TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154621
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057729
出願日
2024-03-29
発明の名称
自律移動ロボットおよび制御システム
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/617 20240101AFI20251002BHJP(制御;調整)
要約
【課題】人物との相乗り乗車を適切に制御することができる自律移動ロボットを提供する。
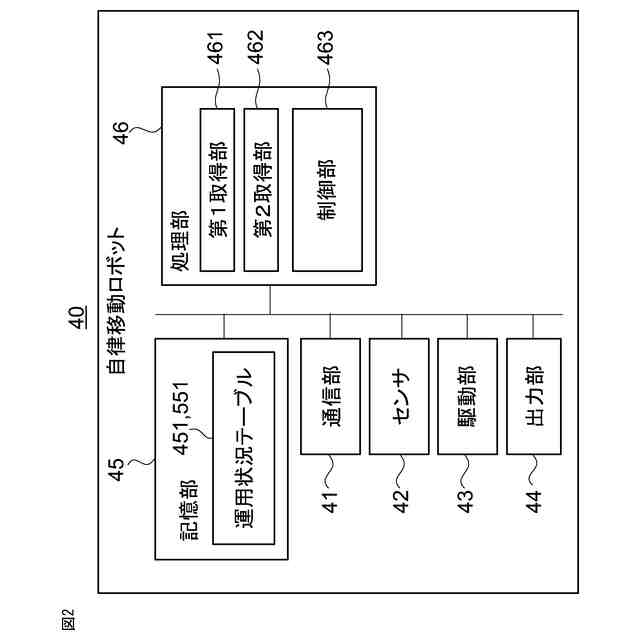
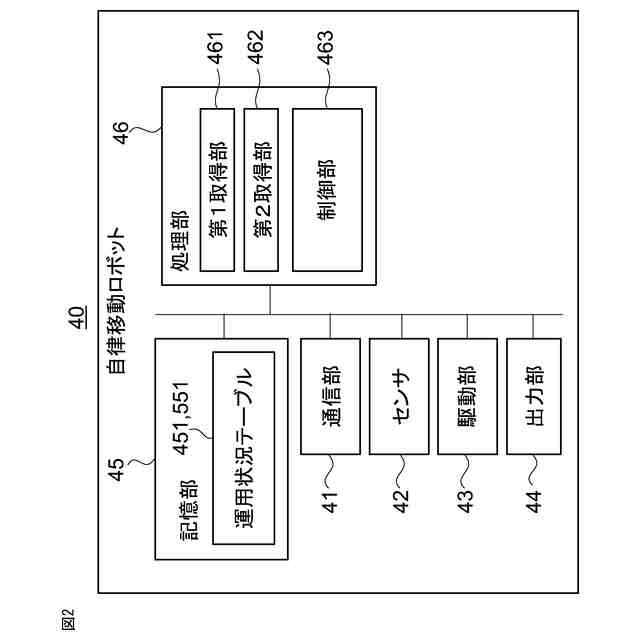
【解決手段】エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、自律移動ロボットの現在の作業内容を取得する第1取得部と、エレベータの乗りかご内の人物の在否状況を取得する第2取得部と、作業内容および在否状況に基づいて人物との相乗り乗車を制御する制御部と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、
前記自律移動ロボットの現在の作業内容を取得する第1取得部と、
前記エレベータの乗りかご内の人物の在否状況を取得する第2取得部と、
前記作業内容および前記在否状況に基づいて人物との相乗り乗車を制御する制御部と、
を有することを特徴とする自律移動ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記在否状況が前記乗りかご内に人物が存在することを示す場合、前記作業内容が通常作業であるときは前記自律移動ロボットの前記乗りかごへの乗車を規制し、前記作業内容が非常作業であるときは前記自律移動ロボットの前記乗りかごへの乗車を許容する、
ことを特徴とする請求項1に記載の自律移動ロボット。
【請求項3】
前記通常作業は、所定の作業スケジュールを基に行われる作業であって、
前記制御部は、前記在否状況が前記乗りかご内に人物が存在することを示す場合、前記作業内容が通常作業であっても、前記作業スケジュールの遅延状況に応じて、前記自律移動ロボットの前記乗りかごへの乗車を許容する、
ことを特徴とする請求項2に記載の自律移動ロボット。
【請求項4】
前記制御部は、前記通常作業において、前記在否状況が前記乗りかご内に前記自律移動ロボットの乗車空間が有ることを示す場合であって、前記自律移動ロボットの乗車空間の面積が所定の面積以上あることを示す場合は前記乗りかごへの乗車を許容し、当該乗車空間の面積が所定の面積未満であることを示す場合は前記乗りかごへの乗車を禁止する、
ことを特徴とする請求項2に記載の自律移動ロボット。
【請求項5】
周囲の人物に対して所定のメッセージを報知する出力部を有し、
前記制御部は、前記作業内容が非常作業であり、かつ、前記在否状況が前記乗りかご内に前記自律移動ロボットの乗車空間が無いことを示す場合、前記出力部を介して前記乗りかご内の人物に前記乗りかごからの降車を指示する、
ことを特徴とする請求項2に記載の自律移動ロボット。
【請求項6】
周囲の人物に対して所定のメッセージを報知する出力部を有し、
