TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128693
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025505
出願日
2024-02-22
発明の名称
作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/20 20060101AFI20250827BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータが煩わしく感じにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供する。
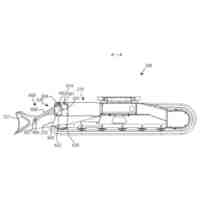
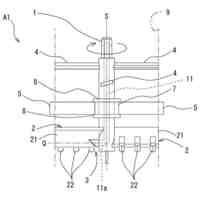
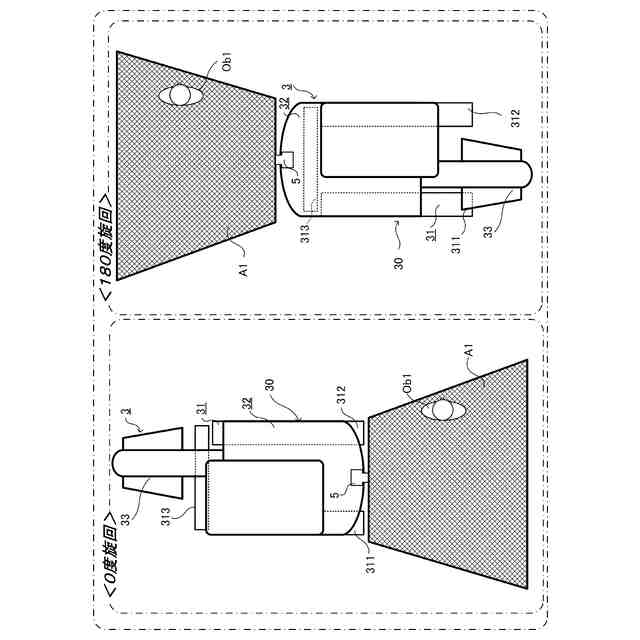
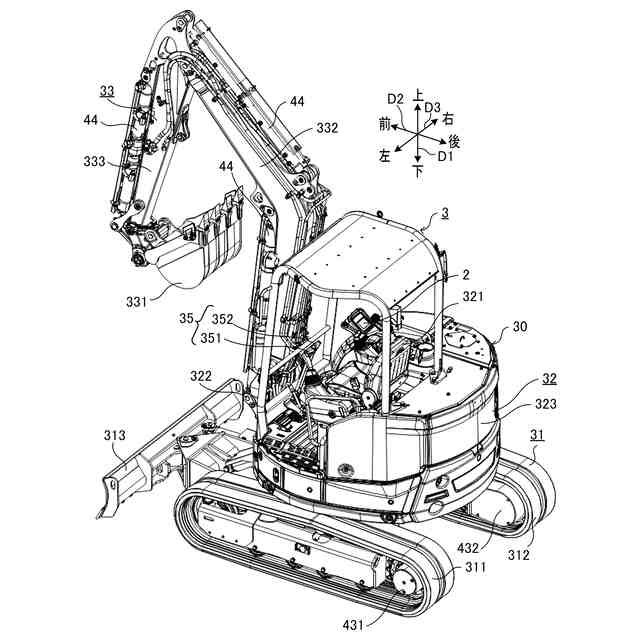
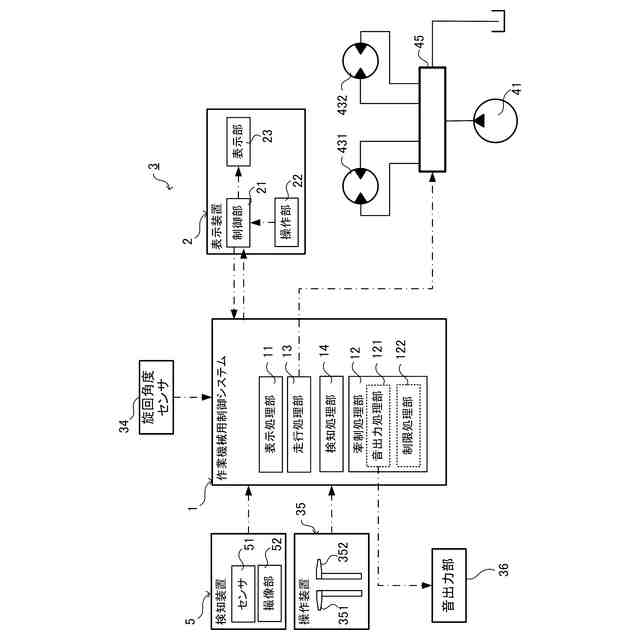
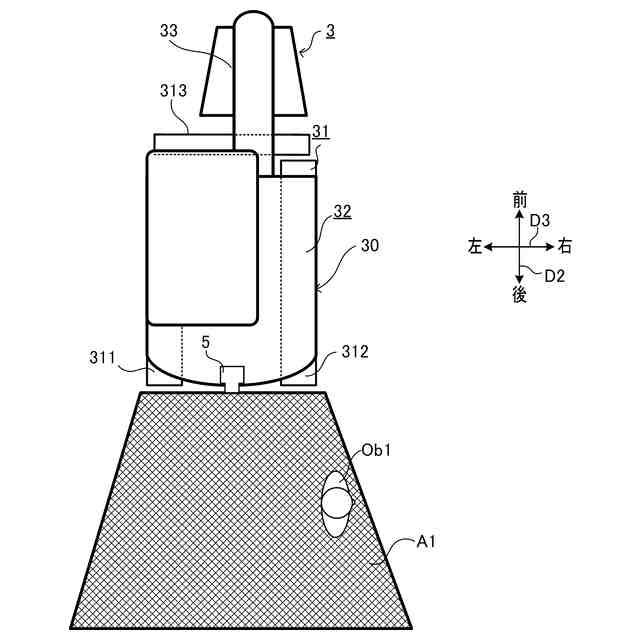
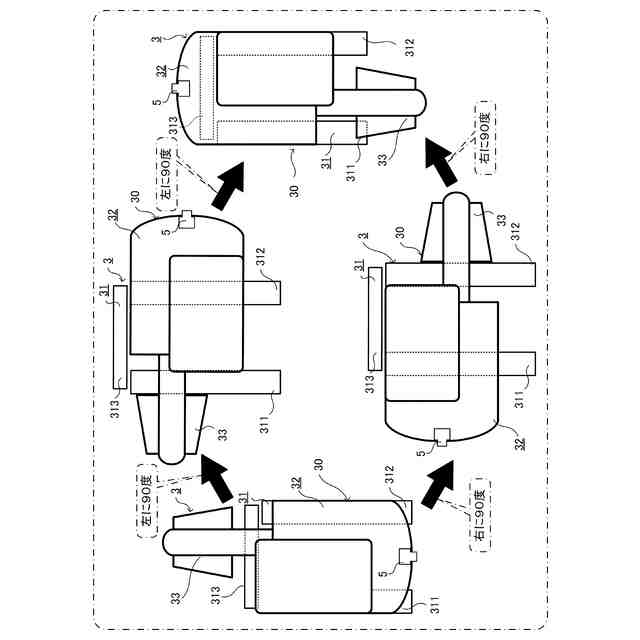
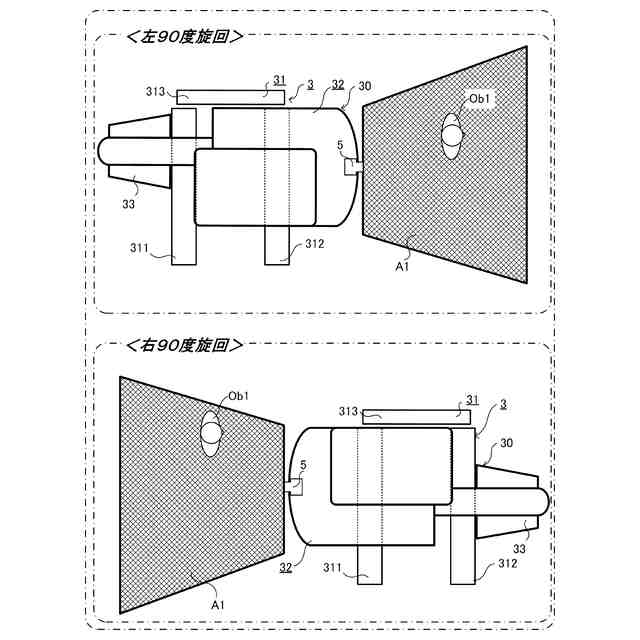
【解決手段】作業機械の制御方法は、走行部31と、旋回部32と、検知装置5と、を備える作業機械3の制御方法であって、検知装置5の検知結果と、旋回部32の旋回角度と、の両方に基づいて、走行部31の動作を牽制すること、を有する。旋回部32は、走行部31の上方に位置し走行部31に対して鉛直方向に沿った回転軸を中心に旋回可能である。検知装置5は、旋回部32に配置されて旋回部32の周囲の監視エリアA1における検知対象物Ob1を検知する。
【選択図】図5
特許請求の範囲
【請求項1】
走行部と、前記走行部の上方に位置し前記走行部に対して鉛直方向に沿った回転軸を中心に旋回可能な旋回部と、前記旋回部に配置されて前記旋回部の周囲の監視エリアにおける検知対象物を検知する検知装置と、を備える作業機械の制御方法であって、
前記検知装置の検知結果と、前記旋回部の旋回角度と、の両方に基づいて、前記走行部の動作を牽制すること、を有する、
作業機械の制御方法。
続きを表示(約 1,000 文字)
【請求項2】
