TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107080
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000837
出願日
2024-01-05
発明の名称
ロボット制御システム、ロボット制御装置、制御方法、及び、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
B25J
9/22 20060101AFI20250710BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のタスクを連結するマニピュレータの経路動作を生成する技術を提供する。
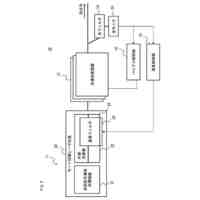
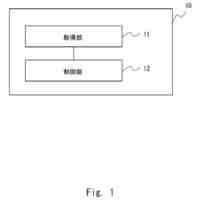
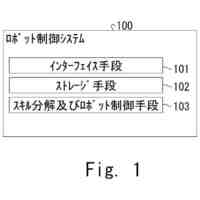
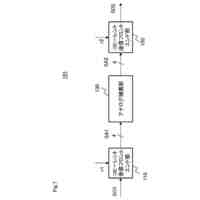
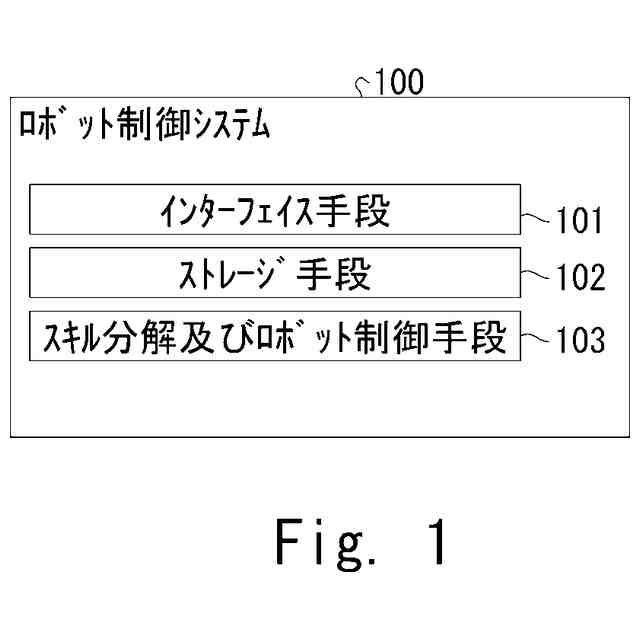
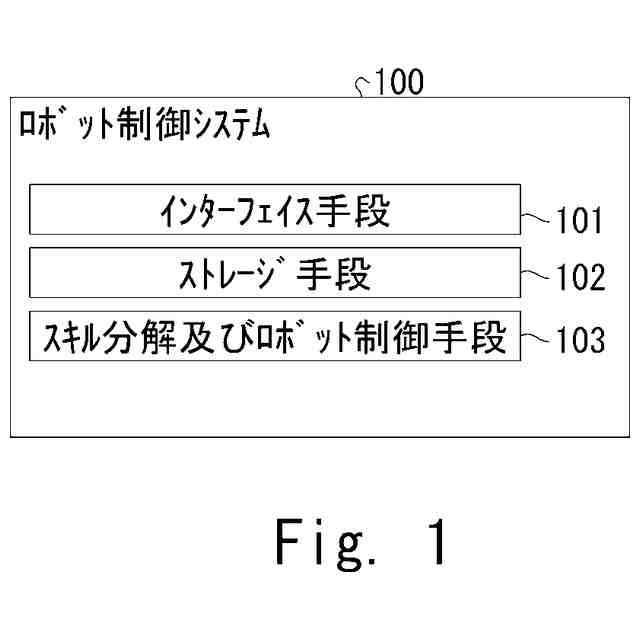
【解決手段】インターフェイス手段101は、予め規定された複数のスキルを任意に組み合わせる。インターフェイス手段101は、複数のスキルが保持するパラメータを調整する。インターフェイス手段101は、ロボットに行わせる仕事を定義する。ストレージ手段102は、ロボットが仕事を行う対象物の情報を保持する。ストレージ手段102は、複数のスキルのパラメータの初期値を提供する。スキル分解及びロボット制御手段103は、インターフェイス手段101から入力された複数のスキルの組み合わせを分解する。スキル分解及びロボット制御手段103は、ロボットを制御する最適な命令列を生成する。スキル分解及びロボット制御手段103は、当該命令列を用いてロボットを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義するインターフェイス手段と、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供するストレージ手段と、
前記インターフェイス手段から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、スキル分解及びロボット制御手段と、
を含む、
ロボット制御システム。
続きを表示(約 910 文字)
【請求項2】
前記複数のスキルのパラメータの調整は、オペレータが、前記スキル分解及びロボット制御手段が生成した前記命令列の動作を確認しながら前記複数のスキルのパラメータに対する相対的な補正値を入力することで行う、
請求項1に記載のロボット制御システム。
【請求項3】
前記複数のスキルは、溶接スキルを含む、
請求項1に記載のロボット制御システム。
【請求項4】
前記溶接スキルのパラメータは、溶接位置、溶接角度、溶接温度のうち少なくとも何れか1つの物理量を示す、
請求項3に記載のロボット制御システム。
【請求項5】
前記複数のスキルは、ブロースキルを含む、
請求項1に記載のロボット制御システム。
【請求項6】
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義するインターフェイス手段と、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供するストレージ手段と、
前記インターフェイス部から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、スキル分解及びロボット制御手段と、
を含む、
ロボット制御装置。
【請求項7】
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義し、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供し、