前記制御部は、前記作業内容が非常作業のうち人物に対して危険が及ぶ可能性のある作業であり、かつ、前記在否状況が前記乗りかご内に人物が存在することを示す場合、前記出力部を介して前記乗りかご内の人物に前記乗りかごからの降車を指示する、
ことを特徴とする請求項2に記載の自律移動ロボット。
【請求項7】
エレベータを利用して複数の階の間を移動可能な自律移動ロボットを制御する制御システムであって、
前記自律移動ロボットの現在の作業内容を取得する第1取得部と、
前記エレベータの乗りかご内の人物の在否状況を取得する第2取得部と、
前記作業内容および前記在否状況に基づいて、前記エレベータの乗りかごにおける人物との相乗り乗車を制御する制御部と、
を備えることを特徴とする制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットおよび制御システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、建物等において予め定められた巡回ルートを自律移動し、巡回ルート上の歩行者や障害物を自動的に避けて移動する自律移動ロボットが開発されている。
【0003】
特許文献1には、エレベータの乗りかごの行先予定リストに基づいてロボットが乗りかごに乗車可能か否かを判断することが開示されている。特許文献2には、自律走行ロボットの乗車空間有無判別手段が乗車空間ありと判別した場合に自律走行ロボットをエレベータのかごに乗車させる自律走行ロボットの制御システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-129536号公報
特開2011-88721号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自律移動ロボットについて、エレベータを利用して移動する際、自律移動ロボットと人物との相乗り乗車を適切に制御することが望まれている。
【0006】
本発明の目的は、人物との相乗り乗車を適切に制御することができる自律移動ロボットおよび制御システムを提供することにある。
【課題を解決するための手段】
【0007】
かかる課題を解決するため本発明は、エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、自律移動ロボットの現在の作業内容を取得する第1取得部と、エレベータの乗りかご内の人物の在否状況を取得する第2取得部と、作業内容および在否状況に基づいて人物との相乗り乗車を制御する制御部と、を有する。
【0008】
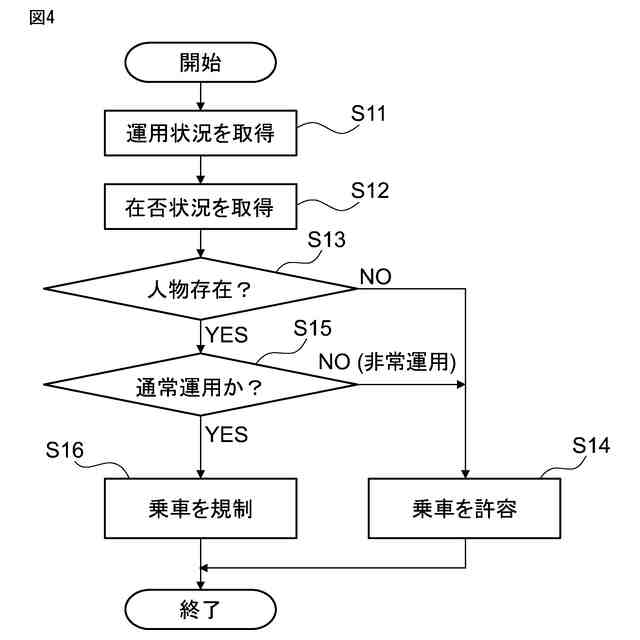
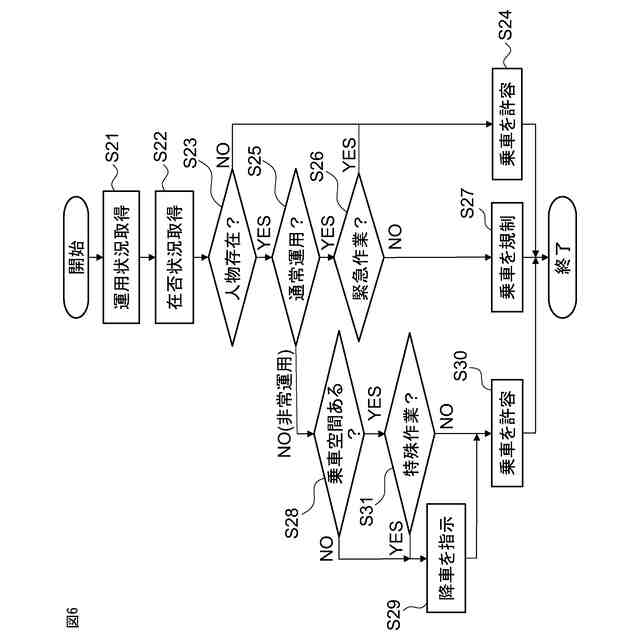
この自律移動ロボットにおいて、制御部は、在否状況が乗りかご内に人物が存在することを示す場合、作業内容が通常作業であるときは自律移動ロボットの乗りかごへの乗車を規制し、作業内容が非常作業であるときは自律移動ロボットの乗りかごへの乗車を許容することが好適である。
【0009】
この自律移動ロボットにおいて、通常作業は、所定の作業スケジュールを基に行われる作業であって、制御部は、在否状況が前記乗りかご内に人物が存在することを示す場合、作業内容が通常作業であっても、作業スケジュールの遅延状況に応じて、自律移動ロボットの乗りかごへの乗車を許容することが好適である。
【0010】
