TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109844
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2025080144,2021182220
出願日
2025-05-12,2021-11-08
発明の名称
位置・力制御システム、位置・力制御装置、位置・力制御方法及びプログラム
出願人
トヨタ紡織株式会社
,
個人
,
モーションリブ株式会社
代理人
個人
主分類
A61H
7/00 20060101AFI20250717BHJP(医学または獣医学;衛生学)
要約
【課題】施術者がユーザに対して直接施術する場合のマッサージにより近い触覚を、マッサージを行う機器によって提示する。
【解決手段】位置・力制御システム1は、施術動作の入力を受け付ける1または複数のマスタ装置10と、施術動作を出力する1または複数のスレーブ装置20と、マスタ装置10及びスレーブ装置20を制御する制御装置30と、を含む。制御装置30は、マスタ装置10に入力された施術動作に対応する力触覚をスレーブ装置20に出力させるための制御パラメータをスレーブ装置20に送信し、スレーブ装置20が出力した施術動作に対する反力をマスタ装置10に出力させるための制御パラメータをマスタ装置10に送信する。
【選択図】図1
特許請求の範囲
【請求項1】
施術動作の入力を受け付け、前記施術動作に対する反力を出力する第1のアクチュエータを有する1または複数のマスタ装置と、
施術動作を出力する第2のアクチュエータを備える1または複数のスレーブ装置と、
前記マスタ装置及び前記スレーブ装置を制御する制御部と、を含み、
前記制御部は、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための制御パラメータを前記マスタ装置に送信し、
前記制御パラメータは、前記第1のアクチュエータまたは前記第2のアクチュエータにおける可動子の位置または当該可動子と連動する部材の位置を表すパラメータを含み、
前記制御部は、
前記第1のアクチュエータまたは前記第2のアクチュエータにおける前記可動子の位置または当該可動子と連動する部材の位置に基づいて施術動作の方向に入出力する力を算出することにより、位置と力とが対応付けられた制御を行い、
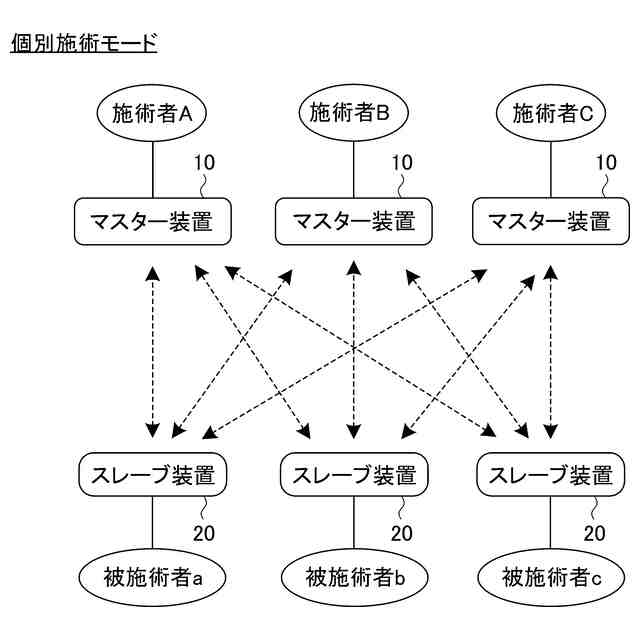
1つの前記マスタ装置と1つの前記スレーブ装置とが1対1の通信を行う個別施術モードと、1つの前記マスタ装置と複数の前記スレーブ装置とが1対多の通信を行う複数施術モードとのいずれかを実行し、
