TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109643
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024014007
出願日
2024-02-01
発明の名称
消防ロボット
出願人
マーク ヘイリー
代理人
個人
,
個人
,
個人
主分類
G05D
1/689 20240101AFI20250717BHJP(制御;調整)
要約
【課題】火災、ワイルドファイア、森林火災、ビルおよび/または家屋火災、一般火災などを、水および/または消火剤を正確に炎に向けることによって消火しうる消防ロボットのための装置、システムおよび方法に関する。
【解決手段】消防ロボットは、ホースのノズルを正確に火災に向けるために、センサを用いて火災の方向、範囲および温度をピンポイントで検出する。これは、へき地のワイルドファイアに飛び込むスカイダイビングロボットであるか、ドローン、ヘリコプター、または、消防車の場合には、少なくとも2自由度を有するロボットアームまたはロボットノズルでもありうるもので、センサ、並びに、火災位置、範囲および温度をロボットに伝達しうるネットワークを用いて、水および/または消火剤を確実に最適に使用しうる。
【選択図】図9
特許請求の範囲
【請求項1】
スカイダイビングロボットのためのシステムにおいて、
前記スカイダイビングロボットは、既製または特注のパラシュートを用いて、対地高度(AGL)30,000フィート(約9.1km)まで、または、それより高い地点でジャンプし始めて、人間のようにスカイダイビングし、該パラシュートのトグルを握り、該パラシュートを開いて、次に該パラシュートを制御し、更に次に自分のアームを人間のように上下に動作して回転、操縦、更に、目標地点の近くに着地するロボットであり、
前記システムは、
前記ロボットが、前記パラシュートの前記トグルを握って、該パラシュートを開き、該パラシュートを操縦操作して、更に任意で、軍事任務のために武器を操作する人間型ハンドと、
スカイダイビングを追跡し、前記目標地点に対する前記スカイダイビングロボットの位置を示して、実際のスカイダイバーが、パラシュートの移動をジャンパーが腕を上下に動作することで制御し、該パラシュートを回転、制御、および、速度設定するのと同様に、該ロボットが、アームとハンドの動作を用いて前記パラシュートの制御トグルを制御して、操縦し、該目標地点の近くに着地するのを可能にする全地球測位システム(GPS)、および想定風速を含む他のセンサと、
前記ロボットが、前記パラシュートを開く前記トグル、および該パラシュートの制御トグルを見つけて引き、その時、前記人間型ハンドを導いて該トグルを握り、該ロボットの前記アームの動きを用いて、単に該トグルを上下に引いて、該パラシュートを操縦、回転し、該パラシュートの速度、フレア、および着地を制御し、更に、緊急時に切り離しを見つけて予備のパラシュートを引くのを可能にするコンピュータビジョンカメラシステムとを含み、
