TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101341
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218128
出願日
2023-12-25
発明の名称
収穫作業機の走行経路生成装置
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250630BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
穀稈の倒伏状態等の圃場内の情報を含めて、穀稈の詰まりの発生を抑えつつ能率的な走行経路を算出する収穫作業機の走行経路生成装置を提供する。
【解決手段】
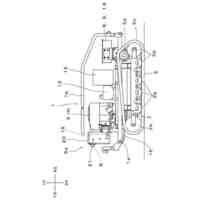
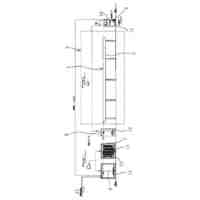
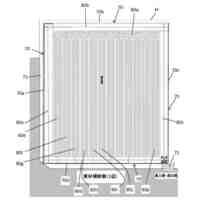
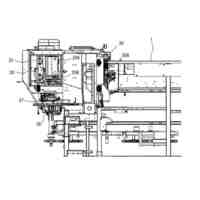
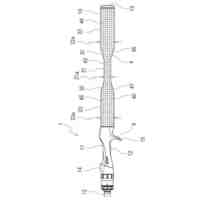
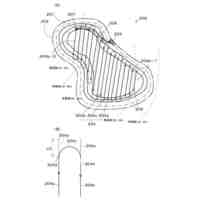
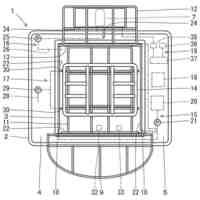
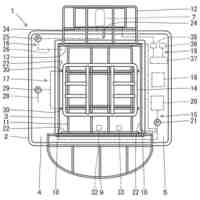
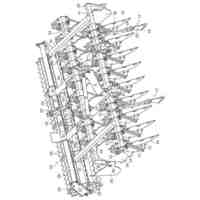
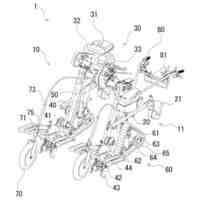
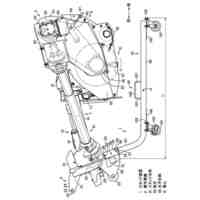
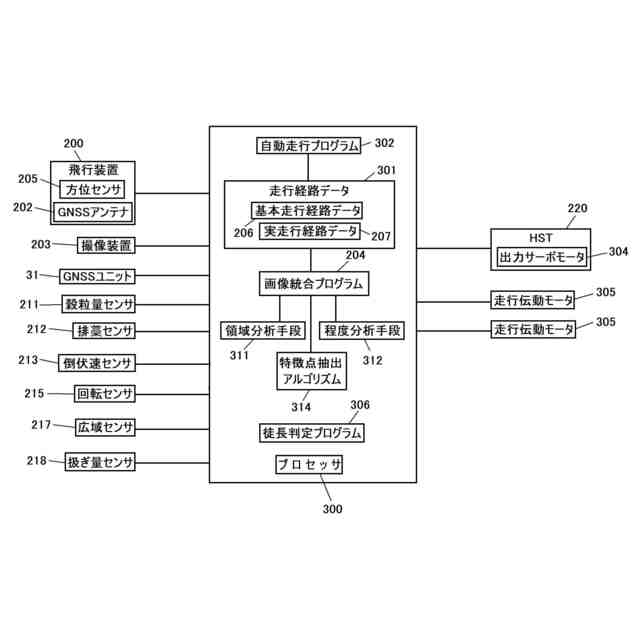
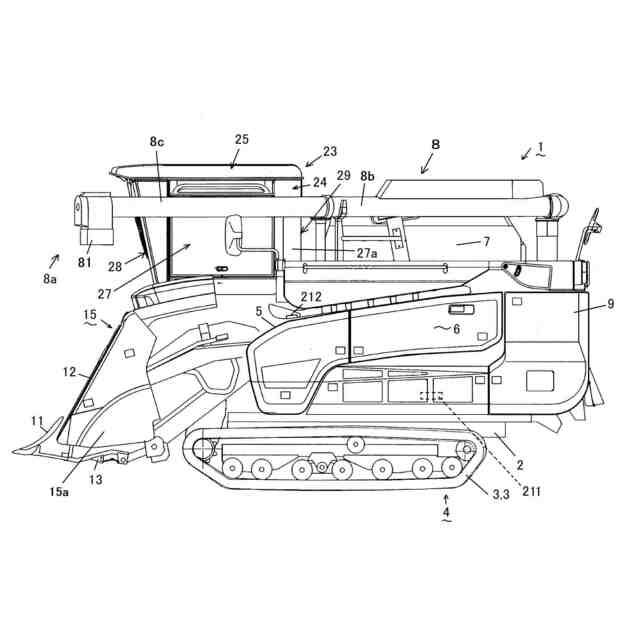
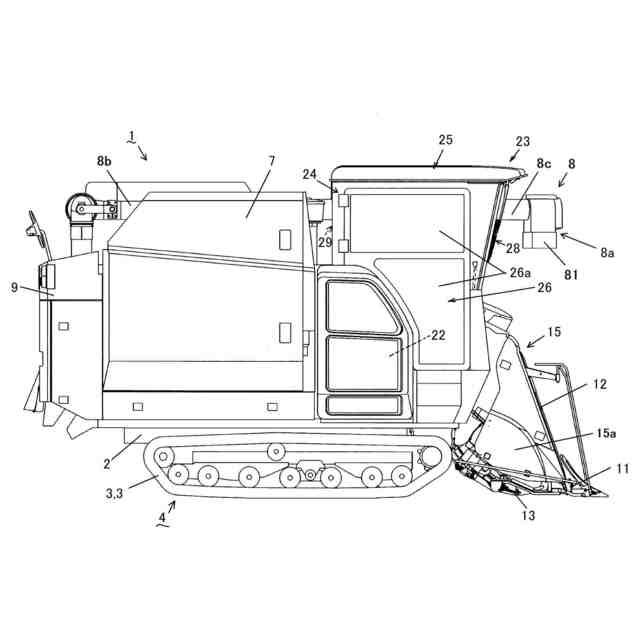
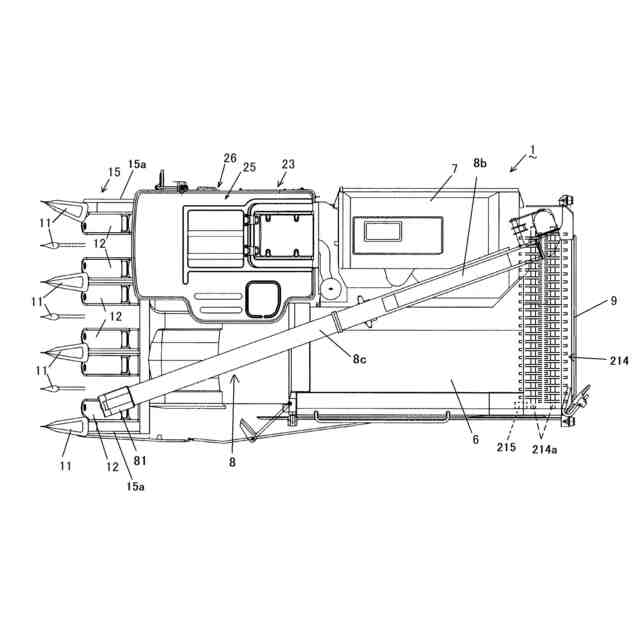
機体に走行装置4と、刈取装置15と、脱穀装置6と、設定された経路に従い機体を走行させる走行プログラム302を設け、飛行装置200に設ける撮像装置201で圃場画像203を取得し、領域分析手段311により圃場画像203から穀稈が存在しない圃場外領域を除外すると共に、程度分析手段312や方向分析手段313を用いて穀稈の倒伏の度合いと方向を算出して圃場画像203に補正を加え、補正された圃場画像203に基づき、適切な方向から刈取装置15により倒伏した穀稈を刈取収穫する走行経路を含んだ走行経路データ301を算出し、走行経路データ301に基づき走行プログラム302を作動させる制御装置300を備える構成とする。
【選択図】図14
特許請求の範囲
【請求項1】
