TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103217
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220429
出願日
2023-12-27
発明の名称
トラッキング装置、トラッキング方法及びプログラム
出願人
国立大学法人大阪大学
代理人
弁理士法人 楓国際特許事務所
主分類
G06T
7/215 20170101AFI20250702BHJP(計算;計数)
要約
【課題】複数の歩行者の点群が合体して観測されても正確なトラッキングが継続可能となる。
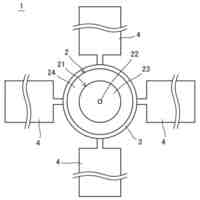
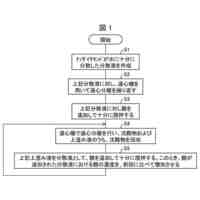
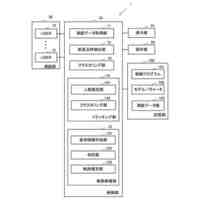
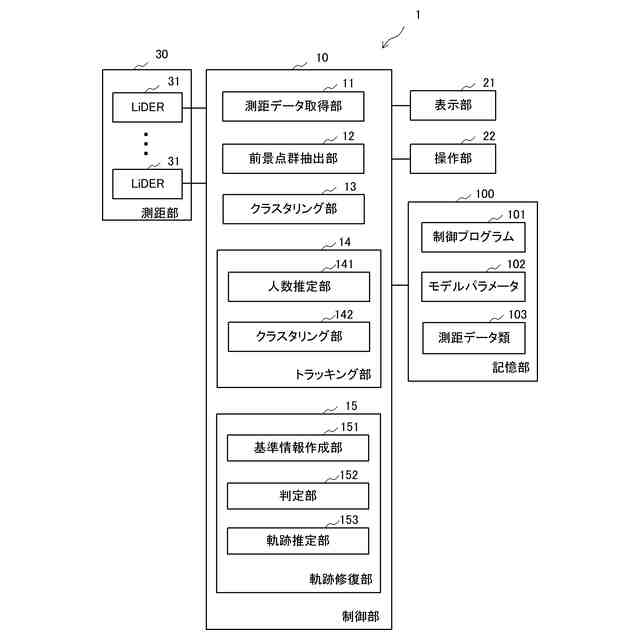
【解決手段】トラッキング装置1は、2台のLiDER31でフ周期的に取得される点群データを取り込み、点群の密度に応じて歩行者毎のセグメントに区分けし、各観測位置を取得するクラスタリング部13と、今周期に取得された各セグメントの歩行者の観測位置と、追跡対象の歩行者毎のオブジェクトにおける前周期での予測位置を用いて算出された今周期の予測位置とが最小距離となるセグメントとオブジェクトとを対応付け、対応付けされたオブジェクトに対してフィルタによるトラッキング処理を施すトラッキング部14とを備える。トラッキング部14は、セグメントとオブジェクトとの対応付けが不整合と判断した場合、当該セグメント内の人数を推定するCNNモデル141と、当該セグメントを推定人数分に分割するK-Meansクラスタリング部142とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
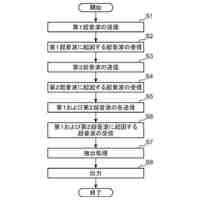
観測領域を有する少なくとも1個の測距装置で周期的に取得される計測用の点群データを取り込み、前記点群データの点群密度に基づいて歩行者毎のセグメントに区分けするクラスタリングと、その観測位置を取得する第1のクラスタリング手段と、
今回取得された各セグメントの歩行者の観測位置と、追跡対象の歩行者毎のオブジェクトにおける前回の予測位置を用いて算出された今回の予測位置とが最小距離となるセグメントとオブジェクトとを対応付け、かつ対応付けされたオブジェクトに対してフィルタを用いたトラッキング処理を施すトラッキング手段とを備え、
前記トラッキング手段は、
セグメントとオブジェクトとの対応付けが不整合と判断した場合、当該セグメントに含まれる人数を推定する人数推定手段と、
当該セグメントを推定人数分に分割する第2のクラスタリング手段とを備えたトラッキング装置。
続きを表示(約 1,200 文字)
【請求項2】
前記人数推定手段は、当該セグメントに複数の歩行者が合体したと見なせる場合を前記不整合と判断する請求項1に記載のトラッキング装置。
【請求項3】
前記人数推定手段は、対応付けの対象となるオブジェクトの予測位置が対応付けの終了したセグメントの位置情報と一致した場合を前記不整合と判断する請求項2に記載のトラッキング装置。
【請求項4】
前記人数推定手段は、学習済みのCNNモデルである請求項1に記載のトラッキング装置。
【請求項5】
