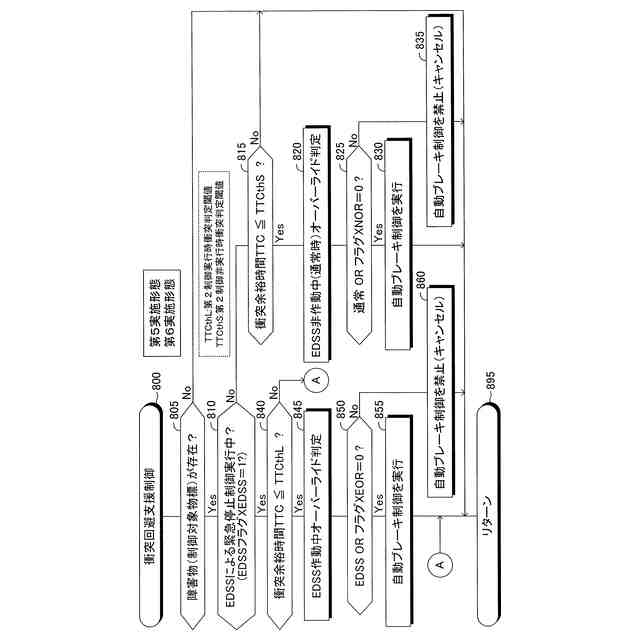
請求項1に記載の車両制御装置において、
前記第1制御システムは、
前記第2制御が実行されていない場合、
前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第2制御非実行時衝突判定閾値に到達している状態において、前記運転者が前記自車両の運転操作子を操作している場合に成立する所定の第2制御非実行中操作判定条件が成立していない場合に前記第2制御非実行中の第1動作開始条件が成立したと判定して前記第1動作の実行を開始し、前記第2制御非実行中操作判定条件が成立しているときには前記第1動作を実行しない、ように構成され、更に、
前記第2制御が実行されている場合、
前記衝突指標値が第2制御実行時衝突判定閾値に到達している状態において、前記運転者が前記運転操作子を操作している場合に成立する所定の第2制御実行中操作判定条件が成立していない場合に前記第2制御実行中の第1動作開始条件が成立したと判定して前記第1動作の実行を開始し、前記第2制御実行中操作判定条件が成立しているときには前記第1動作を実行しない、ように構成され、
前記第2制御実行時衝突判定閾値は、前記衝突指標値が前記第2制御非実行時衝突判定閾値に到達する時点よりも早い時点にて前記衝突指標値が到達する値に設定され、
前記第2制御実行中操作判定条件は、前記第2制御非実行中操作判定条件と、相違する条件に設定されている、
車両制御装置
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両が障害物と衝突することを回避するための第1制御(例えば、衝突回避支援制御)と、運転者が自車両の運転を正常に行うことができない状態(以下、「異常状態」と称する。)に陥っている場合に自車両を減速させて停止させる第2制御(例えば、緊急停止制御)と、を実行する車両制御装置、車両制御方法及びそのプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、自車両の前方の障害物を検知し、自車両が障害物と衝突すると予測される場合、衝突回避支援動作の一つである自動ブレーキを実行する車両制御装置が知られている。このような車両制御装置の一つ(以下、「従来装置」と称する。)は、自車両が障害物と衝突すると予測される場合に運転者によるアクセル操作及び/又はステアリング操作等の運転操作が検出されたとき、それらの運転操作が誤操作であるか否かを判定する。そして、従来装置は、それらの運転操作が誤操作でないと判定した場合には自動ブレーキを実行せず、運転者による運転操作を優先させる。即ち、従来装置は、オーバーライド制御を許容する。これに対し、従来装置は、それらの運転操作が誤操作であると判定した場合にはオーバーライド制御を禁止して自動ブレーキを実行する(例えば、特許文献1を参照。)。
【0003】
