TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025113394
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2025085347,2022187146
出願日
2025-05-22,2018-01-10
発明の名称
作業車両用の自動走行システム、及び作業車両用の自動走行方法
出願人
ヤンマーパワーテクノロジー株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/648 20240101AFI20250725BHJP(制御;調整)
要約
【課題】往復案内経路の生成を容易にしつつ周回案内経路を生成できるようにして自動走行による作業後に残る未耕地を少なくする。
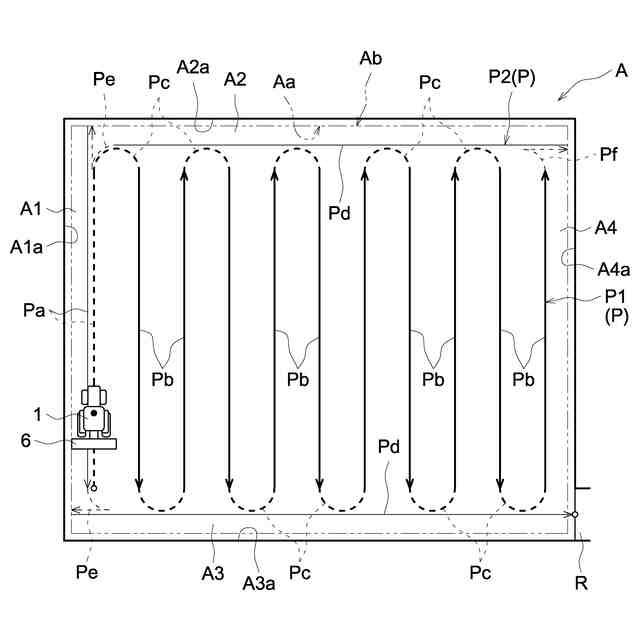
【解決手段】作業車両用の自動走行システムは、目標経路生成部を備える。目標経路生成部は、作業地Aにおいて作業車両1を蛇行状に往復案内するための往復案内経路P1と、作業車両1を作業地Aの外周側において周回案内するための周回案内経路P2と、を生成する。周回案内経路P2は、作業車両1が作業地Aからはみ出すこと、又は、作業車両1が作業地Aの外周の障害物に接触することを回避するために作業地Aの外周の内側に設定されるマージン領域Aaと、作業地Aの中央側の作業領域Abと、を区分する境界線の内側に生成される経路である。
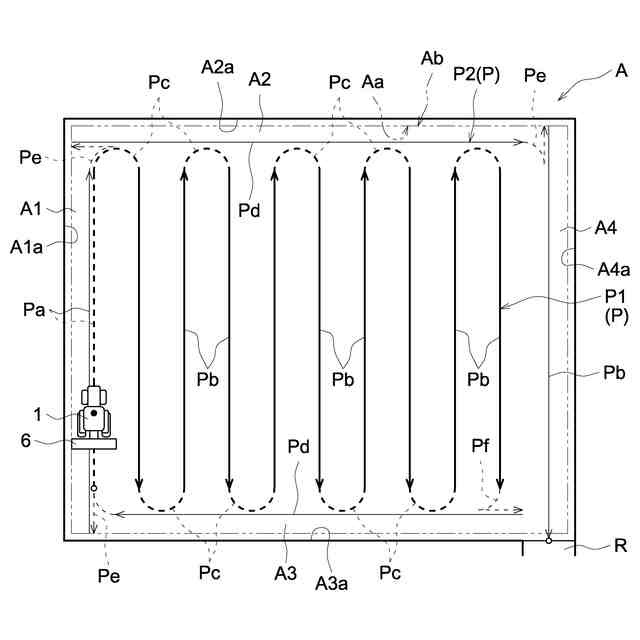
【選択図】図3
特許請求の範囲
【請求項1】
作業地において作業車両を蛇行状に往復案内するための往復案内経路と、前記作業車両を前記作業地の外周側において周回案内するための周回案内経路と、を生成する目標経路生成部を備え、
前記周回案内経路は、前記作業車両が前記作業地からはみ出すこと、又は、前記作業車両が前記作業地の外周の障害物に接触することを回避するために前記作業地の外周の内側に設定されるマージン領域と、前記作業地の中央側の作業領域と、を区分する境界線の内側に生成される経路である、
作業車両用の自動走行システム。
続きを表示(約 580 文字)
【請求項2】
前記周回案内経路の最終経路は、前記作業地における前記作業車両の出口から前記作業車両が前記作業地外に退出する際の退出方向と同一方向に延びる経路である、
請求項1に記載の作業車両用の自動走行システム。
【請求項3】
前記周回案内経路は、前記周回案内経路の始端部に接続され、前記作業地における前記作業車両の出口から離れる向きに前記作業車両を案内する経路を含む、
請求項1または2に記載の作業車両用の自動走行システム。
【請求項4】
前記マージン領域は、前記作業車両に関する情報に基づいて設定される、
請求項1~3のいずれか1項に記載の作業車両用の自動走行システム。
【請求項5】
作業地において作業車両を蛇行状に往復案内するための往復案内経路と、前記作業車両を前記作業地の外周側において周回案内するための周回案内経路と、を生成する作業車両用の自動走行方法であって、
前記周回案内経路は、前記作業車両が前記作業地からはみ出すこと、又は、前記作業車両が前記作業地の外周の障害物に接触することを回避するために前記作業地の外周の内側に設定されるマージン領域と、前記作業地の中央側の作業領域と、を区分する境界線の内側に生成される経路である、
作業車両用の自動走行方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を蛇行状に往復案内する往復案内経路と、作業車両を作業地の外周側において周回案内する周回案内経路と、を生成する目標経路生成部を備えた作業車両用の自動走行システム、及び作業車両用の自動走行方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