前記個別施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための前記制御パラメータを前記マスタ装置に送信し、
前記複数施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータを前記スレーブ装置に送信することを特徴とする位置・力制御システム。
続きを表示(約 2,700 文字)
【請求項2】
前記制御部は、前記スレーブ装置からのリクエストに示された1つの前記マスタ装置と、当該リクエストを行った複数の前記スレーブ装置とにおいて、前記複数施術モードを実行することを特徴とする請求項1に記載の位置・力制御システム。
【請求項3】
前記制御部は、前記複数施術モードにおいて、前記マスタ装置に入力された施術動作を正規化した前記制御パラメータとして、複数の前記スレーブ装置に送信することを特徴とする請求項1または2に記載の位置・力制御システム。
【請求項4】
前記スレーブ装置は、前記制御部から送信された前記正規化した制御パラメータに対し、当該スレーブ装置のユーザに応じた補正を行い、補正後の制御パラメータに基づいて、力触覚を出力することを特徴とする請求項3に記載の位置・力制御システム。
【請求項5】
前記スレーブ装置は、前記制御部から送信された制御パラメータが示す物理量が設定された上限を超えた場合、及び、前記制御部から前記制御パラメータを受信する通信状況が設定された状態より低下した場合の少なくともいずれかにおいて、ユーザへの作用を抑制するための予め設定された制御を実行することを特徴とする請求項1から4のいずれか1項に記載の位置・力制御システム。
【請求項6】
前記スレーブ装置は、記憶された前記制御パラメータを再生することにより、施術動作に対応する力触覚を出力することを特徴とする請求項1から5のいずれか1項に記載の位置・力制御システム。
【請求項7】
前記スレーブ装置は、施術されるユーザを押圧する押圧部材を備え、前記マスタ装置に入力された押圧動作の力触覚を、前記押圧部材を介して出力することを特徴とする請求項1から6のいずれか1項に記載の位置・力制御システム。
【請求項8】
前記スレーブ装置は、施術されるユーザを摩る摩り部材を備え、前記マスタ装置に入力された摩り動作のための操作に対応して、前記摩り部材を介して摩り動作を出力することを特徴とする請求項1から7のいずれか1項に記載の位置・力制御システム。
【請求項9】