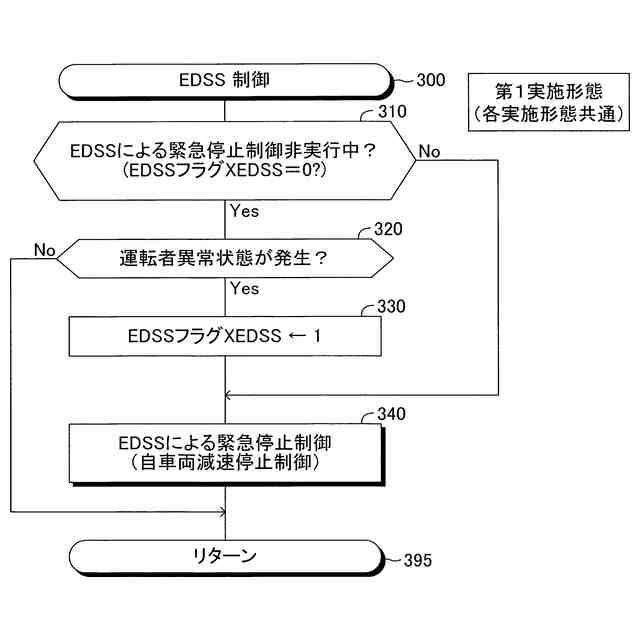
更に、運転者が「運転者自身が予め予測することが困難な体調急変状態」を含む異常状態に陥っているか否かを判定し、そのような判定がなされた場合に自車両を減速させて安全な場所に停止させる制御(以下、「緊急停止制御」と称する。)を行う装置(運転者異常時対応システム:EDSS)が開発されて来ている(例えば、特許文献2を参照。)。
【先行技術文献】
【特許文献】
【0004】
特開2012-121534号公報
特開2017-190048号公報
【発明の概要】
【0005】
しかしながら、自車両が障害物と衝突すると予測される事態が生じた時点において運転者異常時対応システムが作動している場合(即ち、緊急停止制御が実行されている場合)、自車両をどのように制御すべきであるかの検討は十分になされていない。そのため、このような特殊な状況において自車両を適切に制御することができない場合が生じる。
【0006】
本発明は、上記課題を解決するためになされた。即ち、本発明の目的の一つは、上記した特殊な状況に対して、自車両をより適切に制御可能な車両制御装置、車両制御方法及びそのプログラムを提供することにある。
【0007】
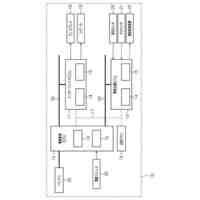
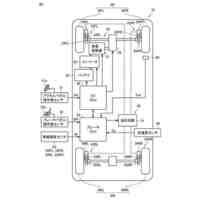
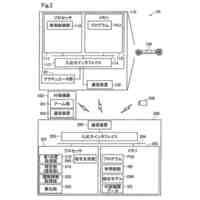
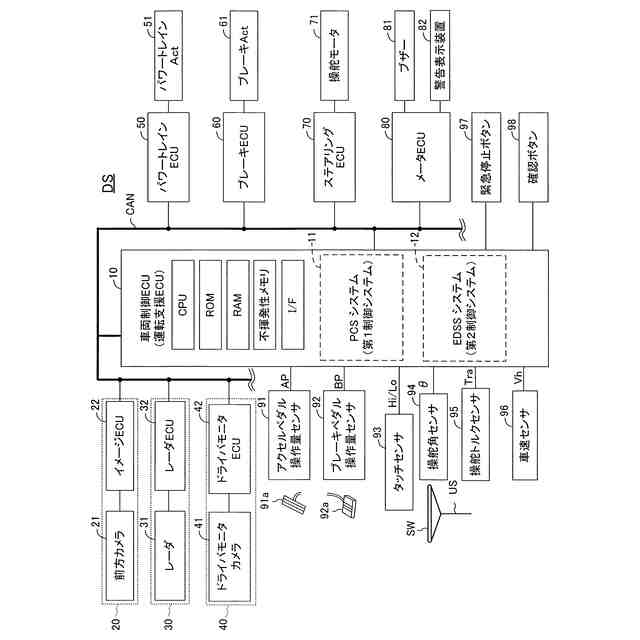
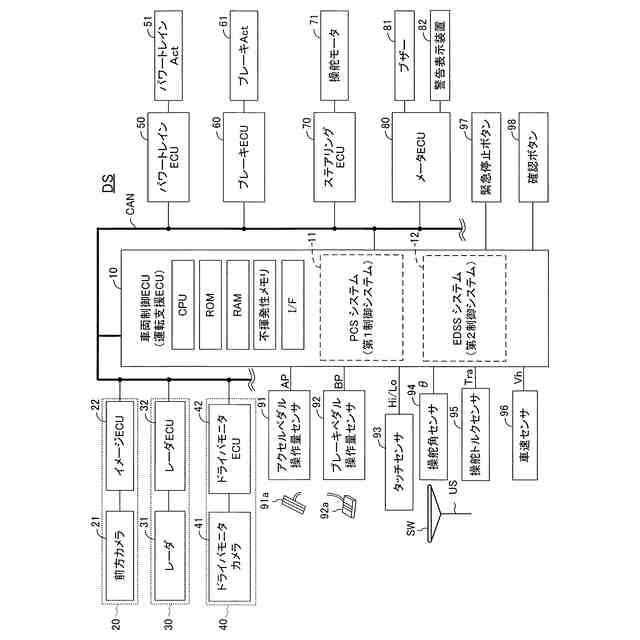
本発明の車両制御装置の一態様(DS)は、
自車両と前記自車両の進行予想領域に存在している障害物との衝突の可能性を低減するための第1動作を行う第1制御システム(第1制御装置11)と、
前記自車両の運転者が前記自車両の運転を正常に行うことができない異常状態に陥っているとの情報を取得した場合、前記自車両を自動的に停止させるための第2制御を実行する第2制御システム(第2制御装置12)と、
を備える。
【0008】
そして、前記車両制御装置(DS)は、
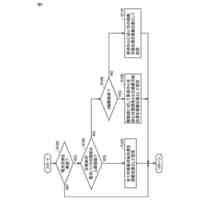
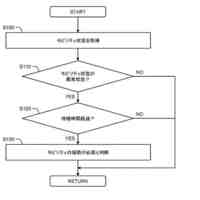
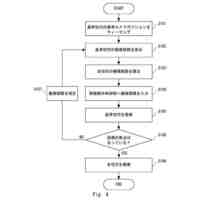
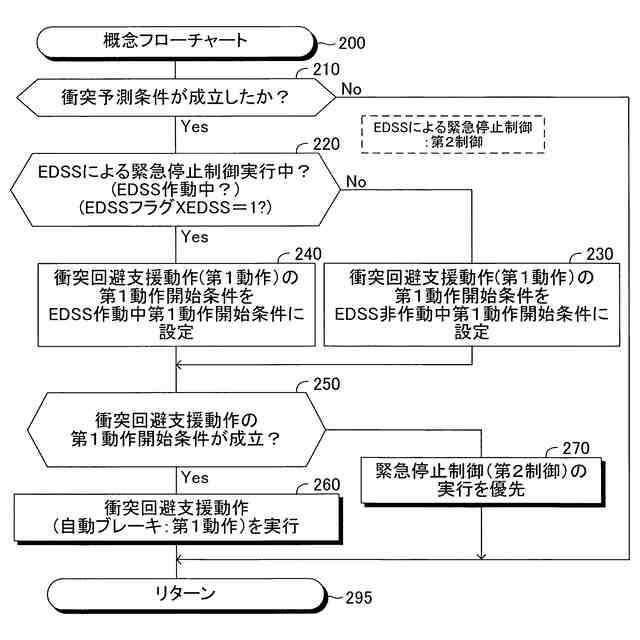
前記第2制御システムが前記第2制御を実行していない場合に前記第1制御システムが前記第1動作の実行を開始するために成立する必要がある「第2制御非実行中の第1動作開始条件」と、前記第2制御システムが前記第2制御を実行している場合に前記第1制御システムが前記第1動作の実行を開始するために成立する必要がある「第2制御実行中の第1動作開始条件」と、が互いに相違するように構成されている(ステップ230、ステップ240)。