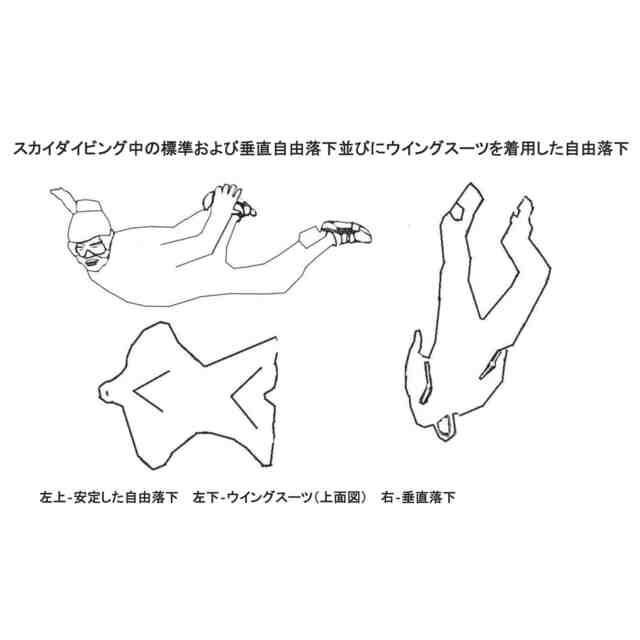
前記スカイダイビングロボットが、自由落下中に、トラッキングと称されるスカイダイバーが姿勢を変化させて回転または水平移動する技術を用いうるもので、トラッキングは、シミュレータ、および/または、実際のジャンプを用いて正確に着地する練習しうるものであり、該スカイダイビングロボットが、人間のように空力的に安定した姿勢の場合には、水平方向の移動がないが、該スカイダイビングロボットが、誘導ミサイルのように、腕を体部の横に置いて両方の脚部を合わせて真っすぐにすると、水平方向に毎時180マイル(毎時約290km)までか、それ以上で、垂直方向に毎時300マイル(毎時約482km)までか、それ以上で移動しうる、
システム。
続きを表示(約 2,500 文字)
【請求項2】
軍隊あるいは文民用パラシュートを用いてスカイダイビングし、軍または民間のペイロードを運搬し、スカイダイビングで発生しうる多数の緊急事態を処理する能力であって、該緊急事態は、パラシュートの切り離しが必要になり予備パラシュートを開かなくてはならないパラシュートの故障を含むものである前記ロボットの能力を更に含み、
前記能力は、トグルを握り、主要なパラシュートを切り離し、予備パラシュートを開き、カメラを用いて追跡し他のスカイダイバーとの衝突を避け、また、スカイダイバーのチームのシミュレーションの後にプログラムされ、カメラを使って着地領域をはっきり調べて第1の場所が到達不可か安全でないと考えらえる場合に、代替の着地地点を選択する能力である、請求項1に記載のシステム。
【請求項3】
地上と、他のスカイダイバーと、若しくは空中または地上の両方の人員のリアルタイムの(シミュレーションのまたは実在の)3Dマップのために継続的に更新されたデータを提供する飛行中の飛行機とのリアルタイム通信のための低コストで低帯域幅の長距離デジタル無線、またはネットワークを更に含み、
前記長距離デジタル無線、または前記ネットワークは、人員の携帯電話通信が故障した場合に任務で重要であり、前記システムは、チームをリアルタイムで追跡して、任務の成功を確実にし、前記データは、より広い安全な携帯電話ネットワークまたは他のネットワークに統合されうるものであり、
更に、GPSが使えない環境でも、カメラおよび地図を含む視覚支援ナビゲーション、星をトラッキングする天体ナビゲーション、若しくは、微小電気機械システム(MEMS)および慣性計測ユニット(IMU)など代わりの方法を用いてロボットを導くオプションを有する請求項1に記載のシステム。
【請求項4】
前記データは、表示部を用いたヘッドセットを用いるか、またはヘッドセットを用いない仮想現実スカイダイビングシミュレータを生成し、該データはトラッカーデータベース、および熟練したスカイダイバーからのフィードバックによって継続的に改善されて、前記ロボットの動きおよび正確さを、任務後に追跡し検討して、前記スカイダイビングロボットの能力を継続的に改善しうるものである、請求項1に記載のシステム。