前記CNNモデルは、3次元点群データを少なくとも水平面を含む複数の2次元面に分解し、各面で人数の推定を行うと共に、各面からの推定人数に重みを付して出力する請求項4に記載のトラッキング装置。
【請求項6】
前記第2のクラスタリング手段は、K-Means法によるクラスタリングを行う請求項1に記載のトラッキング装置。
【請求項7】
請求項1に記載のトラッキング装置と、前記取得した点群データを前記第1のクラスタリング手段に出力する測距装置を備えたトラッキング装置。
【請求項8】
軌跡修復手段を備え、
前記測距装置は、複数個を有し、それぞれの部分軌跡を得る観測領域が分散されており、
前記軌跡修復手段は、
各歩行者の点群の特徴量の類似性、歩行者の部分軌跡の空間的整合性、同軌跡の時間的整合性、および拡散モデルを用いた軌跡接合の4つの基準に対応する情報を作成する基準情報作成手段と、
作成された情報に基づいて歩行者を再識別する判定手段と、
判定結果に基づいて非観測域内の軌跡を推定する軌跡推定手段とを備える請求項1に記載のトラッキング装置。
【請求項9】
コンピュータが、
観測領域を有する少なくとも1個の測距装置で周期的に取得される計測用の点群データを取り込み、前記点群データの点群密度に基づいて歩行者毎のセグメントに区分けするクラスタリングと、その観測位置を取得する第1のクラスタリングステップと、
今回取得された各セグメントの歩行者の観測位置と、追跡対象の歩行者毎のオブジェクトにおける前回の予測位置を用いて算出された今回の予測位置とが最小距離となるセグメントとオブジェクトとを対応付け、かつ対応付けされたオブジェクトに対してフィルタを用いたトラッキング処理を施すトラッキングステップとを備え、
前記トラッキングステップは、セグメントとオブジェクトとの対応付けが不整合と判断した場合、当該セグメントに含まれる人数を推定する人数推定ステップと、当該セグメントを推定人数分に分割する第2のクラスタリングステップを備えたトラッキング方法。
【請求項10】
コンピュータを、請求項1~8のいずれかに記載のトラッキング装置として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、観測領域を有する測距装置で取得される歩行者の点群データを利用して歩行者のトラッキングを行う技術に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
近年、公共施設や商業施設など様々な人々が行きかう空間においては、突発的な事故への対応や人の位置や行動を理解してサービスの向上に資する上での人流検知の需要が高まっている。ところで、画像処理技術の飛躍的な発展により、近年ではRGB動画像などから人物を検出するシステムや手法も数多いものの、それらは基本的に顔などの個人情報を含む情報を直接取得するものであることから、利用後ただちに廃棄される場合にも通行者のプライバシーへの不安を払拭することは難しい。また通行者からのオプトアウトの申立てに対応する必要があることや、大多数が納得する十分な説明や同意の取得など多くの作業が必要となることから、公共空間や準公共空間において画像による人流計測を実施することは障壁も多い。
【0003】
これに対し、物体への距離情報のみを取得する3次元測域センサ(LiDAR)や深度カメラなどの3次元距離センサを用いて、より低いプライバシーリスクで人物の存在や姿勢を検出する手法が注目を集めている。3次元測域センサは、赤外線パターンの照射とカメラ視差を用いる方法や、赤外線ビームのToF(Time of Flight)計測により、センサからの各方位に対し最も近い物体への距離を計測し、3次元点群を構成する。