前記インターフェイス部から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、
制御方法。
【請求項8】
コンピュータに、請求項7に記載の制御方法を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御システム、ロボット制御装置、制御方法、及び、プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ハンドラーロボットは、仕事をする手先としてのロボットハンド、ロボットハンドを支える複数の軸で接続された腕としてのロボットアーム、を含む。オペレータは、ロボットをティーチングするために、例えばロボットに接続されたiPad(登録商標)のようなパネルから個々の制御コマンドを入力する。個々の制御コマンドは、ロボットハンドを10cm上に動かすこと、次に右に20cm動かすこと、そして物体を把持すること、を含む。ここでロボットが行う仕事の対象物は製造や物流領域でそれぞれ異なる。このため、その対象物に対応する仕事のティーチングが個別に必要となる。例えば同じ製造でも車や半導体等製造する対象物でロボットに行わせる仕事は大きく異なる。
【0003】
ここでティーチングに時間がかかる作業の1つにロボットの細かな動きの微調整がある。ロボットに所望の仕事をさせるためには、ティーチングの試行錯誤が求められる。ティーチングの試行錯誤は、ロボットハンドの上下左右、奥行きの位置を微調整することを含む。ティーチングの試行錯誤は、ロボットハンドが移動する際にそれを支えるロボットアームが対象物と干渉しないように調整することを含む。ティーチングの試行錯誤は、ロボットハンドが同じ位置だったとしても、それを支えるロボットアームの軸同士の角度関係は複数考えられるためその関係性を調整することを含む。オペレータは、ティーチングの試行錯誤は、ロボットの実機を使いながら、所望の動作が得られるまで行う。さらに、ロボットが1つの対象物に行う作業は複数存在することが多い。オペレータは、複数の作業の取捨選択を行ったり、複数の作業間の順序を入れ替えたりする。このとき、オペレータは、意図した動きを実現するために、ロボットのハンドやアームの動きの再調整を行う。そのため、ロボットのティーチングには大きな時間のコストと高い技術力が必要となる。
【0004】
特許文献1は、ティーチングの手間を簡略化するためのロボット教示装置を開示している。
【先行技術文献】
【特許文献】
【0005】
特開2000-10618号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示の目的は、複数のタスク間をつなぐロボットアームの制御を提供することにある。
【課題を解決するための手段】
【0007】
本開示の第1の観点によれば、
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義するインターフェイス手段と、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供するストレージ手段と、
前記インターフェイス部から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、スキル分解及びロボット制御手段と、
を含む、
ロボット制御システムが提供される。
【0008】
本開示の第2の観点によれば、
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義するインターフェイス手段と、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供するストレージ手段と、
前記インターフェイス部から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、スキル分解及びロボット制御手段と、
を含む、
ロボット制御装置が提供される。
【0009】
本開示の第3の観点によれば、
予め規定された複数のスキルを任意に組み合わせ、前記複数のスキルが保持するパラメータを調整することで、ロボットに行わせる仕事を定義し、