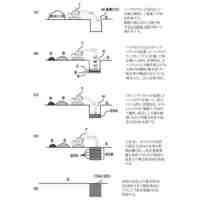
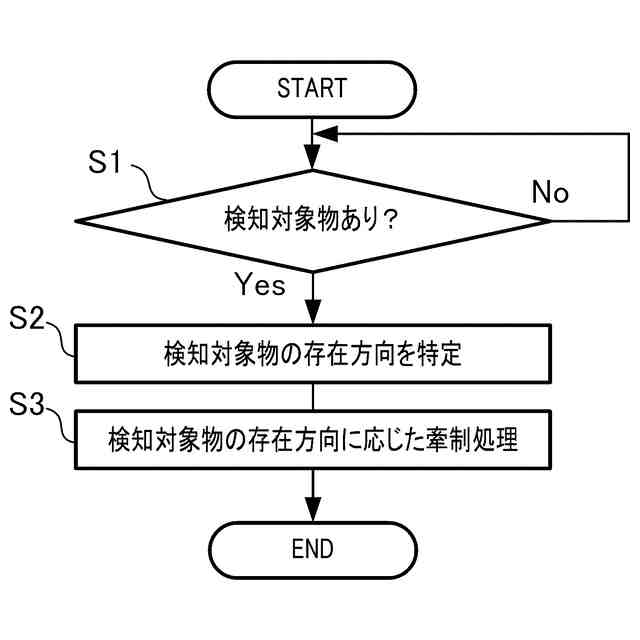
前記監視エリアに前記検知対象物が存在する場合、前記検知装置の検知結果及び前記旋回部の旋回角度から特定される前記走行部から見た前記検知対象物の存在方向に基づいて、前記走行部の動作を牽制する、
請求項1に記載の作業機械の制御方法。
【請求項3】
前記走行部から見た前記検知対象物の存在方向が、前記走行部の移動方向に対応する場合に前記走行部の動作を牽制する、
請求項2に記載の作業機械の制御方法。
【請求項4】
前記走行部から見た前記検知対象物の存在方向は、少なくとも前記走行部から見た前記監視エリアの設定方向に応じて決まる、
請求項2又は3に記載の作業機械の制御方法。
【請求項5】
前記走行部の動作は複数の動作パターンに分類され、
前記複数の動作パターンのうち、前記検知装置の検知結果及び前記旋回部の旋回角度に対応する動作パターンについて、前記走行部の動作を牽制する、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項6】
前記走行部は、少なくとも左走行体及び右走行体を含み、
前記複数の動作パターンは、前記左走行体及び前記右走行体のそれぞれの駆動方向の組み合わせによって規定される、
請求項5に記載の作業機械の制御方法。
【請求項7】
前記走行部の側方に前記検知対象物が存在する場合、前記走行部の旋回動作を牽制する、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項8】
請求項1~3のいずれか1項に記載の作業機械の制御方法を、
1以上のプロセッサに実行させるための作業機械用制御プログラム。
【請求項9】
走行部と、前記走行部の上方に位置し前記走行部に対して鉛直方向に沿った回転軸を中心に旋回可能な旋回部と、前記旋回部に配置されて前記旋回部の周囲の監視エリアにおける検知対象物を検知する検知装置と、を備える作業機械に用いられ、
前記検知装置の検知結果と、前記旋回部の旋回角度と、の両方に基づいて、前記走行部の動作を牽制する牽制処理部を備える、
作業機械用制御システム。
【請求項10】
請求項9に記載の作業機械用制御システムと、
前記走行部及び前記旋回部を含む機体と、を備える、
作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、周囲の監視エリアにおける検知対象物を検知する機能を有する作業機械に用いられる、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