施術動作の入力を受け付け、前記施術動作に対する反力を出力する第1のアクチュエータを有する1または複数のマスタ装置と、
施術動作を出力する第2のアクチュエータを備える1または複数のスレーブ装置と、
前記マスタ装置及び前記スレーブ装置を制御し、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための制御パラメータを前記マスタ装置に送信する制御部と、を含む位置・力制御システムにおけるスレーブ装置として構成される位置・力制御装置であって、
前記制御パラメータは、前記第1のアクチュエータまたは前記第2のアクチュエータにおける可動子の位置または当該可動子と連動する部材の位置を表すパラメータを含み、
前記第1のアクチュエータまたは前記第2のアクチュエータにおける前記可動子の位置または当該可動子と連動する部材の位置に基づいて施術動作の方向に入出力する力を算出することにより、位置と力とが対応付けられた制御が行われ、
1つの前記マスタ装置と1つの前記スレーブ装置とが1対1の通信を行う個別施術モードと、1つの前記マスタ装置と複数の前記スレーブ装置とが1対多の通信を行う複数施術モードとのいずれかが実行され、
前記個別施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータが前記スレーブ装置に送信され、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための前記制御パラメータが前記マスタ装置に送信され、
前記複数施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータが前記スレーブ装置に送信され、
施術動作の入力を受け付ける前記マスタ装置に入力された施術動作に対応する力触覚を表す前記制御パラメータに基づいて、前記施術動作に対応する力触覚を出力することを特徴とする位置・力制御装置。
【請求項10】
施術動作の入力を受け付け、前記施術動作に対する反力を出力する第1のアクチュエータを有する1または複数のマスタ装置と、
施術動作を出力する第2のアクチュエータを備える1または複数のスレーブ装置と、
前記マスタ装置及び前記スレーブ装置を制御する制御部と、を含む位置・力制御システムが実行する位置・力制御方法であって、
前記制御部が、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための制御パラメータを前記マスタ装置に送信する制御ステップを含み、
