TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128886
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025871
出願日
2024-02-22
発明の名称
警備システム、サーバ、警備装置及び作業ロボット
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G08B
25/00 20060101AFI20250827BHJP(信号)
要約
【課題】作業ロボットが所定の作業を実施する作業区画の警備をより適切に運用することが可能な警備システム、サーバ、警備装置及び作業ロボットを提供する。
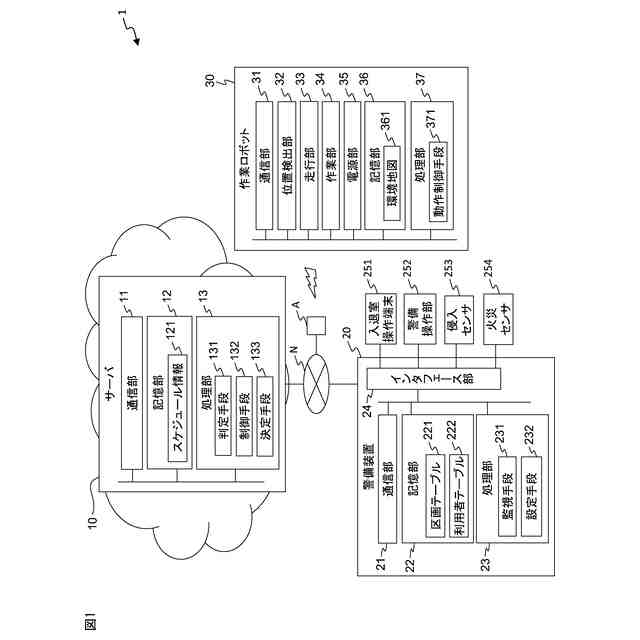
【解決手段】警備システムは、自律移動可能で、作業区画において所定の作業を実施する作業ロボットと、設定された警備モードに基づき移動体を監視する警備装置と、を有する警備システムであって、
警備装置に設けられ、作業区画を含む監視対象を監視し、警備状態を検出する監視手段と、監視手段により検出された警備状態に基づいて、作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、判定手段による判定結果に基づいて、作業ロボットが所定の作業を実施するための、作業区画の警備モードの変更の可否を決定する決定手段と、を有する。
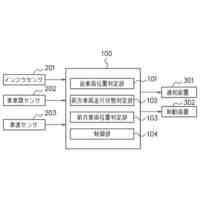
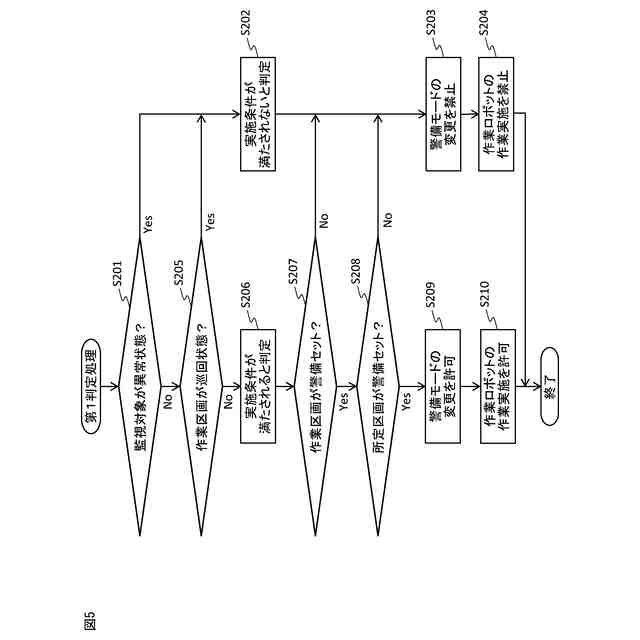
【選択図】図5
特許請求の範囲
【請求項1】
自律移動可能で、作業区画において所定の作業を実施する作業ロボットと、設定された警備モードに基づき移動体を監視する警備装置と、を有する警備システムであって、
前記警備装置に設けられ、前記作業区画を含む監視対象を監視し、警備状態を検出する監視手段と、
前記監視手段により検出された警備状態に基づいて、前記作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、
前記判定手段による判定結果に基づいて、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更の可否を決定する決定手段と、
を有することを特徴とする警備システム。
続きを表示(約 1,700 文字)
【請求項2】
前記判定手段は、前記警備状態が、前記監視対象において異常が検知されている状態、又は、前記作業区画において所定の警備行動が実施されている状態である場合、前記実施条件が満たされないと判定する、請求項1に記載の警備システム。
【請求項3】
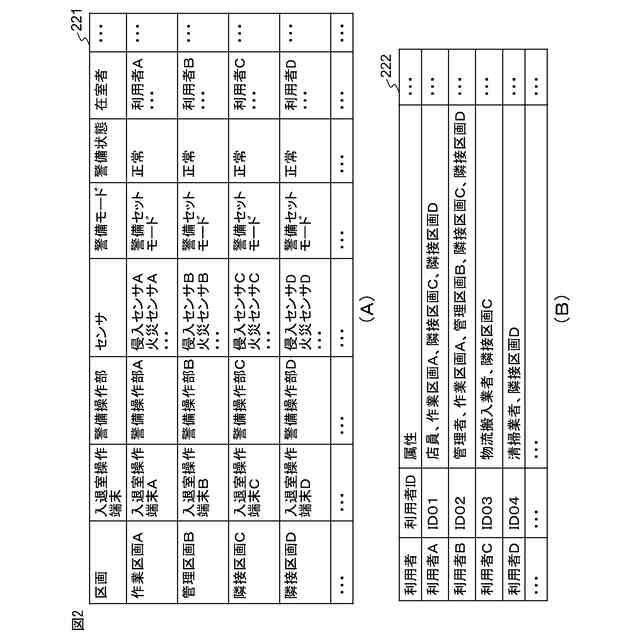
前記警備装置は、複数の警備モードを切り替えて設定する設定手段をさらに有し、
前記決定手段は、前記作業区画において設定された警備モードにさらに基づいて、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更の可否を決定する、請求項1または2に記載の警備システム。
【請求項4】
前記決定手段は、前記実施条件が満たされ、且つ、前記作業区画において設定された警備モードが警備セットモードである場合、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更を許可する、請求項3に記載の警備システム。
【請求項5】
前記決定手段は、前記実施条件が満たされ、且つ、前記作業区画において設定された警備モード、及び、前記作業区画外の所定区画において設定された警備モードの両方が警備セットモードである場合、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更を許可する、請求項3に記載の警備システム。
【請求項6】
前記決定手段は、前記実施条件が満たされない場合、前記作業区画において設定された警備モードによらず、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更を禁止する、請求項3に記載の警備システム。