【請求項5】
PCのみで持ち運び可能な仮想3D世界に没入するための仮想現実ヘッドセットを更に含み、
幾つかのスタンドアロンヘッドセットはPCを必要とせず、
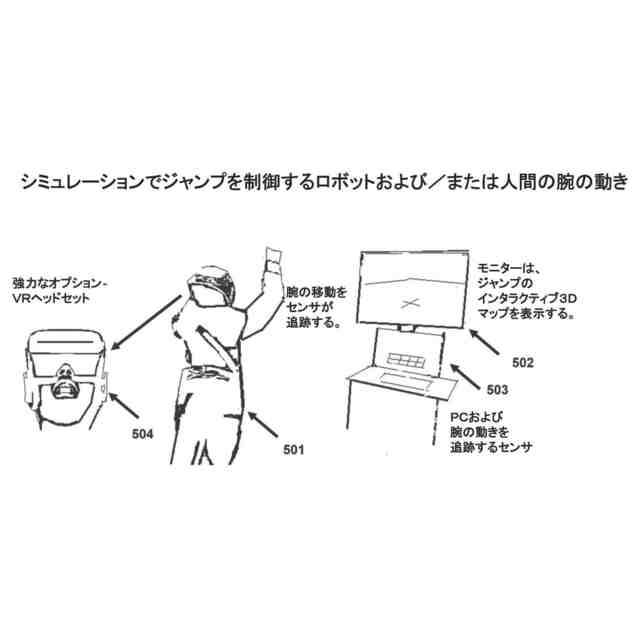
前記仮想3D世界は、テレビやプロジェクタのように仮想3D世界を画面に映し出されて、それを見た人に、ジャンパーを見る/評価することを可能にし、前記ヘッドセットもしくは前記センサが(ジャンパーが自分の転回および速度を制御するための)前記腕の動きを追跡し、
ユーザは、単に頭部を回転させることで、世界中の任意の場所において、ラウンド型パラシュートおよびラム・エア型パラシュートをシミュレートした独特の訓練システムを探索し、更に、軍の部隊または他のスカイダイバーが任務へと飛行中の飛行機の機内で、安価でコンパクトに用いうるもので、30,000フィート(約9.1km)より高い高度でジャンプする高高度降下高高度開傘(HAHO)の配置技術、更に夜間のジャンプも用いうるものである、請求項1に記載のシステム。
【請求項6】
ローカルまたは遠隔でネットワークを介して共有された模擬飛行データを、更に含み、
夜間または日中のジャンプを見るオプションを有し、12人より多くのジャンパーに会い、ロボットと同時に訓練させ、それは、精鋭ユニットが接近した隊形を練習して、衝突を防いでチームとして活動するために主要な要件であり、既存の技術はこれに取り組んでこなかったが、本技術は、高い費用効果で、12人以上のジャンパーのチームが練習して、直ちに任務を開始し、スカイダイビングロボットと訓練するのを可能にするものである、請求項1に記載のシステム。
【請求項7】
制御システムを更に含み、
任務中に計画が変更された場合には、前記人間のスカイダイバーは、前記スカイダイビングロボットの動作をオーバーライドするものである、請求項1に記載のシステム。
【請求項8】
前記スカイダイビングロボットの視力および把持力の限界に基づいて、より簡略な配置の選択肢が推奨される場合には、該スカイダイビングロボットを既存のロボットの補給システムを用いて配置させる選択肢を、更に含み、
補給ロボットが着地したらすぐに、前記スカイダイビングロボットは、単に該補給ロボットから脱出して、任務を継続し、前記人間のスカイダイバーより前に偵察を行いうるものである、請求項1に記載のシステム。
【請求項9】
前記ロボットは、武器を見つけて、前記人間型ハンドで把持し、更に視力および/またはネットワーク性能を用いて、味方か敵かを判別することを可能にし、敵の場合には、把持している該ハンドは、敵を狙って、該武器を発砲する性能を有し、多数のバックアップチェック部を用いて、該武器を発砲するのは、該視力および/またはネットワーク性能、若しくは、それらの組合せが、味方か敵か、ロボットか人間かを判別した時のみとすることを確認するコンピュータビジョンカメラシステムと、
人間のように、歩き、音で知らせ、武器を発砲する間、最適な防御姿勢を維持するよう伏せるか、敵の武器に撃たれるのを避ける能力を更に含む、請求項1に記載のシステム。