前記制御パラメータは、前記第1のアクチュエータまたは前記第2のアクチュエータにおける可動子の位置または当該可動子と連動する部材の位置を表すパラメータを含み、
前記制御ステップでは、
前記第1のアクチュエータまたは前記第2のアクチュエータにおける前記可動子の位置または当該可動子と連動する部材の位置に基づいて施術動作の方向に入出力する力を算出することにより、位置と力とが対応付けられた制御を行い、
1つの前記マスタ装置と1つの前記スレーブ装置とが1対1の通信を行う個別施術モードと、1つの前記マスタ装置と複数の前記スレーブ装置とが1対多の通信を行う複数施術モードとのいずれかを実行し、
前記個別施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための前記制御パラメータを前記マスタ装置に送信し、
前記複数施術モードでは、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための前記制御パラメータを前記スレーブ装置に送信することを特徴とする位置・力制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置・力制御システム、位置・力制御装置、位置・力制御方法及びプログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、ユーザの身体に対し、マッサージを施すマッサージチェアが知られている。
マッサージチェアは、例えば、背もたれに内蔵された押圧部材を移動させながら、ユーザの背中や肩等をマッサージする機能を備えており、マッサージ師等の施術者が行う施術に近いマッサージを行えるように種々の改良が重ねられている。
なお、特許文献1には、マッサージ動作に対する使用者の感覚を推定し、この推定された感覚に基づいて、マッサージ動作を使用者が好む方向に変更制御するマッサージ機に関する技術が記載されている。
特許文献1に記載された技術は、マッサージの進行に伴って変化する使用者の感覚に応じて効果的なマッサージを行うと共に、推定感覚の信頼性を向上させることを図るものである。
【先行技術文献】
【特許文献】
【0003】
特開2005-118126号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されたマッサージ機は、生理信号を検出する生理信号検出手段、検出された生理信号に基づいて、マッサージ動作に対する使用者の感覚を推定する感覚推定手段、及び、マッサージ動作の少なくとも変更制御を、使用者毎に履歴情報として記憶する履歴情報記憶手段等を備え、ユーザにとって心地良いと推定される効果的なマッサージ(触覚の提示)の実現を図るものである。
