TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108234
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2024002031
出願日
2024-01-10
発明の名称
減圧弁の制御装置
出願人
株式会社テイエルブイ
代理人
個人
,
個人
主分類
G05D
16/20 20060101AFI20250715BHJP(制御;調整)
要約
【課題】正確な到達時間を予測することができる。
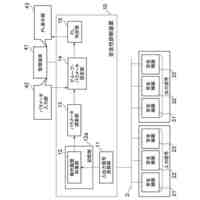
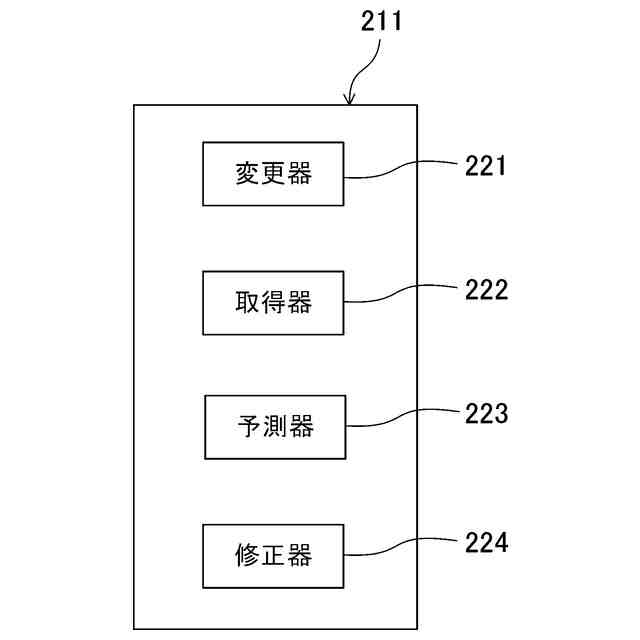
【解決手段】減圧弁の制御装置200は、電動アクチュエータ120を操作して設定圧力を目標圧力に変更する圧力変更を実行する変更器221と、減圧弁100の実圧力が目標圧力に到達するまでの到達時間を予測する予測器223と、圧力変更時に電動アクチュエータ120の操作に対する実圧力の変化の制御応答性に関連する応答性パラメータを取得する取得器222とを備え、予測器223は、過去の複数回の圧力変更において取得器222により取得された複数の応答性パラメータに応答性パラメータの高さに応じて重み付けを行って、重み付けされた複数の応答性パラメータに基づいて、目標圧力と減圧弁100の実圧力との偏差から到達時間を予測する。
【選択図】図4
特許請求の範囲
【請求項1】
二次側の設定圧力を電動アクチュエータによって調節可能な減圧弁の制御装置であって、
前記電動アクチュエータを操作して前記設定圧力を目標圧力に変更する圧力変更を実行する変更器と、
前記減圧弁の二次側の実圧力が前記目標圧力に到達するまでの到達時間を予測する予測器と、
前記圧力変更時に前記電動アクチュエータの操作に対する前記実圧力の変化の制御応答性に関連する応答性パラメータを取得する取得器とを備え、
前記予測器は、過去の複数回の前記圧力変更において前記取得器により取得された複数の前記応答性パラメータに前記応答性パラメータの高さに応じて重み付けを行って、重み付けされた複数の前記応答性パラメータに基づいて、前記目標圧力と前記減圧弁の二次側の実圧力との偏差から前記到達時間を予測する減圧弁の制御装置。
続きを表示(約 980 文字)
【請求項2】
請求項1に記載の減圧弁の制御装置において、