走行装置(4)で走行する機体に穀稈を刈取収穫する刈取装置(15)を設け、該刈取装置(15)で刈り取った穀稈から穀粒を分離する脱穀装置(6)と、設定された経路に従い機体を走行させる走行プログラム(302)を設け、
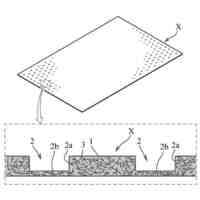
飛行装置(200)に設ける撮像装置(201)で圃場画像(203)を取得し、領域分析手段(311)により該圃場画像(203)から穀稈が存在しない圃場外領域を除外すると共に、程度分析手段(312)や方向分析手段(313)を用いて穀稈の倒伏の度合いと方向を算出して圃場画像(203)に補正を加え、
補正された前記圃場画像(203)に基づき、適切な方向から前記刈取装置(15)により倒伏した穀稈を刈取収穫する走行経路を含んだ走行経路データ(301)を算出し、該走行経路データ(301)に基づき前記走行プログラム(302)を作動させる制御装置(300)を備えることを特徴とする収穫作業機の走行経路生成装置。
続きを表示(約 770 文字)
【請求項2】
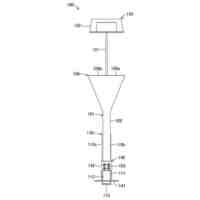
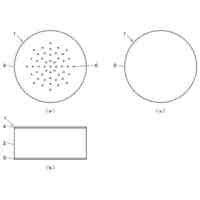
前記飛行装置(200)には、GNSSアンテナ(202)を設け、前記撮像装置(201)が撮影を行った位置情報を画像データに組み込むと共に、方位センサ(205)を設け、前記撮像装置(201)で撮影する画像の上部側が北となる姿勢に前記飛行装置(200)を向けるものとし、
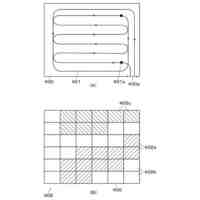
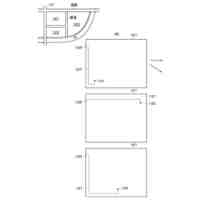
前記撮像装置(201)で取得した画像データが圃場全体を収めていないものは、部分画像(203a)として記録し、複数の該部分画像(203a)を、画像統合プログラム(204)により組み合わせて前記圃場画像(203)を作成するものとし、
該画像統合プログラム(204)で複数の前記部分画像(203a)を組み合わせるときは、画像データの位置座標から各部分画像(203a)の配置を決定すると共に、各々特徴点抽出アルゴリズム(314)を用いて前記部分画像(203a)から特徴点(S)を抽出し、複数の特徴点(S)の合致スコアの高い部分は重複箇所と判定し、一つの前記圃場画像(203)として生成することを特徴とする請求項1に記載の収穫作業機の走行経路生成装置。
【請求項3】
前記程度分析手段(312)により算出された穀稈の倒伏は複数の段階に分類して記録し、
前記刈取装置(15)による刈取作業時の方向が制限される倒伏と判定されたものだけを前記走行経路データ(301)の算出に使用することを特徴とする請求項1に記載の収穫作業機の走行経路生成装置。
【請求項4】