前記ロボットが仕事を行う対象物の情報を保持することにより、前記複数のスキルのパラメータの初期値を提供し、
前記インターフェイス部から入力された前記複数のスキルの組み合わせを分解し、前記ロボットを制御する最適な命令列を生成し、当該命令列を用いて前記ロボットを制御する、
制御方法が提供される。
【発明の効果】
【0010】
本開示は、複数のタスク間をつなぐロボットアームの制御を提供する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
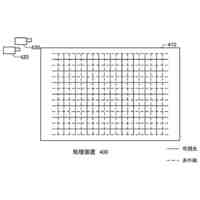
処理装置
17日前
日本電気株式会社
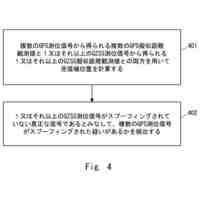
測位装置及びその方法
11日前
日本電気株式会社
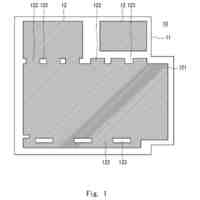
取付構造及び半導体部品
15日前
日本電気株式会社
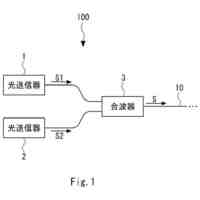
光通信システム及び光通信方法
18日前
日本電気株式会社
光送信器及び光送信器の制御方法
17日前
日本電気株式会社
超伝導デバイスおよびその製造方法
22日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
15日前
日本電気株式会社
配送管理装置、配送管理方法、及びプログラム
1日前
日本電気株式会社
情報提供装置、情報提供方法、及びプログラム
17日前
日本電気株式会社
測位方法、移動体、プログラム及び測位システム
9日前
日本電気株式会社
光通信システム、光信号制御方法及び光通信装置
10日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
10日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
17日前
日本電気株式会社
光ネットワークシステム、制御方法、プログラム
9日前
日本電気株式会社
管理装置、管理システム、管理方法、及びプログラム
17日前
日本電気株式会社
情報処理装置、可視化方法、及び、可視化プログラム
15日前
日本電気株式会社
通信システム、監視装置、監視方法、及びプログラム
8日前
日本電気株式会社
システム同定装置、システム同定方法及びプログラム
15日前
日本電気株式会社
情報処理装置、データ抽出方法、及びデータ抽出プログラム
16日前
日本電気株式会社
システム構成導出装置、システム構成導出方法及びプログラム
16日前
日本電気株式会社
超伝導量子回路、量子ビット、量子コンピュータ、及び製造方法
16日前
日本電気株式会社
方向推定装置、無線通信装置、方向推定方法、及び、プログラム
15日前
日本電気株式会社
漏洩検知システム、漏洩検知装置、漏洩検知方法、及びプログラム
18日前
日本電気株式会社
情報管理装置、情報管理システム、情報管理方法、およびプログラム
15日前
日本電気株式会社
通信制御装置、通信システム、通信制御プログラム、及び通信制御方法
9日前
日本電気株式会社
ロボット制御システム、ロボット制御装置、制御方法、及び、プログラム
1日前
日本電気株式会社
ベクトル分解器、光無線伝送システム、通信装置、及びベクトル分解方法
15日前
日本電気株式会社
回転駆動装置、回転駆動方法、回転駆動プログラム、およびアンテナ装置
9日前
日本電気株式会社
無線端末、基地局、及び方法
10日前
日本電気株式会社
光中継装置、及び光中継方法
17日前
日本電気株式会社
温室効果ガス排出量評価装置、温室効果ガス排出量評価方法、及びプログラム
11日前
日本電気株式会社
無線通信装置、無線通信システム、通信制御方法、及び、通信制御プログラム
8日前
日本電気株式会社
情報処理装置、情報処理方法及び記録媒体
8日前
日本電気株式会社
情報処理装置、情報処理方法および記憶媒体
15日前
日本電気株式会社
情報処理装置、情報処理方法及びプログラム
15日前
日本電気株式会社
情報処理システム、情報処理方法およびプログラム
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