【請求項7】
前記決定手段は、さらに、前記作業ロボットの作業実施中に前記作業区画への入室操作が実行されたか否かに基づいて、前記作業ロボットの作業終了時における前記作業区画の警備モードの変更の可否を決定する、請求項3に記載の警備システム。
【請求項8】
自律移動可能で、作業区画において所定の作業を実施する作業ロボット、及び、前記作業区画を含む監視対象を監視し、警備状態を検出する警備装置と通信可能に接続されたサーバであって、
警備装置から、前記検出された警備状態を受信する通信手段と、
前記検出された警備状態に基づいて、前記作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、
前記判定手段による判定結果に基づいて、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更の可否を決定する決定手段と、
を有することを特徴とするサーバ。
【請求項9】
自律移動可能で、作業区画において所定の作業を実施する作業ロボットと通信可能に接続され、設定された警備モードに基づき移動体を監視する警備装置であって、
前記作業区画を含む監視対象を監視し、警備状態を検出する監視手段と、
前記監視手段により検出された警備状態に基づいて、前記作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、
前記判定手段による判定結果に基づいて、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更の可否を決定する決定手段と、
を有することを特徴とする警備装置。
【請求項10】
作業ロボットの作業区画を含む監視対象を監視し、警備状態を検出する警備装置と通信可能に接続された、自律移動可能で、前記作業区画において所定の作業を実施する作業ロボットであって、
警備装置から、前記検出された警備状態を受信する通信手段と、
前記検出された警備状態に基づいて、前記作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、
前記判定手段による判定結果に基づいて、前記作業ロボットが前記所定の作業を実施するための、前記作業区画の警備モードの変更の可否を決定する決定手段と、
を有することを特徴とする作業ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、警備システム、サーバ、警備装置及び作業ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、作業区画において所定の作業を実施する作業ロボットと、作業区画を含む監視対象を監視する警備装置とを有する警備システムが開発されている。
【0003】
例えば、特許文献1には、自走式の電気掃除機が移動中である場合に、人感センサの検知結果の情報を無効にすることにより、電気掃除機の移動による誤報を抑制する監視システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-54393号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業ロボットと警備装置を有する警備システムにおいて、作業ロボットが所定の作業を実施する作業区画の警備をより適切に運用することが求められている。
【0006】
本発明の目的は、作業ロボットが所定の作業を実施する作業区画の警備をより適切に運用することが可能な警備システム、サーバ、警備装置及び作業ロボットを提供することである。
【課題を解決するための手段】
【0007】
かかる課題を解決するための本発明の一態様によれば、自律移動可能で、作業区画において所定の作業を実施する作業ロボットと、設定された警備モードに基づき移動体を監視する警備装置と、を有する警備システムであって、警備装置に設けられ、作業区画を含む監視対象を監視し、警備状態を検出する監視手段と、監視手段により検出された警備状態に基づいて、作業ロボットによる作業の実施条件が満たされるか否かを判定する判定手段と、判定手段による判定結果に基づいて、作業ロボットが所定の作業を実施するための、作業区画の警備モードの変更の可否を決定する決定手段と、を有する警備システムを提供する。