前記予測器は、複数の前記応答性パラメータのうち基準よりも低い前記応答性パラメータを、前記到達時間の予測に用いる前記複数の前記応答性パラメータから除外する減圧弁の制御装置。
【請求項3】
請求項1に記載の減圧弁の制御装置において、
前記応答性パラメータは、前記実圧力の変化率を含み、
前記予測器は、複数の前記応答性パラメータにおける複数の前記実圧力の変化率に前記実圧力の変化率の絶対値の大きさに応じて重み付けを行って、重み付けされた複数の前記実圧力の変化率に基づいて前記到達時間を予測する減圧弁の制御装置。
【請求項4】
請求項3に記載の減圧弁の制御装置において、
前記応答性パラメータは、前記電動アクチュエータの操作に対する前記実圧力の変化のむだ時間をさらに含み、
前記予測器は、複数の前記応答性パラメータにおける複数の前記実圧力の変化率に前記実圧力の変化率の絶対値の大きさに応じて重み付けを行って、前記むだ時間及び重み付けされた複数の前記実圧力の変化率に基づいて前記到達時間を予測する減圧弁の制御装置。
【請求項5】
請求項4に記載の減圧弁の制御装置において、
前記予測器は、複数の前記応答性パラメータにおける複数の前記むだ時間のうち、直近の前記圧力変更における前記むだ時間だけを前記到達時間の予測に用いる減圧弁の制御装置。
【請求項6】
請求項4又は5に記載の減圧弁の制御装置において、
前記予測器は、以下の式(1)に基づいて前記到達時間を予測する減圧弁の制御装置。
T=Δ×B+A・・・(1)
ここで、Tは前記到達時間であり、Δは前記偏差であり、Aは前記むだ時間の代表値であり、Bは重み付けされた複数の前記実圧力の変化率に基づいて算出された前記実圧力の変化率の代表値である。
【請求項7】
請求項1に記載の減圧弁の制御装置において、
前記到達時間に達したときの前記目標圧力と前記実圧力との偏差が閾値よりも大きい場合、前記実圧力が前記目標圧力に近づくように前記電動アクチュエータを調節する修正器をさらに備える減圧弁の制御装置。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、減圧弁の制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来より、減圧弁の二次側の設定圧力を制御する制御装置が知られている。例えば、特許文献1には、減圧弁の設定圧力を調節する圧力調節ネジに電動アクチュエータが連結され、電動アクチュエータを操作する制御装置が開示されている。具体的には、制御装置は、電動アクチュエータを操作して圧力調節ネジのねじ込み量を調節し、減圧弁の設定圧力を制御する。