【請求項10】
前記ロボットの前記アームの動作能力と組み合わされた前記視力を、更に含み、
空中で、設定範囲より近くなった他のスカイダイバーから離れるように操縦して、更に、着地の際に、木などの物体を避けるものである、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、火災、ワイルドファイア(Wildfire)、森林火災、ビルおよび/または家屋火災、一般火災などを、水および/または消火剤を正確に炎に向けることによって消火しうる消防ロボットの装置、システムおよび方法に関し、それは、ホースのノズルを正確に火災に向けるために、センサを用いて火災の方向、範囲および温度をピンポイントで検出する。これは、ドローン、ヘリコプターまたは消防車のロボットアームでもありうる。ロボットは、下記特許(特許7184566号、以下「スカイダイビング追跡装置特許」あるいは単に「特許」という)の技術のロジックを搭載した「スカイダイビングロボット」(米国商標)(以下、「スカイダイビングロボット」という)と同じでもありうるが、これらのスカイダイビングロボットは、水の供給が厳しい場合に水を運び、更に、熱感知および範囲検出センサが、ロボットまたはウオータータンクのいずれかに備えられ、火災情報をロボットに伝達しうるネットワークを有しうる。本発明は、既製の、または特注のパラシュートを用いてスカイダイビングし、地震、洪水、森林火災などの災害時に人道的な物資を空中投下するような、軍または民間のペイロードを届けるスカイダイビングロボットの装置、システムおよび方法にも関する。スカイダイビングロボットは、自由落下、開傘及び目標地点に向かっての操縦、ペイロードの運搬、更に、GPS(全地球測位システム)の案内を用いて、日中でも夜間の暗闇でも正確な着地を行うことができる。スカイダイビングロボットが、対地高度(AGL)30,000フィート(約9.1km)の飛行機から飛び出した場合、最終目標地点は、何マイルも離れていることがありうる。スカイダイビングロボットは、カメラなどのセンサアレイを有する理想的な偵察隊であり、ペイロードを運び、目標地点の数フィート以内に正確に着地することができる。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
本発明による装置、システムおよび方法は、スカイダイビングロボットがスカイダイビングして、ペイロードを運び、人間のスカイダイバーより前に偵察したり、あるいは特殊軍事作戦または他の軍隊若しくは非軍隊の任務に際し、同時に着地したりするのを可能にする。
【0003】