前記走行プログラム(302)には、収穫した穀粒を排出する圃場位置を入力可能とし、排出位置が入力されると、前記走行経路データ(301)に排出位置までの往復経路が追加されることを特徴とする請求項1から3のいずれか1項に記載の収穫作業機の走行経路生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、収穫作業機による穀稈の刈取走行経路を算出する走行経路生成装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、圃場内をプログラムに基づき自動刈取走行し、グレンタンク内の穀粒貯留量が一定量を超えると排出位置まで自動移動し、排出後に走行経路に自動的に復帰して刈取作業を継続するコンバインがある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023- 27377号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
穀粒の排出作業を含めた自動作業走行プログラムにより、作業者がコンバインを操縦する必要がなくなるので、穀稈の刈取作業の省力化、無人化が図られる。
【0005】
しかしながら、自動走行プログラムは、圃場の外周での刈取走行中に取得した位置情報を基に、直進しながら穀稈を刈り取る作業走行経路と、次の直進走行ラインへ移動する旋回走行経路を組み合わせて自動走行経路を算出するものであり、穀稈が倒伏しているかどうかや、倒伏度合いは考慮されていない。
【0006】
倒伏度合いが大きい穀稈は、コンバインの進行方向や走行速度によっては、十分に引き起こされずに大量の穀稈が搬送経路に入り込み、詰まりを生じさせて刈取作業を停止させてしまう問題がある。
【0007】
したがって、穀稈の倒伏が発生している箇所では、自動走行プログラムを用いず、作業者が操縦を行う必要が生じるので、十分な省力化が図れない問題がある。
【0008】
本発明は、上記に鑑みてなされたものであって、穀稈の倒伏状態等の圃場内の情報を含めて、穀稈の詰まりの発生を抑えつつ能率的な走行経路を算出できる収穫作業機の走行経路生成装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1記載の発明は、走行装置(4)で走行する機体に穀稈を刈取収穫する刈取装置(15)を設け、該刈取装置(15)で刈り取った穀稈から穀粒を分離する脱穀装置(6)と、設定された経路に従い機体を走行させる走行プログラム(302)を設け、飛行装置(200)に設ける撮像装置(201)で圃場画像(203)を取得し、領域分析手段(311)により該圃場画像(203)から穀稈が存在しない圃場外領域を除外すると共に、程度分析手段(312)や方向分析手段(313)を用いて穀稈の倒伏の度合いと方向を算出して圃場画像(203)に補正を加え、補正された前記圃場画像(203)に基づき、適切な方向から前記刈取装置(15)により倒伏した穀稈を刈取収穫する走行経路を含んだ走行経路データ(301)を算出し、該走行経路データ(301)に基づき前記走行プログラム(302)を作動させる制御装置(300)を備えることを特徴とする収穫作業機の走行経路生成装置である。
