TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116803
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024180590
出願日
2024-10-16
発明の名称
慣性航法
出願人
先進モビリティ株式会社
代理人
個人
主分類
B60W
50/00 20060101AFI20250801BHJP(車両一般)
要約
【課題】
現在位置から目標位置に至る経路を辿る精度が高い慣性航法を提供する。
【解決手段】
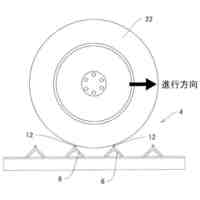
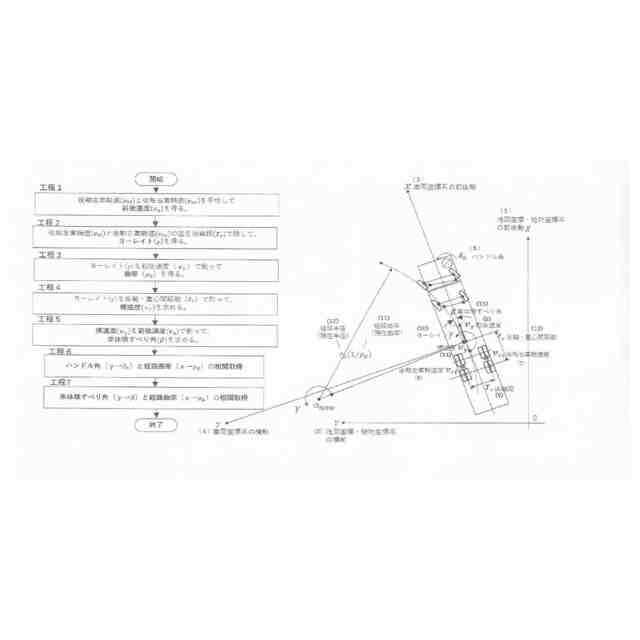
本発明は、車輪(タイヤ)が地面に描く軌跡を、その車輪の車輪速から描く(検出する)ことができ、その軌跡の曲率半径を算出することが出来る。その軌跡の曲率(経路の曲率)とその時のハンドル角との相関関係式を得て、それを制御式として経路を辿る制御システムである。その軌跡は、ハンドルのみに依らず、道路の横断勾配(カント)によっても変化するから、そのカントの影響も車輪軌跡の曲率に現れる。且つ、その軌跡は、乗客数、積載量変化に伴う車両総重量、重心位置などの車両状態量の変化によっても変化する。即ち、この発明は、ハンドルとカントおよび積載状態による「車両の進路変化を車輪速で捉えた制御式を備えて車両の進路制御をする」構成とした。
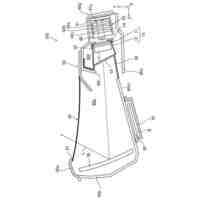
【選択図】 図1
特許請求の範囲
【請求項1】
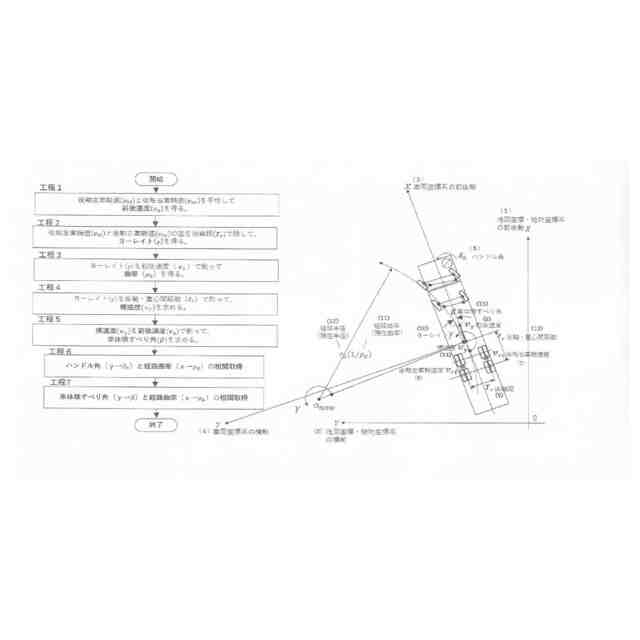
車輪(タイヤ)が路面に描く経路軌跡を、その後車輪の車輪速で捉えて車両重心点の経路曲率及び横すべり角を得てハンドル遊びに対応する「車輪速による経路曲率とハンドル角による切込み及び切り戻し制御式」に従って車両の進路制御をする慣性航法であって、
後軸左車輪速(v
rl
)と後軸右車輪速(v
rr
)を平均して前後速度(v
x
)を得て、次に、後軸左車輪速(v
rl
)と後軸右車輪速(v
rr
)の差を後輪距(T
r
)で除して、ヨーレイト(γ)を得て、そのヨーレイト(γ)を前後速度(v
x
)で割って経路曲率(ρ
G
)を求めて、
ハンドル角及び経路曲率(ρ
G
)を変数とする切込み及び切戻し制御式を備えて、
前記ヨーレイト(γ)を後軸・重心間距離(lr)で割って横速度(v
y
)を求め、この横速度(v
y
)を前後速度(v
x
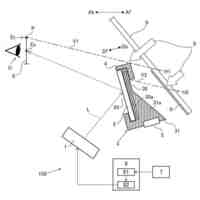
)で割って、車体横すべり角(β)を求めて、視覚センサによって前方注視点へ至る目標経路曲率を求め、その目標経路曲率に横加速度センサ及びヨーレイトセンサによって検出されるカント相当曲率を加えた曲率に対し、前記車輪速による経路曲率とハンドル角による制御式によってハンドル角を制御する慣性航法。
続きを表示(約 410 文字)
【請求項2】
請求項1に記載の慣性航法において、ヨーレイト(γ)を後軸・重心間距離(lr)で割って横速度(v