軍隊の自由落下(MFF)は、人員および補給物資を輸送機から投入するための理想的な方法を提供する。輸送機は、敵の地対空ミサイル(SAM)を避けるために、高度35,000フィート(約10.7km)以上で飛行する。次に、ジャンパーおよび補給物資は、飛び出して、HALO(高高度降下低高度開傘)またはHAHO(高高度降下高高度開傘)のいずれかを用いる。スカイダイビングロボットは、前もって偵察可能にするためにHALOを用いて、毎時120マイル(毎時約193km)を超える速度で自由落下し、高度30,000フィート(約9.1km)以上の飛行機から飛び出してから僅か3分で着地する。一方、HAHOを用いた開傘または、(酸素が限られることから)15,000フィート(約4.6km)での開傘などのいくつかの変形例は、特殊部隊が偵察ロボットから見て全てクリアになるのを待つ間、特殊部隊がより長く空中に確実に留まることができるようにする。着地点が明確な場合には、スカイダイバーは目標地点へと進みうる。そうでない場合には、元の目標地点から何マイルか離れた予備の地点に着地してもよい。
【0004】
HAHOを用いたジャンプは、スカイダイバーが落下点から40マイル(約64km)より長く滑空するのを可能にする。ロボットが、元の目標地点は不十分な地点だと検出した場合には、部隊は、予備の着地点まで何マイルも滑空を続けうる。
【0005】
本発明者(Mark Haley)は、日本の大学教授で、そこで国際大会で6位になったものを含む地上空中ロボットを開発した。本発明者は、スカイダイバーを訓練する「スカイダイビング追跡装置」についての上記「特許」の発明者でもある。その技術におけるロジックは、スカイダイビングロボットが正確に目標地点に着地するのに必要な重要なロジックの一部である。本発明者は、最初の研究の中で、スカイダイビングを「死との6分間のダンス」と称した。スカイダイビングロボットを実際の特殊部隊のジャンパーと組み合わせることは、より難しく危険であり、任務を安全で効率的に完了するには、ロボットと人間の複雑なダンスアンサンブルかのような複雑なチームワークが求められる。上記スカイダイビング追跡装置特許の技術は、本願発明の消防ロボットの背景技術となるものであるので、本願明細書の末尾に全文を引用する。
【0006】
補給システム
スカイダイビングロボットは、正確かつ迅速に着地し、物資を届けるのに理想的である。毎時150マイル(毎時約241km)以上のスピードで、強風の中でも操縦することができる。
【先行技術文献】
【特許文献】
【0007】
特許7184566号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来存在しなかった、火災、ワイルドファイア(Wildfire)、森林火災、ビルおよび/または家屋火災、一般火災などを、水および/または消火剤を正確に炎に向けることによって消火しうる消防ロボットの装置、システムおよび方法を提供する。消防ロボットは、ドローン、ヘリコプターまたは消防車のロボットアームでもありうる。さらに、スカイダイビングロボットと同じでもありうる。
【課題を解決するための手段】
【0009】
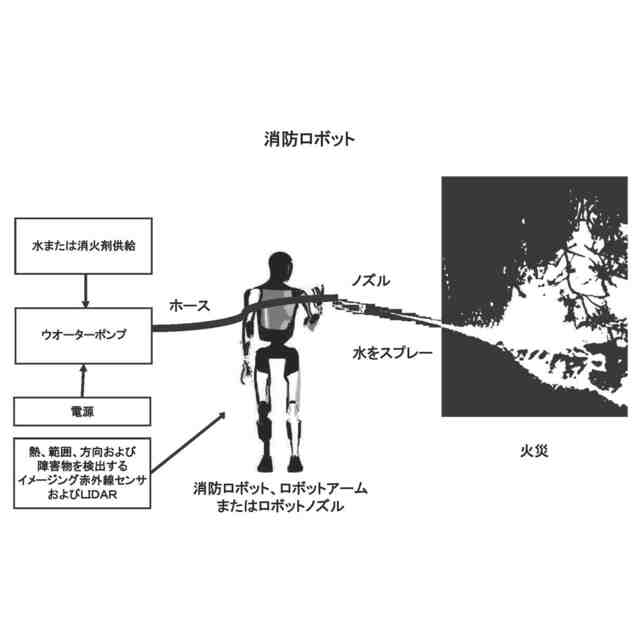
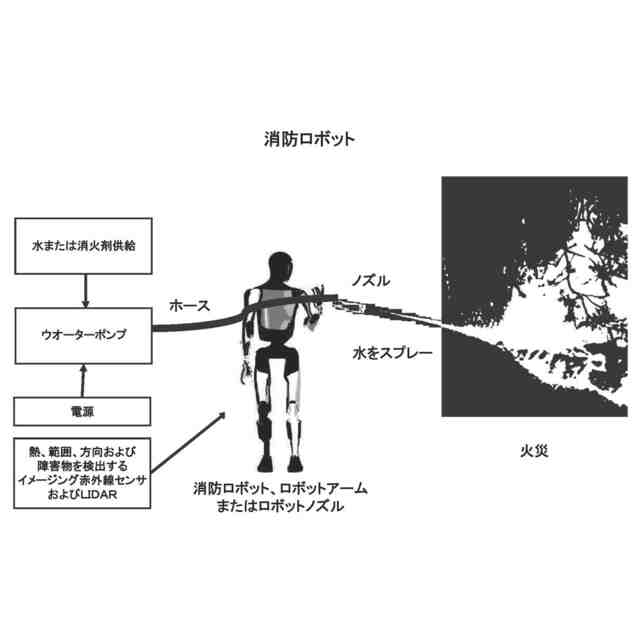