関連技術として、作業機械の周囲に設定された監視エリア(設定領域)内に検知対象物が存在しているか否かを検出する検知装置(周囲監視装置)を備える作業機械が知られている(例えば、特許文献1参照)。関連技術に係る作業機械は、監視エリア内に検知対象物が存在することが検出されているときに、作業機械の走行部(走行装置)を動作させるための走行操作装置が操作されると、走行部の動作を制限する。
【先行技術文献】
【特許文献】
【0003】
特開2021-014736号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記関連技術では、監視エリア内に検知対象物が存在する場合、走行部から見た検知対象物の存在方向によらずに走行部の動作が制限されるため、例えば、検知対象物から離れる向きの走行部の動作も制限され、オペレータが煩わしく感じることがある。
【0005】
本発明の目的は、オペレータが煩わしく感じにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械の制御方法は、走行部と、旋回部と、検知装置と、を備える作業機械の制御方法であって、前記検知装置の検知結果と、前記旋回部の旋回角度と、の両方に基づいて、前記走行部の動作を牽制すること、を有する。前記旋回部は、前記走行部の上方に位置し前記走行部に対して鉛直方向に沿った回転軸を中心に旋回可能である。前記検知装置は、前記旋回部に配置されて前記旋回部の周囲の監視エリアにおける検知対象物を検知する。
【0007】
本発明の一態様に係る作業機械用制御プログラムは、前記作業機械の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【0008】
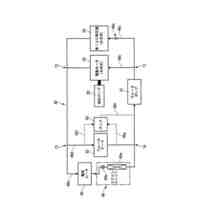
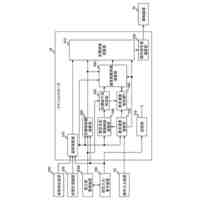
本発明の一態様に係る作業機械用制御システムは、走行部と、旋回部と、検知装置と、を備える作業機械に用いられ、牽制処理部を備える。前記旋回部は、前記走行部の上方に位置し前記走行部に対して鉛直方向に沿った回転軸を中心に旋回可能である。前記検知装置は、前記旋回部に配置されて前記旋回部の周囲の監視エリアにおける検知対象物を検知する。前記牽制処理部は、前記検知装置の検知結果と、前記旋回部の旋回角度と、の両方に基づいて、前記走行部の動作を牽制する。