y
)を求め、この横速度(v
y
)を前後速度(v
x
)で割って、車体横すべり角(β)を検出する慣性航法。
【請求項3】
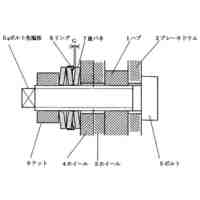
請求項1に記載の慣性航法において、ハンドル角から車輪速に至る伝搬過程の可塑特性(所謂、ハンドル遊び)に対応する相関式を導出する慣性航法。
【請求項4】
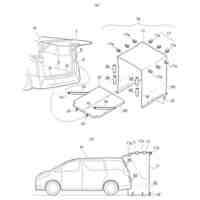
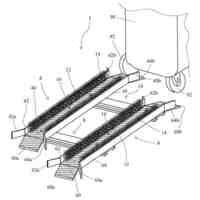
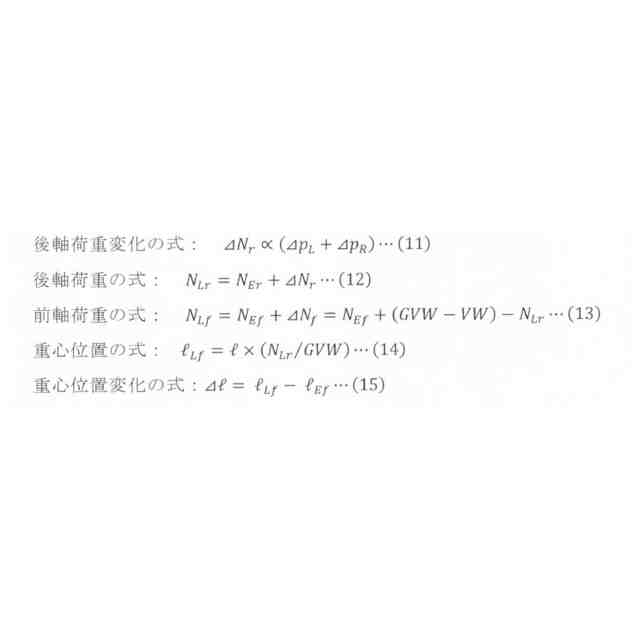
請求項1に記載の慣性航法において、リヤエアスプリングの右エアスプリングのエア回路及び左エアスプリングのエア回路にエア圧センサを備えてその検出エア圧から重心位置を検出する慣性航法。
【請求項5】
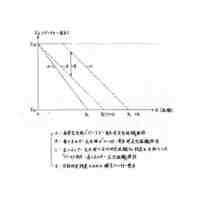
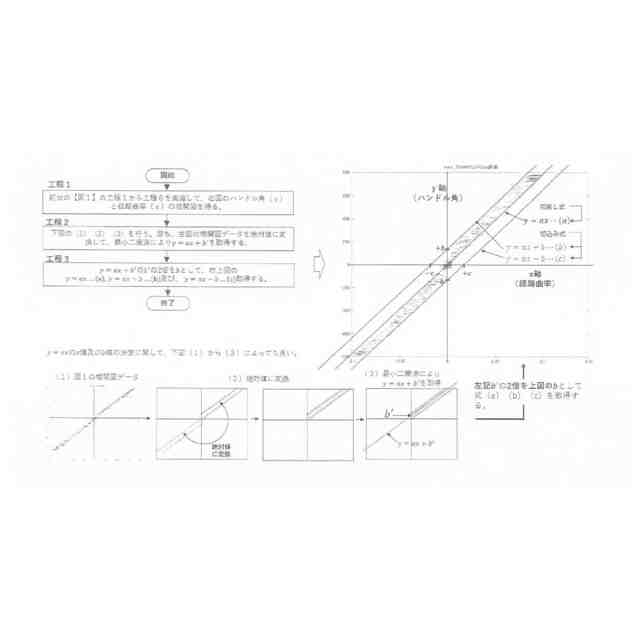
請求項1に記載の慣性航法において、「ハンドル角(y)と経路曲率(x)の相関式を取得する計算工程」、「ハンドル中立位置検出工程」を備える慣性航法。
発明の詳細な説明
【技術分野】
【0001】
本発明は搭載するセンサによって自車位置および速度を検出する慣性航法に関する。
続きを表示(約 1,400 文字)
【0002】
自動車の操舵系には所謂ハンドル遊び(ハンドル角から車輪速に至る伝搬過程の可塑特性)がある。このハンドル遊びは、あて舵など人の運転操作場面で適宜有効であるも、自動運転においては、その進路制御精度の低下要因になる。本発明は、そのハンドル遊びの現実(存在)はそのままにして、求める進路制御精度を得る慣性航法に関する。
【背景技術】
【0003】
自動車のハンドルには遊びがある。ハンドル操作角によって前軸実舵角が変化する。前軸実舵が変化すると、前軸タイヤ横力が生じて前軸が横変位する。その前軸横変位は、前軸懸架を介し、車体を介し、後軸懸架を介して後軸整列変化へと伝搬する。
【0004】
この伝搬過程には、操舵倍力装置(パワーステアリング)があり、前輪の整列機構(フロントホィールアライメント)、前軸の整列機構(フロントアクスルアライメント)、前軸の懸架装置の横変位特性(前軸横力コンプライアンス)、後軸の懸架装置の横変位特性(後軸横力コンプライアンス)が介在する。この伝搬過程に介在する可塑要素が、前記「遊び」の因子になる。その遊び因子のそれぞれに、設計ノウハウが、仕込まれ、車両の走り(操縦性安定性)が設計されている。
【0005】
パワーステアリングには操舵系の剛性を極中心域で低くして外乱抑止性の順流れコンプライアンスステア(Provers Compliance Steer)を実現し、極中心域外で剛性を高くして高い操舵応答性を実現する設計ノウハウが仕込まれている(非特許文献1)。
【0006】
フロントホィールアライメントには、キングピン軸を傾けて重力作用で生じるキングピンリフトトルクを左右輪に生じさせ、その左右つりあいからハンドル中立を定めるほかの設計ノウハウが仕込まれている(非特許文献1)。