【先行技術文献】
【特許文献】
【0003】
特開平1-316504号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、減圧弁の設定圧力を目標圧力に変更する場合、減圧弁の二次側の実圧力が目標圧力に到達したか否かを判断する方法として、減圧弁の二次側の実圧力を直接に確認する方法があるが、それ以外に、減圧弁の二次側の実圧力が目標圧力に到達するまでの到達時間を予測する方法がある。具体的には、予測された到達時間に達したときに、減圧弁の二次側の実圧力が目標圧力に到達したと判断する。かかる場合、正確な到達時間を予測することが望まれている。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、正確な到達時間を予測することにある。
【課題を解決するための手段】
【0006】
ここに開示された減圧弁の制御装置は、二次側の設定圧力を電動アクチュエータによって調節可能な減圧弁の制御装置であって、前記電動アクチュエータを操作して前記設定圧力を目標圧力に変更する圧力変更を実行する変更器と、前記減圧弁の二次側の実圧力が前記目標圧力に到達するまでの到達時間を予測する予測器と、前記圧力変更時に前記電動アクチュエータの操作に対する前記実圧力の変化の制御応答性に関連する応答性パラメータを取得する取得器とを備え、前記予測器は、過去の複数回の前記圧力変更において前記取得器により取得された複数の前記応答性パラメータに前記応答性パラメータの高さに応じて重み付けを行って、重み付けされた複数の前記応答性パラメータに基づいて、前記目標圧力と前記減圧弁の二次側の実圧力との偏差から前記到達時間を予測する。
【発明の効果】
【0007】
前記減圧弁の制御装置によれば、正確な到達時間を予測できる。
【図面の簡単な説明】
【0008】
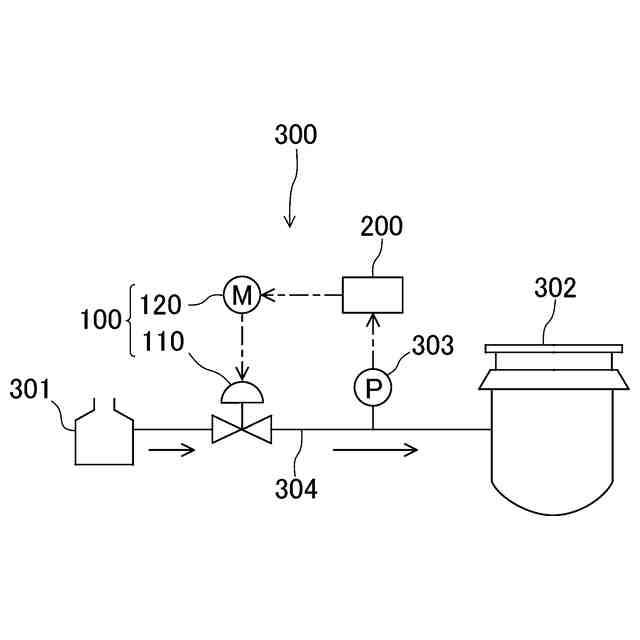
図1は、実施形態に係る減圧弁の制御装置を含む流体システムを示す概略図である。
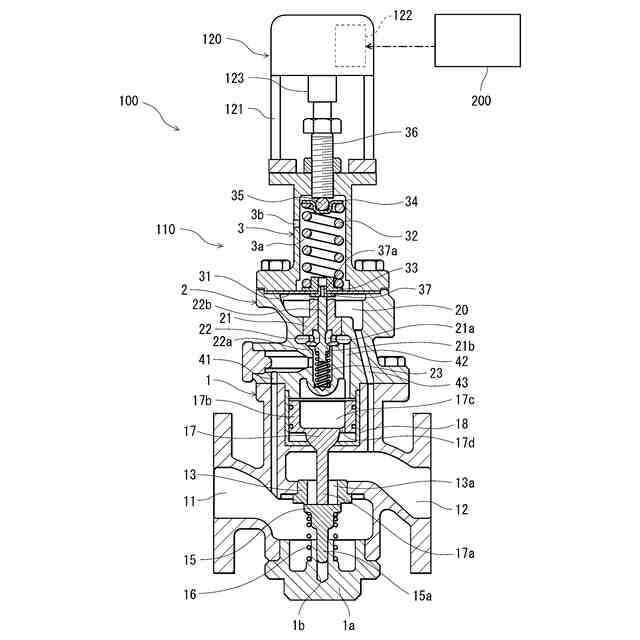
図2は、減圧弁の概略断面図である。
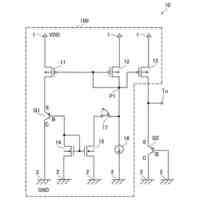
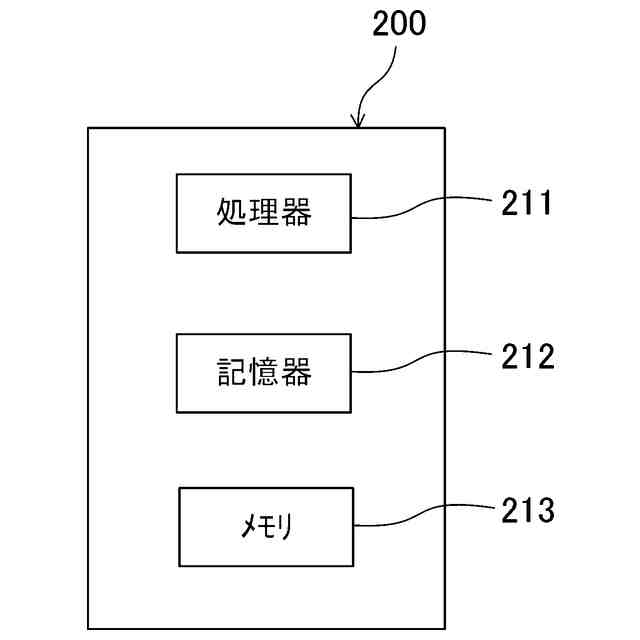
