TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101415
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218253
出願日
2023-12-25
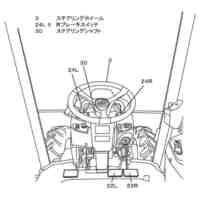
発明の名称
作業車両の遠隔操作システム
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250630BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】複数の作業車両を一人の運転者が安全に操作できるようにする。
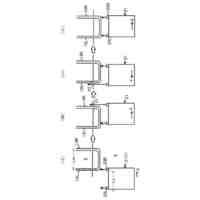
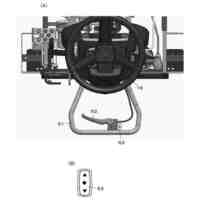
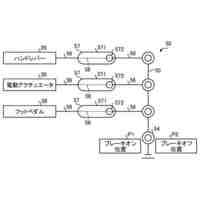
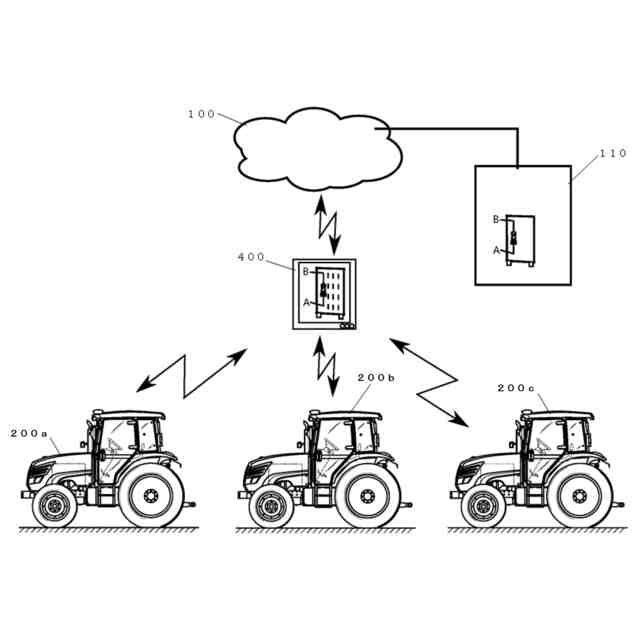
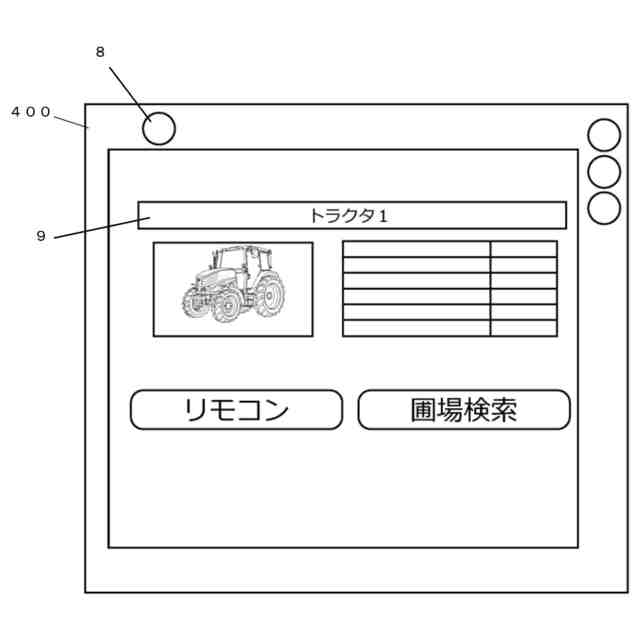
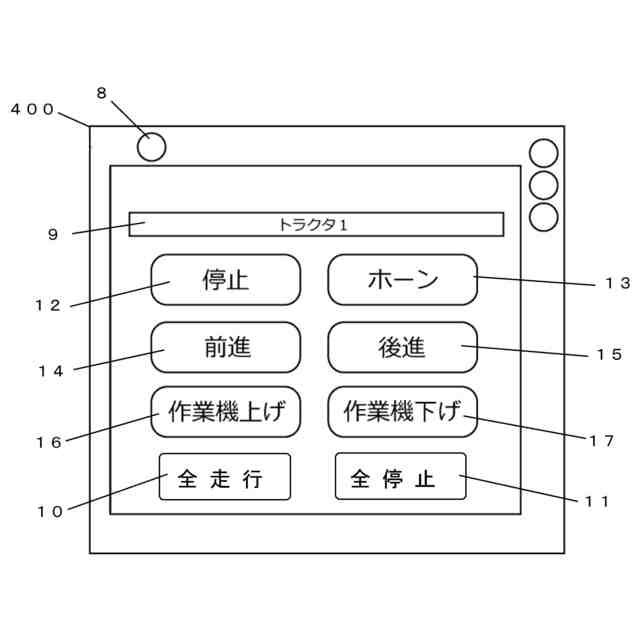
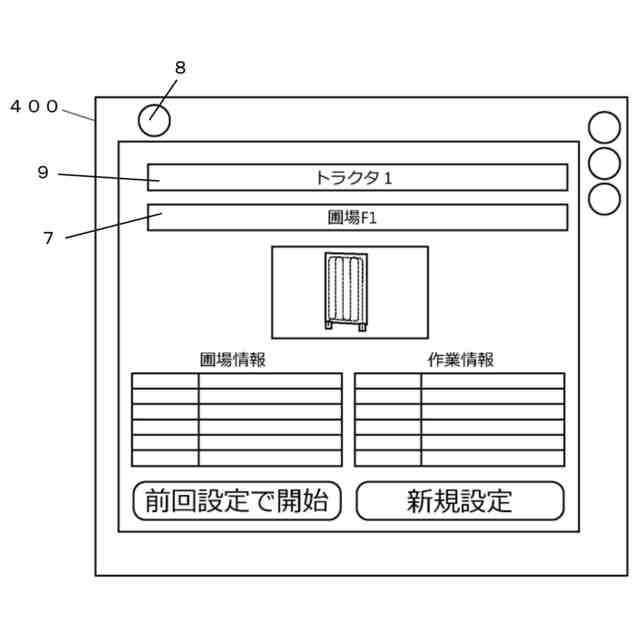
【解決手段】複数の作業車両200a,200b,200cに対して個別機体を指定して制御信号を送信する遠隔操縦装置400を備え、該遠隔操縦装置400は操作可能な機能を表示する表示部311を備え、操作対象とする前記作業車両200a,200b,200cを選択可能に構成するとともに、選択された前記作業車両200a,200b,200cに応じて操作可能な機能を特定する表示が切り替わることを特徴とする作業車両の遠隔操作システム。
【選択図】図2
特許請求の範囲
【請求項1】
複数の作業車両(200a),(200b),(200c)に対して個別機体を指定して制御信号を送信する遠隔操縦装置(310)を備え、
該遠隔操縦装置(310)は操作可能な機能を表示する表示部(311)を備え、