【0009】
この態様によれば、「第2制御非実行中の第1動作開始条件」と、「第2制御実行中の第1動作開始条件」と、が互いに相違するように設定されている。従って、以下に述べるように、自車両を自動的に停止させるための第2制御が実行中であるか否かに応じて、衝突の可能性を低減するための第1動作が適切に開始され得るようにすることができる。
【0010】
本発明の一態様において、
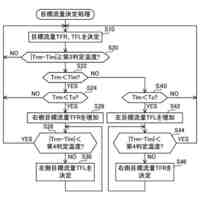
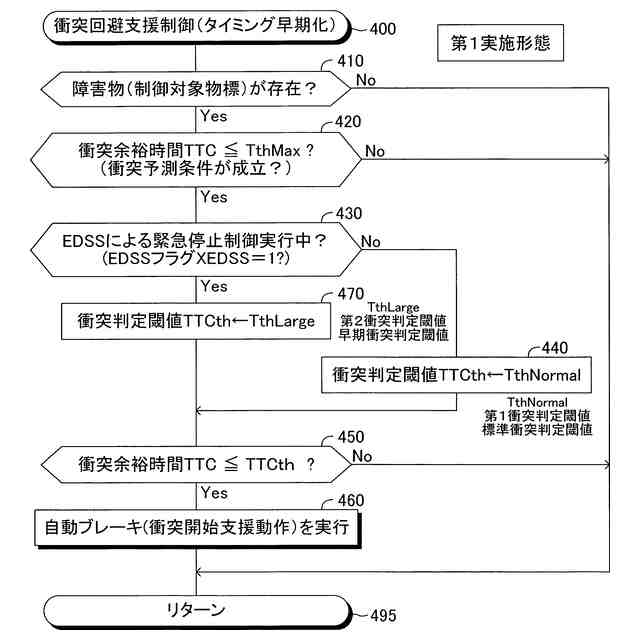
前記第2制御非実行中の第1動作開始条件は、前記自車両が前記障害物と衝突する可能性と相関を有する衝突指標値が第1衝突判定閾値に到達した場合に成立する条件であり(ステップ440及びステップ450)、
前記第2制御実行中の第1動作開始条件は、前記衝突指標値が第2衝突判定閾値に到達した場合に成立する条件であり(ステップ470及びステップ450)、
前記第2衝突判定閾値は、前記衝突指標値が前記第1衝突判定閾値に到達する時点よりも早い時点にて前記衝突指標値が到達する値に設定されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電極
9日前
トヨタ自動車株式会社
電極
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
装置
9日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
自動車
16日前
トヨタ自動車株式会社
電極体
3日前
トヨタ自動車株式会社
充電装置
11日前
トヨタ自動車株式会社
充電装置
5日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
電池セル
9日前
トヨタ自動車株式会社
電源装置
9日前
トヨタ自動車株式会社
給電装置
5日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
記録装置
3日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
判定装置
11日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
電池セル
9日前
トヨタ自動車株式会社
管理装置
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
撮像方法
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
ステータ
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