【0004】
発明者らは、複数のLiDARにより捉えられた3次元点群データを用いて、都市部繁華街における歩行者トラッキング(軌跡導出)を行う手法を提案した(非特許文献1)。3次元点群を用いる人物検出手法の多くは定位置の人物の姿勢検出を目的としており、歩行者同士が視野を妨げる状況や、歩行者同士が接近し複数人の点群が同時に観測される状況は基本的に想定していない。一方、公共空間における人流検知では人物同士のオクルージョンや太陽光などにより、人物を捉えた点群情報は不完全であることが多い。非特許文献1の手法では、点群の欠損および複数人物の接近による点群の結合といった点群の不完全性による人物セグメントの検出(クラスタリング)失敗を考慮し、複数歩行者の点群が合体して単一のセグメントとして観測される場合および単一人物の点群が複数のセグメントとして観測される場合の2つの状況の推定とカルマンフィルタによるトラッキングを組み合わせることで、より堅牢なトラッキングを実現している。
【先行技術文献】
【非特許文献】
【0005】
R. Ukyoh, T. Amano, A. Hiromori, H. Yamaguchi, and T. Higashino, 公共空間における三次元点群の不完全性に対して堅牢な歩行者トラッキング手法. 情報処理学会論文誌, Vol. 63, No. 8, pp. 1361-1370, Aug 2022.
【発明の概要】
【発明が解決しようとする課題】
【0006】
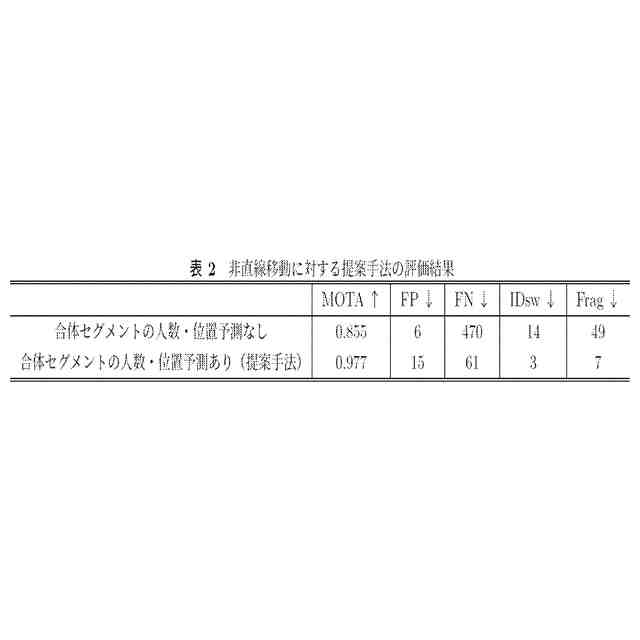
しかしながら、非特許文献1の手法では、歩行者は等速に直進するという前提にて複数の歩行者の点群が結合(合体)して観測された際の移動予測を行っているため、結合した点群が観測されている際に不規則な移動を行うと正確なトラッキングを継続することが容易でなくなるという課題がある。
【0007】
本発明は、上記に鑑みてなされたもので、適時にセグメント内の人数を推定してクラスタリングをやり直すことで、より正確なトラッキングを継続可能にするトラッキング装置、トラッキング方法及びプログラムを提供するものである。
【課題を解決するための手段】
【0008】
本発明に係るトラッキング装置は、観測領域を有する少なくとも1個の測距装置で周期的に取得される計測用の点群データを取り込み、前記点群データの点群密度に基づいて歩行者毎のセグメントに区分けするクラスタリングと、その観測位置を取得する第1のクラスタリング手段と、今回取得された各セグメントの歩行者の観測位置と、追跡対象の歩行者毎のオブジェクトにおける前回の予測位置を用いて算出された今回の予測位置とが最小距離となるセグメントとオブジェクトとを対応付け、かつ対応付けされたオブジェクトに対してフィルタを用いたトラッキング処理を施すトラッキング手段とを備え、前記トラッキング手段は、セグメントとオブジェクトとの対応付けが不整合と判断した場合、当該セグメントに含まれる人数を推定する人数推定手段と、当該セグメントを推定人数分に分割する第2のクラスタリング手段とを備えたものである。
【0009】