ウオーターポンプ、電源、および、水/消火剤源を有する消防ロボットが、LiDAR(Light Detection And Ranging)センサを用いて障害物を判別し、更に、ホース上の固定および/または移動自在ノズルを火災に正確に向けるために、イメージング赤外線センサを用いて火災の方向、範囲および温度を計算するかを示し、それらのセンサデータが重複することで、目標とする火災の情報が確認される。火災のGPS位置についての最初のデータは、衛星データからのもので、そのいくつかは、火災の始まりから1分以内の略リアルタイムデータを、30メートルか、より近い精度で提供し、次に、ドローンまたはロボットが自動で火災に接近する時に、火災の正確な最終的位置は、ドローンまたはロボット上のセンサによって提供されて、ドローンまたはロボットは、その場所に自動的に移動して消火する。これらを経時的に並べたイメージは、相対的な移動および範囲を示している。センサデータは、特に、火災の初期に延焼を確実に防ぐように、いつ放水するか、並びに、水のホースおよびノズルを向ける最適な方向を示すものであり、それによって、確実に最小量の水を用いて正確に消火する。固定ノズルの場合には、センサはドローン自体を正確に火災の上方に配置する。センサは、火災の情報がロボットにWi-Fiネットワークを介して伝達される別体のポンピングシステムの一部であるか、そうではなく、センサ、更にウオーターシステムさえ、ロボットの一部であり、ロボットは人間型ロボットでありうる。または、ロボットを、ドローン、ヘリコプター、または、消防車に載せる場合には、ホースおよびノズルを扱って向けるのに脚部は不要なので、重量を減らすために、少なくとも2自由度および多くの方向に向けて変形自在のスプレーノズルを有するロボットアームまたはロボットノズルのみでありうる。この正確に水を向ける目標決め情報は、人間の消防士にも伝達されて、より効果的に消火活動を確実に行うようにしうる。
【図面の簡単な説明】
【0010】
スカイダイビングロボット(概観)
スカイダイビングロボット-自由落下、開傘、パラシュート操縦、着地
地上偵察隊の例示
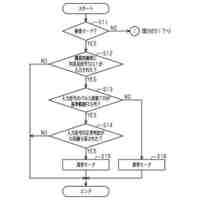
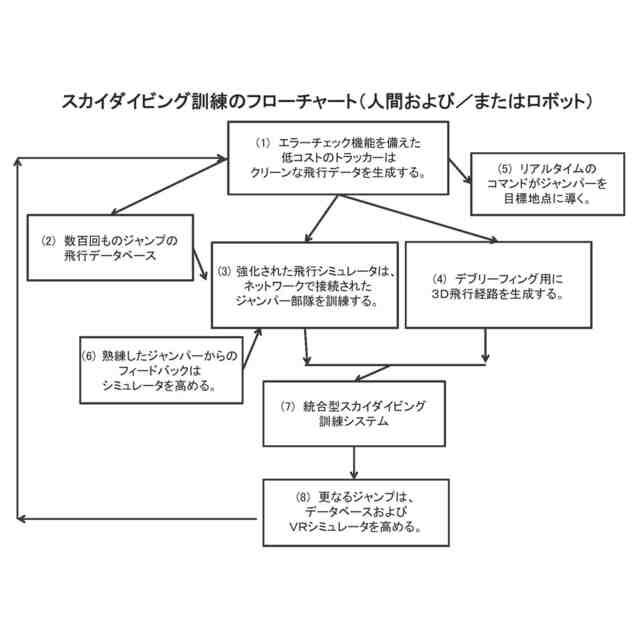
スカイダイビング訓練のフローチャート(人間および/またはロボット)
シミュレーションでジャンプを制御するロボットおよび/または人間の腕の動き
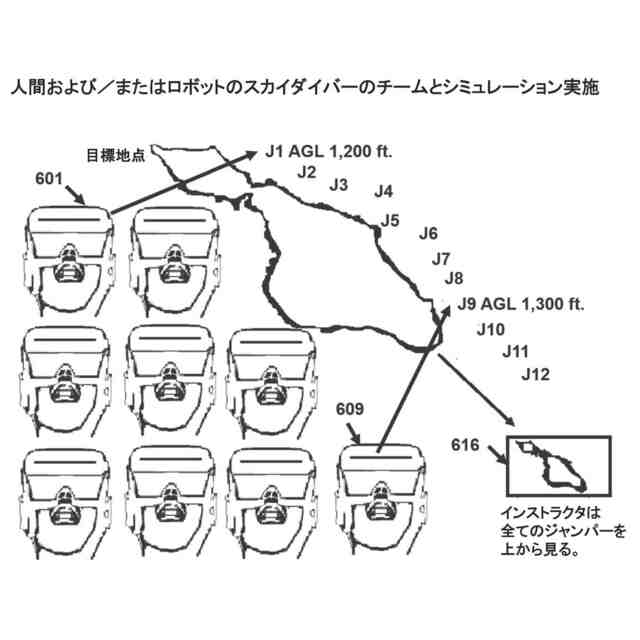
人間および/またはロボットのスカイダイバーのチームとシミュレーション実施
スカイダイビング中の標準および垂直自由落下、並びにウイングスーツを着用した自由落下の姿勢
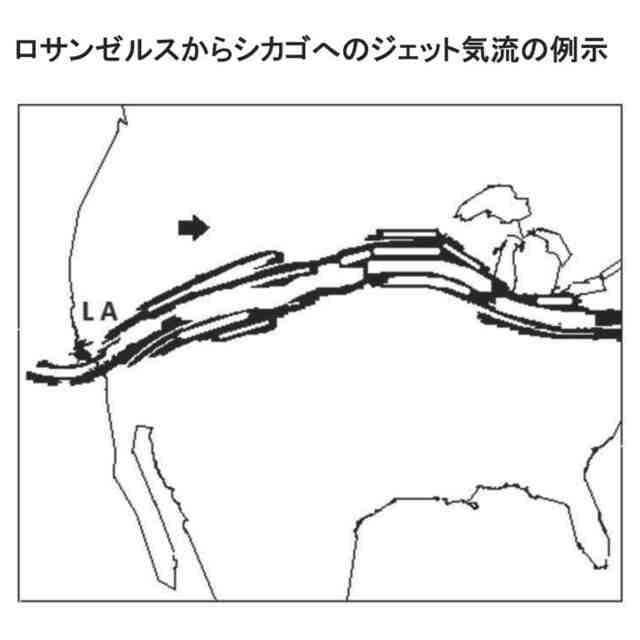
ロサンゼルスからシカゴへのジェット気流の例示
消防ロボットがセンサ情報に基づいて水を正確に向けている状態を示す図