操作対象とする前記作業車両(200a),(200b),(200c)を選択可能に構成するとともに、選択された前記作業車両(200a),(200b),(200c)に応じて操作可能な機能を特定する表示が切り替わることを特徴とする作業車両の遠隔操作システム。
続きを表示(約 260 文字)
【請求項2】
前記遠隔操縦装置(310)は所定の可動域で操作される操作入力装置(312)を備え、選択された前記作業車両(200a),(200b),(200c)に応じて操作入力装置の操作位置に対する出力値を変更することを特徴とする請求項1に記載の作業車両の遠隔操作システム。
【請求項3】
前記遠隔操縦装置(310)により、選択された前記作業車両(200a),(200b),(200c)に適合しない操作が行われた場合、運転者に報知することを特徴とする請求項1または2に記載の作業車両の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の作業車両を遠隔操作する遠隔操作システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1のように、機体の操縦者が乗車せずに無線で操縦する無人土木作業車があるが、この無人土木作業車は、操縦者が安全な位置に居て遠隔操縦装置で操縦できる。
【先行技術文献】
【特許文献】
【0003】
特開平10-312214号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
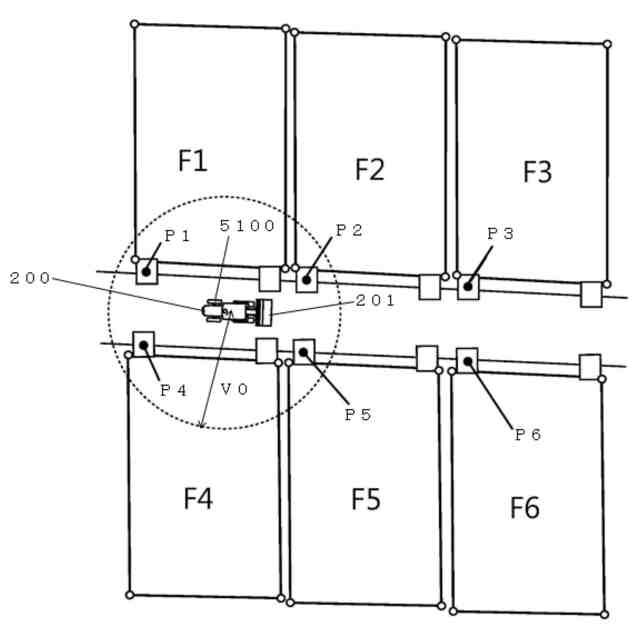
前記の無人土木作業車は、遠隔操縦を行う専任の操縦者がいる。しかし、広い農場で複数の作業車両を使用する場合は、一人の作業者が複数の作業機を操縦できるようにすると、作業効率が良くなる。
【0005】
本発明は、複数の作業車両を一人の運転者が安全に操作できるようにすることが課題である。
【課題を解決するための手段】
【0006】
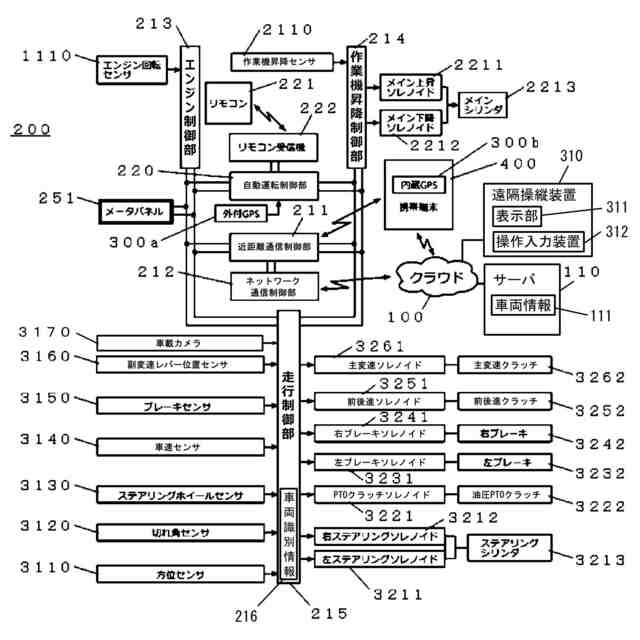
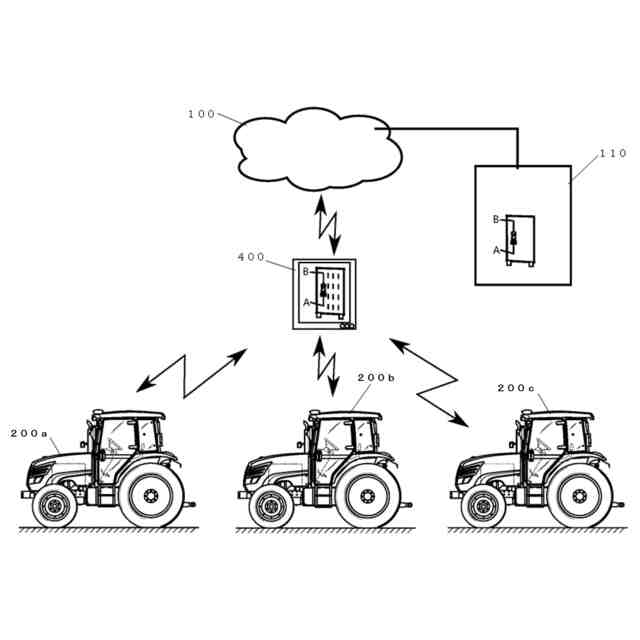
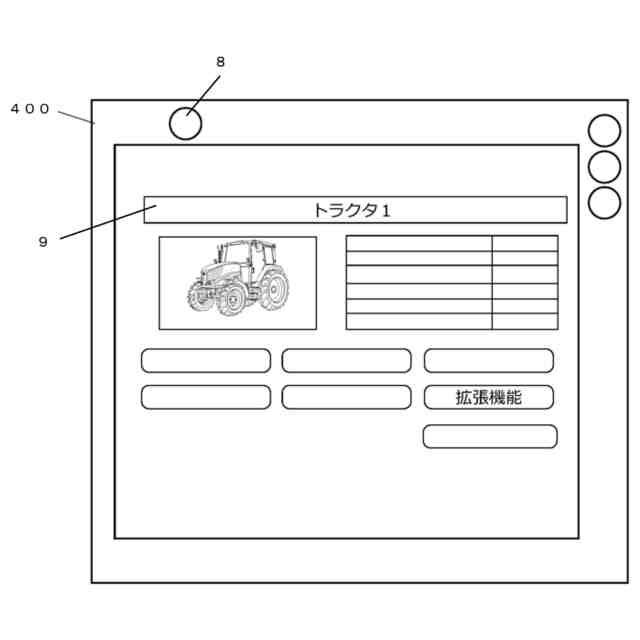