また、本発明に係るトラッキング方法は、コンピュータが、観測領域を有する少なくとも1個の測距装置で周期的に取得される計測用の点群データを取り込み、前記点群データの点群密度に基づいて歩行者毎のセグメントに区分けするクラスタリングと、その観測位置を取得する第1のクラスタリングステップと、今回取得された各セグメントの歩行者の観測位置と、追跡対象の歩行者毎のオブジェクトにおける前回の予測位置を用いて算出された今回の予測位置とが最小となるセグメントとオブジェクトとを対応付け、かつ対応付けされたオブジェクトに対してフィルタを用いたトラッキング処理を施すトラッキングステップとを備え、前記トラッキングステップは、セグメントとオブジェクトとの対応付けが不整合と判断した場合、当該セグメントに含まれる人数を推定する人数推定ステップと、当該セグメントを推定人数分に分割する第2のクラスタリングステップを備えたものである。
【0010】
また、本発明に係るプログラムは、コンピュータを、前記トラッキング装置として機能させるためのものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人大阪大学
細胞シート
2か月前
国立大学法人大阪大学
原子力発電装置
3か月前
国立大学法人大阪大学
発光タンパク質
4か月前
国立大学法人大阪大学
内視鏡システム
2か月前
国立大学法人大阪大学
眼瞼痙攣緩和具
1か月前
国立大学法人大阪大学
漏洩情報抑制回路
1か月前
トヨタ自動車株式会社
電池
2か月前
大和ハウス工業株式会社
反応装置
3か月前
国立大学法人大阪大学
コネクタ取付具およびコネクタ部材
4か月前
国立大学法人大阪大学
光発電システムの出力電力特性の最適化
4か月前
日本電信電話株式会社
量子鍵配送装置
4か月前
株式会社神戸製鋼所
ねじり疲労評価方法
2か月前
国立大学法人大阪大学
ナノダイヤモンドの製造方法および製造装置
2か月前
株式会社トクヤマ
ケトン誘導体の製造方法
1か月前
株式会社ジャパンディスプレイ
液晶光学素子
2か月前
日東紡績株式会社
二酸化炭素の吸収又は脱着剤
23日前
株式会社塚田メディカル・リサーチ
カテーテル
2か月前
国立大学法人大阪大学
セミクラスレートハイドレートおよびその製造方法
2か月前
国立大学法人大阪大学
治具、システム、方法及びコンピュータプログラム
2か月前
株式会社神戸製鋼所
超音波送受信方法および該装置
3か月前
国立大学法人大阪大学
トラッキング装置、トラッキング方法及びプログラム
1か月前
三菱重工業株式会社
劣化診断方法および劣化診断装置
2か月前
エヌ・イーケムキャット株式会社
還元的アミノ化触媒
1か月前
株式会社ダイセル
金属ペースト、及び接合体の製造方法
2か月前
株式会社マンダム
皮膚疾患抑制剤のスクリーニング方法
3か月前
国立大学法人大阪大学
医用情報処理装置、医用情報処理方法、およびプログラム
4か月前
国立大学法人大阪大学
メタネーションのための触媒およびメタンを製造する方法
4か月前
株式会社塚田メディカル・リサーチ
バルーンカテーテル
2か月前
大成建設株式会社
汚泥処理方法および汚泥処理システム
1日前
株式会社サイバーエージェント
対話システム及び制御方法
1か月前
株式会社 TL Genomics
キメリズムの解析方法
3か月前
NTT株式会社
周期検出装置、周期検出方法及びプログラム
1日前
株式会社塚田メディカル・リサーチ
センサ、及びカテーテル
2か月前
日本電信電話株式会社
多者間量子鍵配送システムおよび方法
2か月前
国立大学法人東京科学大学
メタン製造方法及びメタン製造装置
2か月前
日東紡績株式会社
芳香族系化合物が導入されたポリアリルアミン
23日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