【0008】
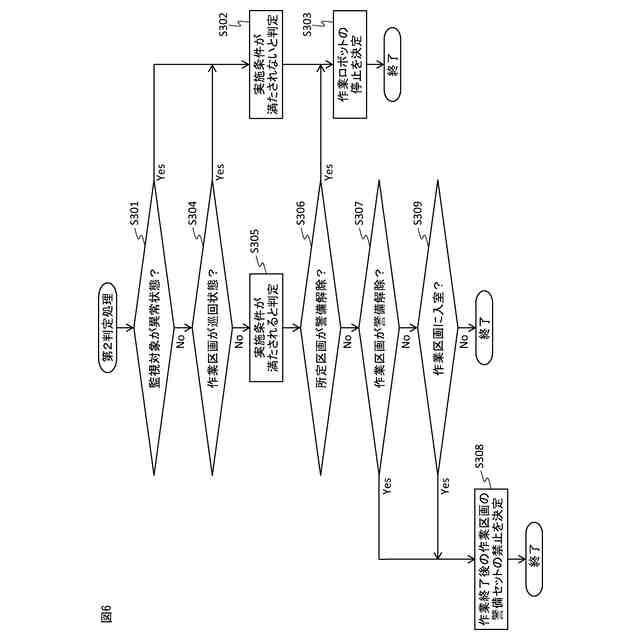
この警備システムにおいて、判定手段は、警備状態が、監視対象において異常が検知されている状態、又は、作業区画において所定の警備行動が実施されている状態である場合、実施条件が満たされないと判定することが好ましい。
【0009】
この警備システムにおいて、警備装置は、複数の警備モードを切り替えて設定する設定手段をさらに有し、決定手段は、作業区画において設定された警備モードにさらに基づいて、作業ロボットが所定の作業を実施するための、作業区画の警備モードの変更の可否を決定することが好ましい。
【0010】
この警備システムにおいて、決定手段は、実施条件が満たされ、且つ、作業区画において設定された警備モードが警備セットモードである場合、作業ロボットが所定の作業を実施するための、作業区画の警備モードの変更を許可することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
22日前
セコム株式会社
火災監視システム
29日前
セコム株式会社
表示機能付き認証装置
22日前
セコム株式会社
生活見守りシステム及びプログラム
22日前
セコム株式会社
データ処理装置及びデータ処理方法
29日前
セコム株式会社
生活見守りシステム及びプログラム
22日前
セコム株式会社
自律移動ロボットおよび制御システム
22日前
セコム株式会社
自律移動ロボットおよび制御システム
22日前
セコム株式会社
対話システム、対話方法及びセンタ装置
1か月前
セコム株式会社
センタ装置、対話システム及び対話方法
1か月前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
22日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
22日前
株式会社デンソーウェーブ
通行管理システム
23日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
23日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
23日前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
23日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
22日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
22日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
22日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
22日前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
25日前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
4日前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
4日前
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
1か月前
日本精機株式会社
警報システム
2か月前
個人
自動電動車椅子
1か月前
株式会社SUBARU
車両
23日前
スズキ株式会社
運転支援装置
2か月前
エムケー精工株式会社
車両誘導装置
2か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
個人
磁気路上での車両の路線離脱防御
1か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
株式会社国際電気
防災システム
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