この自律移動ロボットにおいて、制御部は、通常作業において、在否状況が乗りかご内に自律移動ロボットの乗車空間が有ることを示す場合であって、自律移動ロボットの乗車空間の面積が所定の面積以上あることを示す場合は乗りかごへの乗車を許容し、当該乗車空間の面積が所定の面積未満であることを示す場合は乗りかごへの乗車を禁止することが好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
18日前
セコム株式会社
火災監視システム
25日前
セコム株式会社
表示機能付き認証装置
18日前
セコム株式会社
生活見守りシステム及びプログラム
18日前
セコム株式会社
データ処理装置及びデータ処理方法
25日前
セコム株式会社
生活見守りシステム及びプログラム
18日前
セコム株式会社
自律移動ロボットおよび制御システム
18日前
セコム株式会社
自律移動ロボットおよび制御システム
18日前
セコム株式会社
対話システム、対話方法及びセンタ装置
26日前
セコム株式会社
センタ装置、対話システム及び対話方法
26日前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
26日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
18日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
18日前
株式会社デンソーウェーブ
通行管理システム
19日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
19日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
19日前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
19日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
18日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
18日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
18日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
18日前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
21日前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
今日
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
今日
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
1か月前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
29日前
ローム株式会社
基準電圧源
1か月前
株式会社熊谷組
障害物の検出方法
20日前
株式会社FUJI
加工機械ライン
3か月前
愛知製鋼株式会社
車両用システム
2か月前
新電元工業株式会社
作業用ロボット
18日前
個人
作業車両自動化システム
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