そのため、特許文献1に記載された技術においては、マッサージ機の推定結果に基づき、ユーザによって心地良いと推定されるマッサージ動作を行うことから、有資格者のセラピストやマッサージ師等の施術者が、ユーザの身体に触れて判断した場合に実行する施術内容とは異なる可能性が高い。
即ち、従来の技術においては、マッサージを行う機器によって、施術者がユーザに対して直接施術する場合のマッサージに近い触覚を提示することが困難であった。
【0005】
本発明は、施術者がユーザに対して直接施術する場合のマッサージにより近い触覚を、マッサージを行う機器によって提示することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様の位置・力制御システムは、
施術動作の入力を受け付ける1または複数のマスタ装置と、
施術動作を出力する1または複数のスレーブ装置と、
前記マスタ装置及び前記スレーブ装置を制御する制御部と、を含み、
前記制御部は、前記マスタ装置に入力された施術動作に対応する力触覚を前記スレーブ装置に出力させるための制御パラメータを前記スレーブ装置に送信し、前記スレーブ装置が出力した施術動作に対する反力を前記マスタ装置に出力させるための制御パラメータを前記マスタ装置に送信することを特徴とする。
【発明の効果】
【0007】
本発明によれば、施術者がユーザに対して直接施術する場合のマッサージにより近い触覚を、マッサージを行う機器によって提示することができる。
【図面の簡単な説明】
【0008】
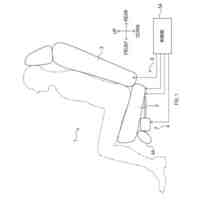
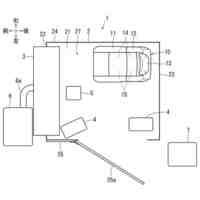
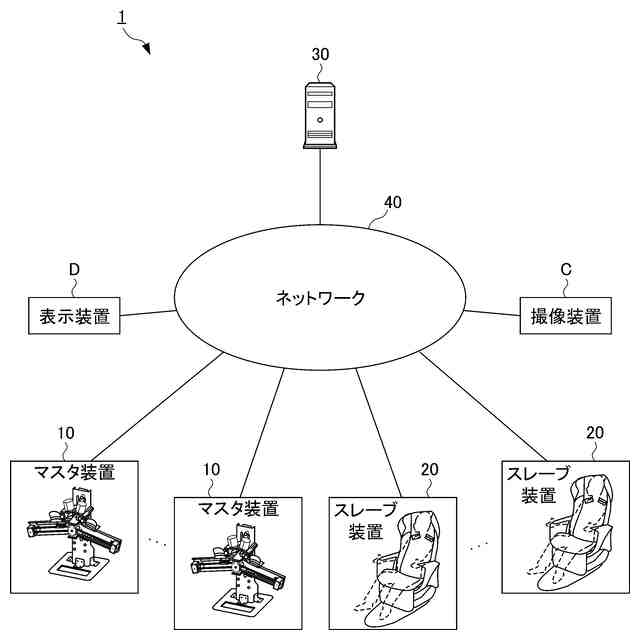
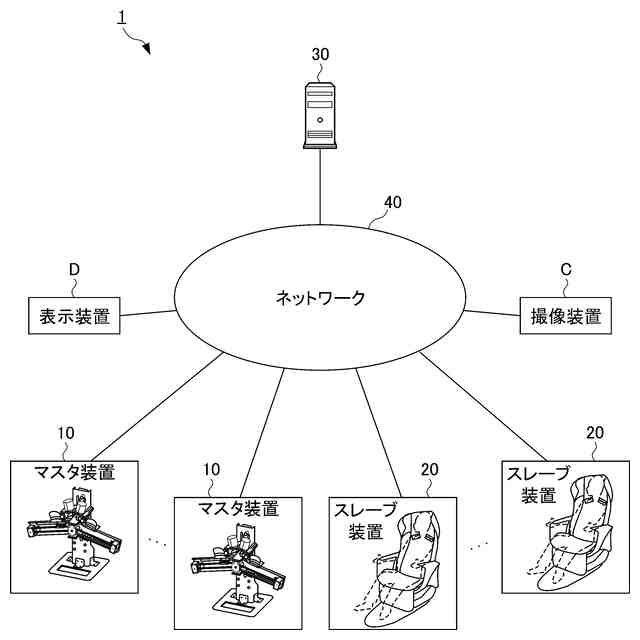
本発明の一実施形態に係る位置・力制御システム1のシステム構成を示す模式図である。
マスタ装置10の構成を示す模式図である。
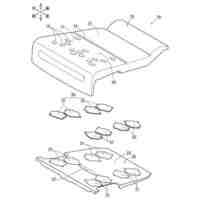
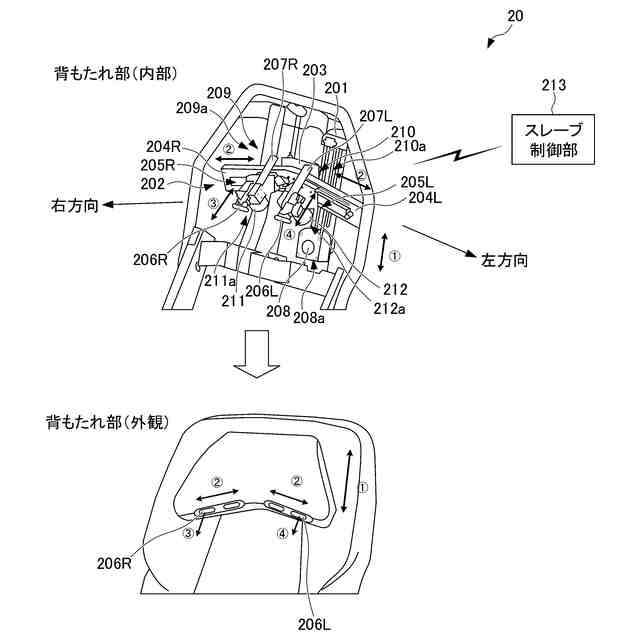
スレーブ装置20の構成を示す模式図である。
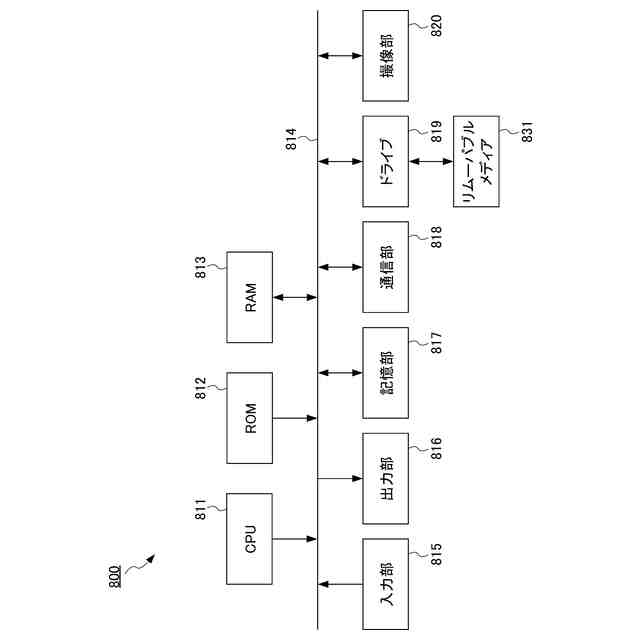
位置・力制御システム1において制御を行う機能部を構成する情報処理装置800のハードウェア構成を示す図である。