上記本発明の課題を解決するために第1の発明は、複数の作業車両(200a),(200b),(200c)に対して個別機体を指定して制御信号を送信する遠隔操縦装置(400)を備え、該遠隔操縦装置(400)は操作可能な機能を表示する表示部(311)を備え、操作対象とする前記作業車両(200a),(200b),(200c)を選択可能に構成するとともに、選択された前記作業車両(200a),(200b),(200c)に応じて操作可能な機能を特定する表示が切り替わることを特徴とする。
【0007】
第1の発明によると、一つの遠隔操縦装置(400)によって、複数の作業車両(200a),(200b),(200c)を操作するときに、操作可能な機能を特定する表示が切り替わることで運転者が迷うことなく機能を操作できるため、安全に操作できる。
【0008】
第2の発明は、第1の発明において、前記遠隔操縦装置(400)は所定の可動域で操作される操作入力装置(312)を備え、選択された前記作業車両(200a),(200b),(200c)に応じて操作入力装置の操作位置に対する出力値を変更することを特徴とする。
【0009】
第2の発明によると、第1の発明による効果に加えて操作入力装置(312)による操作を適切に操作対象の作業車両に反映させることにより、無理な出力を防いで破損を防止できるなど安全に操作できる。
【0010】
第3の発明は、第1または第2の発明において、前記遠隔操縦装置(400)により、選択された前記作業車両(200a),(200b),(200c)に適合しない操作が行われた場合、運転者に報知することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
移植機
2か月前
井関農機株式会社
田植機
27日前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
調製設備
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
苗移植機
2か月前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