上記のような作業車両用の自動走行システムとしては、圃場の形状から中央作業地とその周囲に位置する枕地とを区分けする区分けデータを生成し、直線状の往復経路とUターン経路とを有する中央作業地走行経路(往復案内経路)を子作業車用の目標走行経路として算定し、子作業車が親作業車に先行して目標走行経路に基づいて自動走行した後、親作業車が手動運転で子作業車に先行して枕地を周回走行するのに伴って、親作業車の走行軌跡に基づいて枕地での子作業車用の目標走行経路となる枕地走行経路(周回案内経路)を算定する経路算定モジュールを備えたものがある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-31649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の作業車両用の自動走行システムにおいては、中央作業地が、往復案内経路に基づく作業車の自動走行によって作業される自動作業領域となり、枕地が、親作業車の手動運転に基づく子作業車の自動走行によって作業される半自動作業領域となるように、圃場内の作業領域を区分けすることが行われている。これにより、例えば、往復案内経路に基づく自動走行による作業によって、中央作業地の旋回側に不揃いの残耕が残るようになったとしても、枕地での半自動運転による作業車の周回走行により、中央作業地の旋回側に残る不揃いの残耕を枕地の未耕地とともに耕耘することができる。その反面、往復案内経路などを生成する上においては、その前の段階にて前述した区分けデータを生成する必要がある。この区分けデータは、これに基づいて圃場内の作業領域を区分けすることで得られる中央作業地とその周囲に位置する枕地とのそれぞれが、作業車の作業幅などを考慮して算定された例えば作業幅の整数倍の幅寸法を有する領域となるように、圃場内の作業領域を区分けするためのものであることから、その生成に複雑な演算処理を要することになる。つまり、往復案内経路などを生成する上においては、複雑な演算処理を要する区分けデータを生成する必要があることから、往復案内経路などの生成を容易にする上において改善の余地がある。また、枕地での周回走行はユーザによる親作業車の手動運転に基づくことから、ユーザの負担を軽減する上においても改善の余地がある。
【0005】
ところで、往復案内経路を生成する上においては、基準経路となる往復案内経路における1番目の往路を圃場の端辺に近接させて生成するほど、往復案内経路の生成が容易になり、また、往復案内経路が長くなることにより、往復案内経路に基づく自動走行による作業後に残る未耕地を少なくすることができる。その反面、基準経路と圃場の端辺との間に周回用の経路を生成するための領域を確保することが難しくなり、この領域を確保することができない場合は、中央作業地の旋回側に残る不揃いの残耕を周回走行で耕耘することができなくなる。
【0006】
上記の実情に鑑み、本発明の主たる課題は、往復案内経路および周回案内経路の生成を容易にしながら自動走行による作業後に残る作業地での未作業領域を少なくする点にある。
【課題を解決するための手段】
【0007】
本発明の一態様に係る作業車両用の自動走行システムは、目標経路生成部を備える。前記目標経路生成部は、作業地において作業車両を蛇行状に往復案内するための往復案内経路と、前記作業車両を前記作業地の外周側において周回案内するための周回案内経路と、を生成する。前記周回案内経路は、前記作業車両が前記作業地からはみ出すこと、又は、前記作業車両が前記作業地の外周の障害物に接触することを回避するために前記作業地の外周の内側に設定されるマージン領域と、前記作業地の中央側の作業領域と、を区分する境界線の内側に生成される経路である。