【0007】
前軸に順流れコンプライアンスステアが、後軸に逆流れコンプライアンスステアが仕込まれて、直進及び旋回安定性を高める設計ノウハウが仕込まれている(非特許文献2)。
【0008】
ハンドルの遊びは、人の操舵の低い周波数にばね下の高い周波数が載ったヒステリシスを描く。
【0009】
目標到達点(移動目標点)を定めて、そこに至る目標経路の曲率を算出(検出)して、その経路曲率を辿るハンドル角を決める場面において、ハンドル角を決めても、経路曲率はヒステリシス相応の変化(ハンドル遊び)が生じて定まらない。人の運転であれば、視覚等によって相応の変化を捉えて、それ相応の修正操舵が加えられる。
【0010】
この点に関し、特許文献1では、ヒステリシスのため操舵角の大きさによって操舵角÷実舵角の比が変化して特に小舵角域の舵が決めにくい課題を解決し、積載による自重変化による舵の効き変化へ対処する課題を解決し、操舵角を制御して目標コースを描くため、走行方向前方に目標到達点を設定し、この目標到達点までの経路の曲率を前方距離と横偏差距離と進路角と自車両の車体横すべり角から求め、求めた経路の曲率から経路を辿るための実舵角を求め、求めた実舵角に対角線ギヤ比を乗じて必要操舵角を算出して操舵モータを制御することが提案されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
18日前
個人
車窓用防虫網戸
3か月前
個人
警告装置
4か月前
個人
小型EVシステム
4か月前
個人
ルーフ付きトライク
9日前
個人
ホイルのボルト締結
1か月前
日本精機株式会社
ケース
4か月前
個人
車輪清掃装置
2か月前
日本精機株式会社
表示装置
16日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
16日前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
16日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
19日前
個人
アンチロール制御装置
4か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
照明装置
5か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
5か月前
個人
乗合路線バスの客室装置
1か月前
個人
ワイパーゴム性能保持具
2か月前
株式会社松華
懸架装置
5か月前
個人
アクセルのソフトウェア
1か月前
個人
車両用スリップ防止装置
1か月前
個人
キャンピングトレーラー
2か月前
個人
ブレーキシステム
4か月前
井関農機株式会社
収穫作業車両
3か月前
個人
円湾曲ホイール及び球体輪
1か月前
日本精機株式会社
車載表示装置
1か月前
個人
音声ガイド、音声サービス
24日前
株式会社豊田自動織機
産業車両
13日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