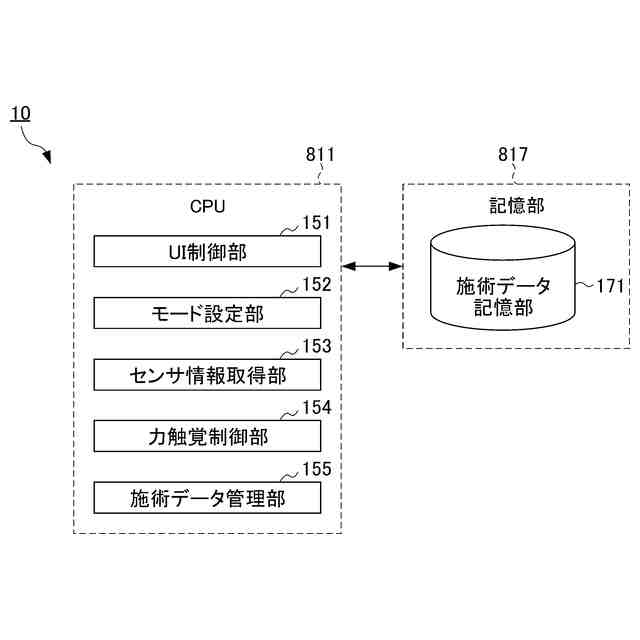
マスタ装置10の機能的構成を示すブロック図である。
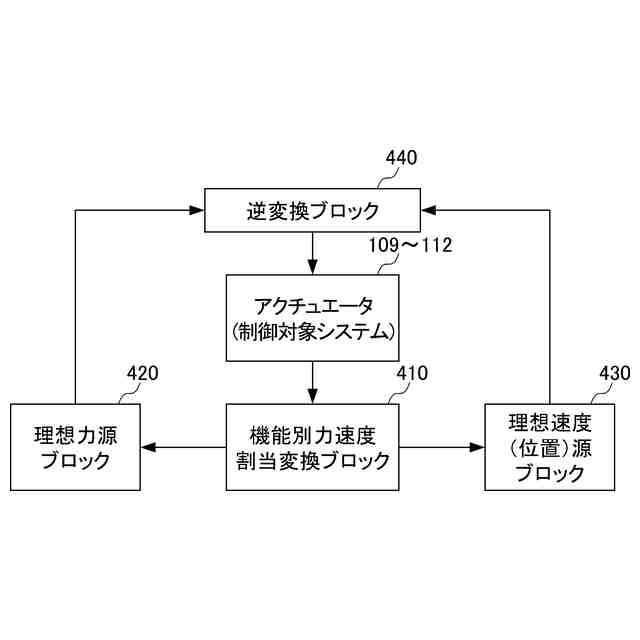
本実施形態において用いられる力触覚の伝達制御を実現するためのアルゴリズムを示すブロック図である。
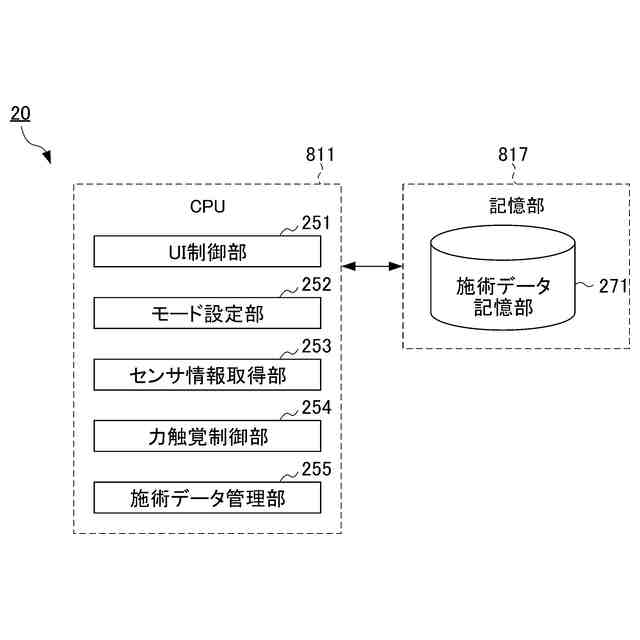
スレーブ装置20の機能的構成を示すブロック図である。
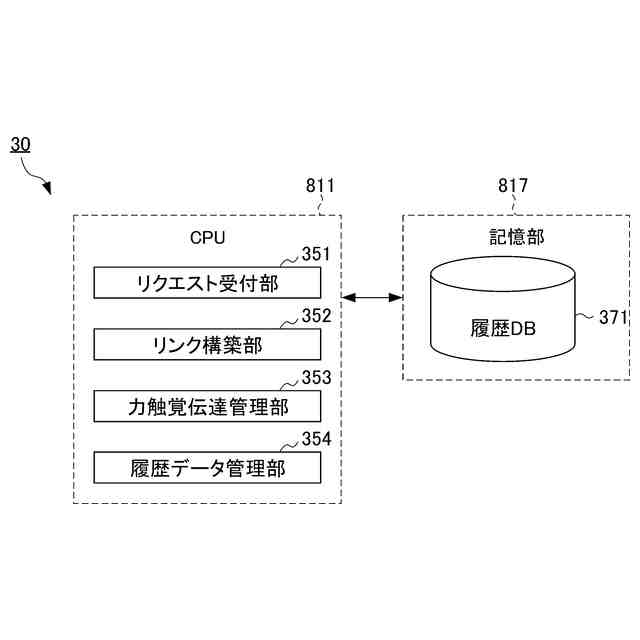
制御装置30の機能的構成を示すブロック図である。
位置・力制御システム1における個別施術モードの概念を示す模式図である。
位置・力制御システム1における複数施術モードの概念を示す模式図である。
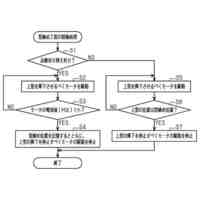
位置・力制御システム1が実行する遠隔施術処理の流れを示すフローチャートである。
個別施術処理の流れを示すフローチャートである。
複数施術処理の流れを示すフローチャートである。
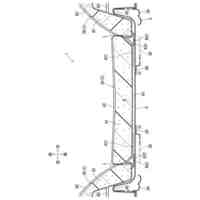
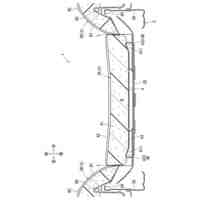
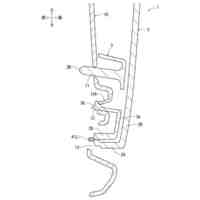
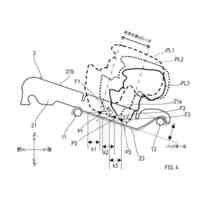
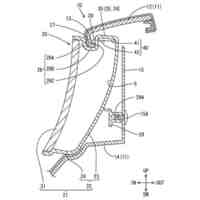
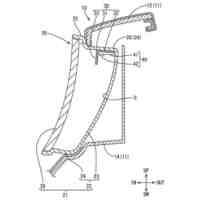
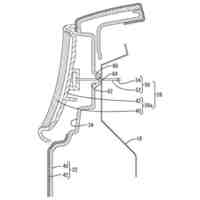
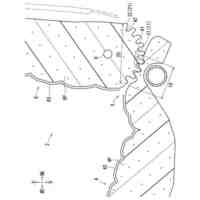
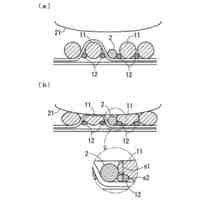
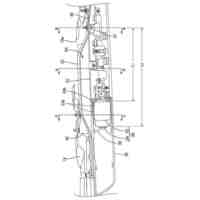
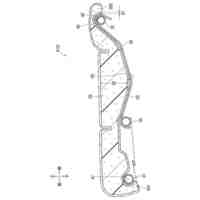
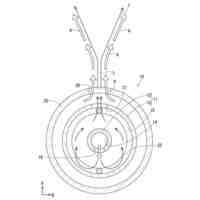
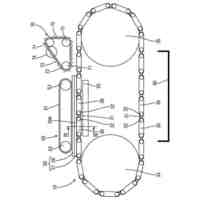
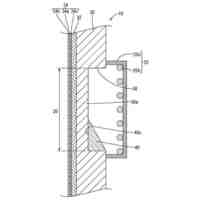
ユーザの背中を摩る機能を備えたスレーブ装置20の構成を示す模式図である。