【0008】
本発明の一態様に係る作業車両用の自動走行方法は、作業地において作業車両を蛇行状に往復案内するための往復案内経路と、前記作業車両を前記作業地の外周側において周回案内するための周回案内経路と、を生成する。前記作業車両用の自動走行方法では、前記周回案内経路は、前記作業車両が前記作業地からはみ出すこと、又は、前記作業車両が前記作業地の外周の障害物に接触することを回避するために前記作業地の外周の内側に設定されるマージン領域と、前記作業地の中央側の作業領域と、を区分する境界線の内側に生成される経路である。
【図面の簡単な説明】
【0009】
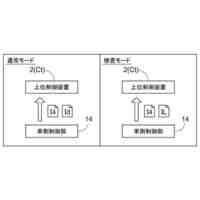
作業車両用の自動走行システムの概略構成を示す図
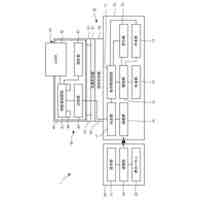
作業車両用の自動走行システムの概略構成を示すブロック図
目標経路生成部により生成される目標経路のうちの第1例示経路を示す図
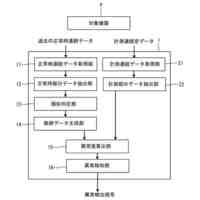
目標経路生成制御のフローチャート
目標経路生成部により生成される目標経路のうちの第2例示経路を示す図
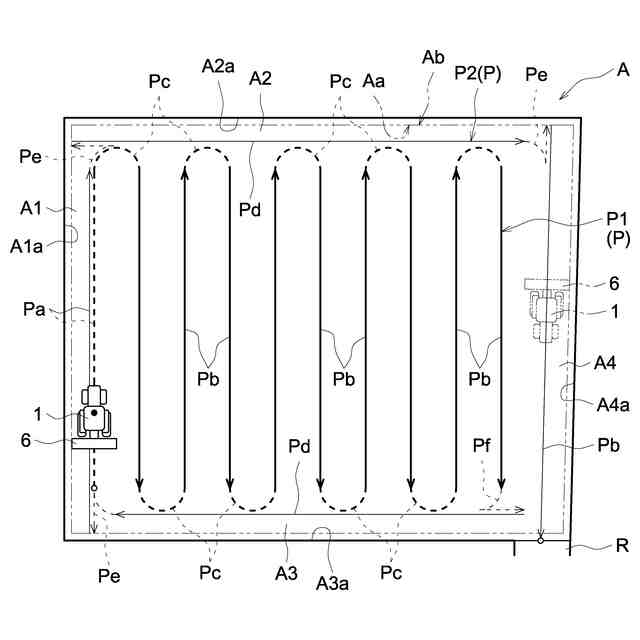
目標経路生成部により生成される目標経路のうちの第3例示経路を示す図
【発明を実施するための形態】
【0010】
本発明に係る作業車両用の自動走行システムを、作業車両の一例であるトラクタに適用した実施形態を図面に基づいて説明する。
なお、本発明に係る作業車両用の自動走行システムは、トラクタ以外の、乗用草刈機などの乗用作業車両、および、無人草刈機などの無人作業車両に適用することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
16日前
株式会社クボタ
作業車
3か月前
ローム株式会社
半導体集積回路
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
5日前
株式会社ダイフク
搬送車
3か月前
トヨタ自動車株式会社
生産管理システム
2日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
3か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社鷺宮製作所
制御装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
25日前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社やまびこ
走行制御装置
3か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
9日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社テイエルブイ
減圧弁の制御装置
11日前
アズビル株式会社
制御システムおよび制御方法
5日前
株式会社タブチ
減圧弁
3か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
アズビル株式会社
制御システムおよび制御方法
5日前
三菱電機株式会社
電源回路
25日前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