【0010】
請求項2記載の発明は、前記飛行装置(200)には、GNSSアンテナ(202)を設け、前記撮像装置(201)が撮影を行った位置情報を画像データに組み込むと共に、方位センサ(205)を設け、前記撮像装置(201)で撮影する画像の上部側が北となる姿勢に前記飛行装置(200)を向けるものとし、前記撮像装置(201)で取得した画像データが圃場全体を収めていないものは、部分画像(203a)として記録し、複数の該部分画像(203a)を、画像統合プログラム(204)により組み合わせて前記圃場画像(203)を作成するものとし、該画像統合プログラム(204)で複数の前記部分画像(203a)を組み合わせるときは、画像データの位置座標から各部分画像(203a)の配置を決定すると共に、各々特徴点抽出アルゴリズム(314)を用いて前記部分画像(203a)から特徴点(S)を抽出し、複数の特徴点(S)の合致スコアの高い部分は重複箇所と判定し、一つの前記圃場画像(203)として生成することを特徴とする請求項1に記載の収穫作業機の走行経路生成装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
苗キャップ
1か月前
個人
播種機
11日前
個人
尿処理材
26日前
株式会社アテックス
草刈機
1か月前
個人
水耕栽培システム
1か月前
個人
室内栽培システム
7日前
井関農機株式会社
圃場作業機
今日
有限会社マイク
囲い罠
4日前
井関農機株式会社
コンバイン
4日前
株式会社シマノ
釣り具
4日前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
圃場管理装置
26日前
株式会社西部技研
空調システム
1か月前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
圃場管理装置
18日前
井関農機株式会社
圃場管理装置
12日前
井関農機株式会社
移植機
11日前
井関農機株式会社
作業車両
11日前
株式会社シマノ
釣竿
28日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
26日前
株式会社ダイイチ
海苔網の酸処理船
7日前
個人
ペット用歯磨き用具セット
1か月前
株式会社山田鉄工
海苔網処理船
7日前
ダイハツ工業株式会社
草刈り機
1か月前
株式会社山田鉄工
海苔網処理船
7日前
株式会社山田鉄工
海苔網処理船
7日前
井関農機株式会社
作業車両
26日前
合同会社小林知財研鑽処
液体空気散布船
1か月前
三菱マヒンドラ農機株式会社
耕耘作業機
28日前
関東農機株式会社
ロータリ管理機
1か月前
大栄工業株式会社
誘引剤収容容器
5日前
松山株式会社
スタンド装置
11日前
株式会社クボタ
作業車
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