図3は、減圧弁の制御装置の概略的なハードウェア構成を示す図である。
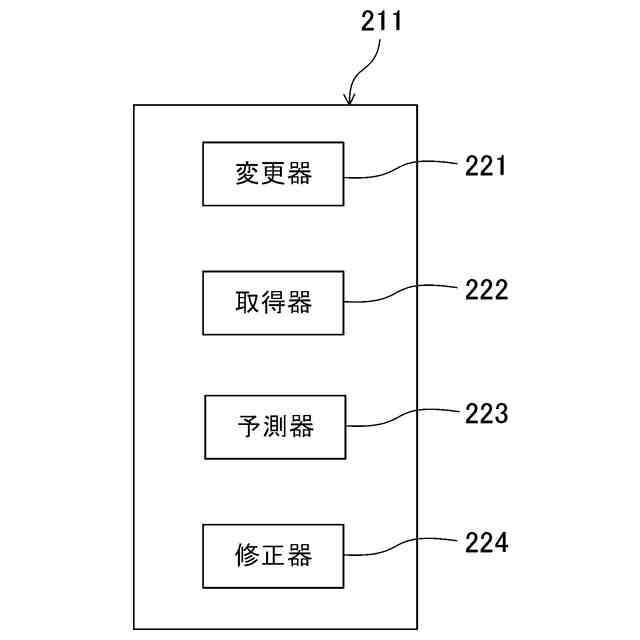
図4は、処理器の制御系統の構成を示すブロック図である。
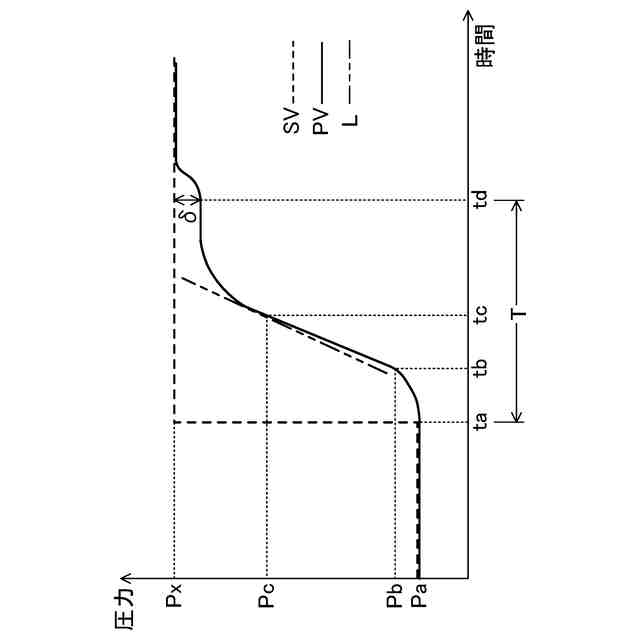
図5は、減圧弁の設定圧力を目標圧力に変更する場合において、時間と減圧弁の実圧力との関係を示すグラフである。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、実施形態に係る減圧弁の制御装置200を含む流体システム300を示す概略図である。以下、減圧弁の制御装置200を単に制御装置200と称する。
【0010】
流体システム300は、流体を利用したシステムである。流体は、この例では蒸気である。流体システム300は、制御装置200に加え、圧力源301と負荷装置302と減圧弁100と圧力センサ303とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社FUJI
加工機械ライン
3か月前
ローム株式会社
基準電圧源
1か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
21日前
新電元工業株式会社
作業用ロボット
19日前
個人
作業車両自動化システム
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
26日前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
減圧弁
2か月前
株式会社ダイフク
物品搬送設備
今日
エイブリック株式会社
電流補償回路及び半導体装置
15日前
トヨタ自動車株式会社
クラッチペダル
2か月前
カヤバ株式会社
減圧弁
28日前
キヤノン株式会社
配送システム
1か月前
トヨタ自動車株式会社
制御装置
1か月前
マーク ヘイリー
消防ロボット
3か月前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
株式会社TMEIC
安全性診断装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
日野自動車株式会社
自動運転装置
20日前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