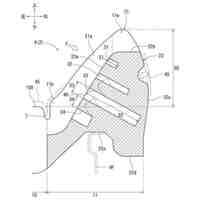
図14に示すスレーブ装置20の正面図である。
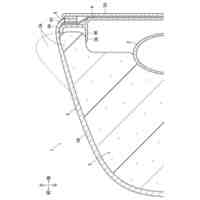
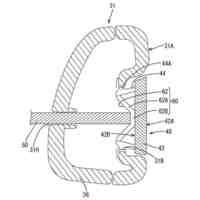
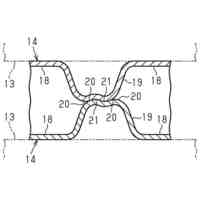
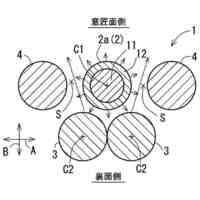
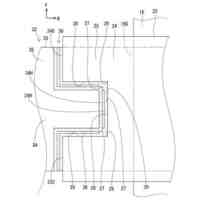
図15におけるスレーブ装置20のA-A’断面図である。
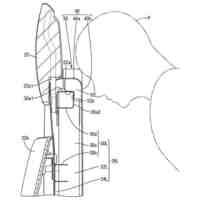
図15におけるスレーブ装置20のB-B’断面図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を用いて説明する。
[構成]
図1は、本発明の一実施形態に係る位置・力制御システム1のシステム構成を示す模式図である。
本実施形態に係る位置・力制御システム1は、施術者によって使用される複数のマスタ装置10と、ユーザによって使用される複数のスレーブ装置20とが遠隔的に設置されると共に、任意のマスタ装置10とスレーブ装置20とを組み合わせて通信リンクを確立することが可能となっている。マスタ装置10は、施術者が行う施術動作を受け付ける装置形態となっており、スレーブ装置20は、施術者が行った施術動作をユーザ(被施術者)に作用させることが可能な装置形態となっている。そして、マスタ装置10とスレーブ装置20とで、力触覚の伝達制御を実行することにより、施術者がマスタ装置10を介して行った施術動作が、スレーブ装置20を介してユーザに入力されると共に、ユーザからスレーブ装置20に入力した反力が、マスタ装置10を介して施術者に提示される。
したがって、施術者がユーザに対して直接施術する場合のマッサージにより近い触覚を、マッサージを行う機器によって提示することが可能となる。
【0010】
図1に示すように、本実施形態に係る位置・力制御システム1は、施術者が施術(マッサージ等)の動作を入力するマスタ装置10と、ユーザ(被施術者)に対して施術のための動作を出力するスレーブ装置20と、マスタ装置10とスレーブ装置20との間における力触覚の伝達を制御する制御装置30と、スレーブ装置20によって施術を受けるユーザを撮影する撮像装置Cと、撮像装置Cによって撮影されたユーザの画像を表示する表示装置Dと、を備えている。