【0009】
本発明の一態様に係る作業機械は、前記作業機械用制御システムと、前記走行部及び前記旋回部を含む機体と、を備える。
【発明の効果】
【0010】
本発明によれば、オペレータが煩わしく感じにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
大都市防災設備
18日前
日立建機株式会社
作業機械
24日前
大成建設株式会社
新設構造物
23日前
個人
水底地盤の天地返し工法と専用作業船
20日前
日立建機株式会社
建設機械
25日前
日本車輌製造株式会社
建設機械
1か月前
株式会社大林組
基礎構造
20日前
ヤンマーホールディングス株式会社
作業機械
23日前
日立建機株式会社
作業機械
1か月前
株式会社クボタ
作業機
1か月前
株式会社本久
改良地盤構築方法
1か月前
ヤンマーホールディングス株式会社
作業機械
13日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
16日前
住友金属鉱山株式会社
タンク設置用基礎
13日前
株式会社地盤改良堀田
基礎杭の設置方法
17日前
前田工繊株式会社
繊維製布団篭
1か月前
株式会社大林組
改良土の品質管理方法
25日前
株式会社山幸総建
シートパイルの土砂除去具
18日前
株式会社フジタ
建築物とその施工方法
1か月前
有限会社 櫂設計事務所
掘削・撹拌具
4日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
日本精機株式会社
施工管理システム及び施工管理方法
1か月前
株式会社日立建機ティエラ
建設機械
17日前
アロン化成株式会社
排水管通気設備
18日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
12日前
日本車輌製造株式会社
建設機械の組立方法
13日前
アクアインテック株式会社
メーターボックスの蓋
23日前
株式会社丸和
連結金具セット、及び連結方法
1か月前
日立建機株式会社
作業機械
12日前
日本車輌製造株式会社
取付具
1か月前
西松建設株式会社
護岸ブロック及び護岸構造物
1か月前
株式会社 CUP商会
仮補強リングの使用方法
1か月前
株式会社小松製作所
作業機械
5日前
JFEスチール株式会社
モノパイル
6日前
戸田建設株式会社
基礎構造
13日前
PCサポート株式会社
盛土構造体の構築方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