ドローン(または、航空機)上の固定/変形自在ノズルおよび/またはロボットアーム、並びに、飛び降りるスカイダイビング/消防ロボットを航空機の下方から見た図‐衛星がGPS火災位置を提供
火災に配備されるバルーン/バッグを積んだ航空機を横から見た図
特許7184566号(以下「特許」)の特許請求の範囲の概要のフローチャート論理
特許の技術を用いたスモークジャンパーの訓練を示す
複数のスカイダイバーがチームとして働くことを可能にするネットワーク化されたバージョンを示す
VR中における13名のジャンパーの図を示す
特許のシステムがスカイダイバーを自動的に評価することを示す
離陸から着地までの飛行機の飛行経路をプロットするリアルタイムトラッカーを示す
トラッカーデータが、どのように動きのタイプ(即ち、飛行機、スカイダイブ等)とプロットを見るための最適な角度とを識別するかを示す
トラッカーデータが、どのように動きのタイプ(即ち、飛行機、スカイダイブ等)とプロットを見るための最適な角度とを識別するかを示す
トラッカーデータが、どのように動きのタイプ(即ち、飛行機、スカイダイブ等)とプロットを見るための最適な角度とを識別するかを示す
トラッカーデータが、どのように動きのタイプ(即ち、飛行機、スカイダイブ等)とプロットを見るための最適な角度とを識別するかを示す
トラッカーデータが、どのように動きのタイプ(即ち、飛行機、スカイダイブ等)とプロットを見るための最適な角度とを識別するかを示す
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
29日前
ローム株式会社
基準電圧源
1か月前
株式会社FUJI
加工機械ライン
3か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
20日前
新電元工業株式会社
作業用ロボット
18日前
個人
作業車両自動化システム
2か月前
豊田合成株式会社
機器制御装置
25日前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
制御装置
29日前
株式会社ダイフク
物品搬送設備
4か月前
エイブリック株式会社
電流補償回路及び半導体装置
14日前
株式会社ダイフク
物品搬送設備
4か月前
カヤバ株式会社
減圧弁
27日前
キヤノン株式会社
配送システム
1か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
3か月前
トヨタ自動車株式会社
クラッチペダル
2か月前
村田機械株式会社
搬送車システム
19日前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
日野自動車株式会社
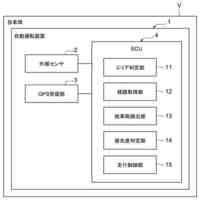
自動運転装置
19日前
株式会社CAOS
移動体の制御システム
1か月前
株式会社TMEIC
安全性診断装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