また、マスタ装置10、スレーブ装置20、制御装置30、撮像装置C及び表示装置Dは、インターネット等のネットワーク40を介して、互いに通信可能に構成されている。なお、本実施形態において、位置・力制御システム1には、マスタ装置10、スレーブ装置20、撮像装置C及び表示装置Dがそれぞれ複数含まれるものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ紡織株式会社
シート
18日前
トヨタ紡織株式会社
シート
18日前
トヨタ紡織株式会社
シート
18日前
トヨタ紡織株式会社
シート
18日前
トヨタ紡織株式会社
表皮材
4日前
トヨタ紡織株式会社
ポケット
1か月前
トヨタ紡織株式会社
プレス金型
1か月前
トヨタ紡織株式会社
天井送風装置
19日前
トヨタ紡織株式会社
乗物用シート
24日前
トヨタ紡織株式会社
乗物用シート
1か月前
トヨタ紡織株式会社
シートバック
3日前
トヨタ紡織株式会社
乗物用シート
3日前
トヨタ紡織株式会社
乗物用照明装置
24日前
トヨタ紡織株式会社
乗物用照明装置
24日前
トヨタ紡織株式会社
乗物用内装部材
3日前
トヨタ紡織株式会社
乗物衝撃吸収構造
3日前
トヨタ紡織株式会社
燃料電池スタック
27日前
トヨタ紡織株式会社
ロータの製造方法
1か月前
トヨタ紡織株式会社
クッションフレーム
1か月前
トヨタ紡織株式会社
モータコアの製造方法
24日前
トヨタ紡織株式会社
乗物用内装材の取付構造
24日前
トヨタ紡織株式会社
燃料電池のセルスタック
1か月前
トヨタ紡織株式会社
燃料電池のセルスタック
1か月前
トヨタ紡織株式会社
織物、表皮材及び内装部品
4日前
トヨタ紡織株式会社
乗物内装品の異音抑制構造
27日前
トヨタ紡織株式会社
織物、表皮材及び内装部品
4日前
トヨタ紡織株式会社
シートカバー孔周縁補強具
1か月前
トヨタ紡織株式会社
バニティミラーの取付構造
1か月前
トヨタ紡織株式会社
織物、表皮材及び内装部品
19日前
トヨタ紡織株式会社
乗物用サイドドアのドア構造
17日前
トヨタ紡織株式会社
乗物用シート及びその製造方法
1か月前
トヨタ紡織株式会社
ノズルヘッド及び電界紡糸装置
20日前
トヨタ紡織株式会社
剥離装置及び積層体の剥離方法
1か月前
トヨタ紡織株式会社
車両用シートの温調性能体感装置
24日前
トヨタ紡織株式会社
二次電池及び二次電池の製造方法
20日前
トヨタ紡織株式会社
光透過意匠材および照明付き装飾品
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