TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025133941
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2025117254,2023219788
出願日
2025-07-11,2018-10-01
発明の名称
判定装置及び判定方法並びに判定用プログラム
出願人
パイオニア株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
主分類
G08G
1/16 20060101AFI20250904BHJP(信号)
要約
【課題】側線上の車両が本線に合流する場合において、安全且つ確実に当該車両を本線に進入させて合流させることが可能な判定装置を提供する。
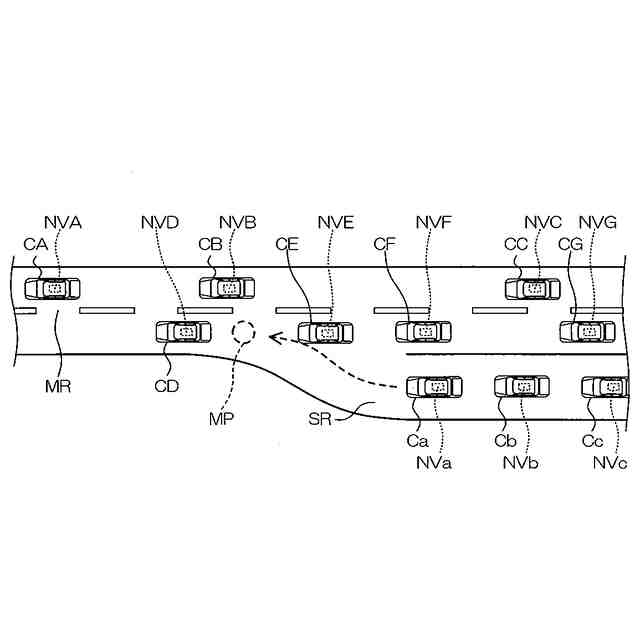
【解決手段】車両CA等が走行する本線MRに合流する側線SRを走行する車両Ca等及び車両CA等の車両状態をそれぞれ示す情報を取得し、それに基づいて、車両Ca等が進入可能な車両CA等車間を生成する場合に各車両CA等に加わる加速度に基づいて車両CA等に間隔を生成させて、進入する車両Ca等をその車間の位置に移動させる。
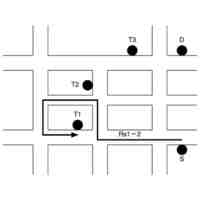
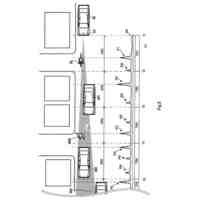
【選択図】図2
特許請求の範囲
【請求項1】
第1道路を同じ方向に移動する複数の第1移動体各々の移動状態と、前記第1道路に合流する第2道路を移動しており、前記第1道路へ進入して前記方向へ移動予定の第2移動体の移動状態と、を示す状態情報を取得する取得手段と、
前記状態情報と、前記第2移動体が前記第1道路に進入可能となる間隔の生成のために前記第1移動体の少なくとも1つに加えられる加速度と、に基づき、前記間隔の生成が可能かどうかを判定する判定手段と、
を備えることを特徴とする判定装置。
発明の詳細な説明
【技術分野】
【0001】
本願は、判定装置及び判定方法並びに判定用プログラムの技術分野に属する。より詳細には、第1道路に合流する第2道路を移動する車両等の第2移動体を当該第1道路へ進入させ、第1道路を移動する車両等の第1移動体の列に合流させるための判定を行う判定装置及び判定方法並びに当該判定装置用のプログラムの技術分野に属する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、車両の自動運転に関する研究開発が盛んである。このような自動運転を更に普及させるためには、例えば側線と本線のような合流地点でスムーズに車両同士が合流できるようにすることも必要である。そしてこのための従来技術の一例として、下記特許文献1に記載された技術がある。この特許文献1に記載されている技術では、本線を走行する基準車両とその前後の車両、即ち本線を走行する複数の車両の走行状態(例えば車速や車間距離等)と側線を走行する車両の位置及び合流速度等を加味して、本線上の車両同士が接近することなく、側線上の車両が本線へ合流する構成とされている。
【先行技術文献】
【特許文献】
【0003】
特開2010-170385号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されている技術を前提とするとしても、側線から本線へ車両が進入して本線上の車両の列に合流する場合、本線を走行中の車両の安全に加えて、側線を走行する車両がスムーズに進入して合流できることが必須となる。
【0005】
また、側線上を走行してこれから本線に進入して合流しようとする車両の運転者の運転技術が低い場合等であってもスムーズに進入及び合流ができるようにしなければ、側線における渋滞を招来する可能性もあるという問題点があった。
【0006】
そこで本願は、上記の要請及び問題点に鑑みて為されたもので、その課題の一例は、側線上の車両が本線に合流する場合において、スムーズ且つ確実に当該車両を本線に進入させるために必要な判定を行うことが可能な判定装置及び判定方法並びに当該判定装置用のプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、請求項1に記載の発明は、第1道路を同じ方向に移動する複数の第1移動体各々の移動状態と、前記第1道路に合流する第2道路を移動しており、前記第1道路へ進入して前記方向へ移動予定の第2移動体の移動状態と、を示す状態情報を取得する取得手段と、前記状態情報に基づいた加速度であり、且つ、前記第2移動体が前記第1道路に進入可能となる間隔の生成のために前記第1移動体の少なくとも1つに加えられる加速度に基づき、前記間隔の生成が可能かどうかを判定する判定手段と、を備える。
【0008】
上記の課題を解決するために、請求項9に記載の発明は、取得手段と、判定手段と、を備える判定装置において実行される判定方法であって、第1道路を同じ方向に移動する複数の第1移動体各々の移動状態と、前記第1道路に合流する第2道路を移動しており、前記第1道路へ進入して前記方向へ移動予定の第2移動体の移動状態と、を示す状態情報を前記取得手段により取得する取得工程と、前記状態情報に基づいた加速度であり、且つ、前記第2移動体が前記第1道路に進入可能となる間隔の生成のために前記第1移動体の少なくとも1つに加えられる加速度に基づき、前記間隔の生成が可能かどうかを前記判定手段により判定する判定工程と、を含む。
【0009】
上記の課題を解決するために、請求項10に記載の発明は、コンピュータを、請求項1から請求項8のいずれか一項に記載の判定装置として機能させる。
【図面の簡単な説明】
【0010】
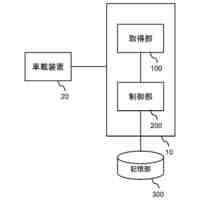
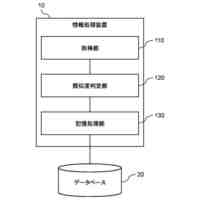
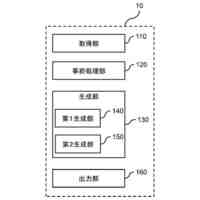
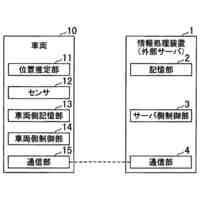
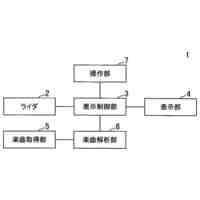
実施形態に係る判定装置の概要構成を示すブロック図である。
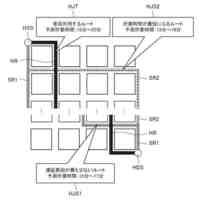
第1実施例に係る道路の合流状態を例示する上方視概念図である。
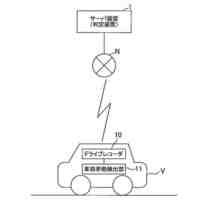
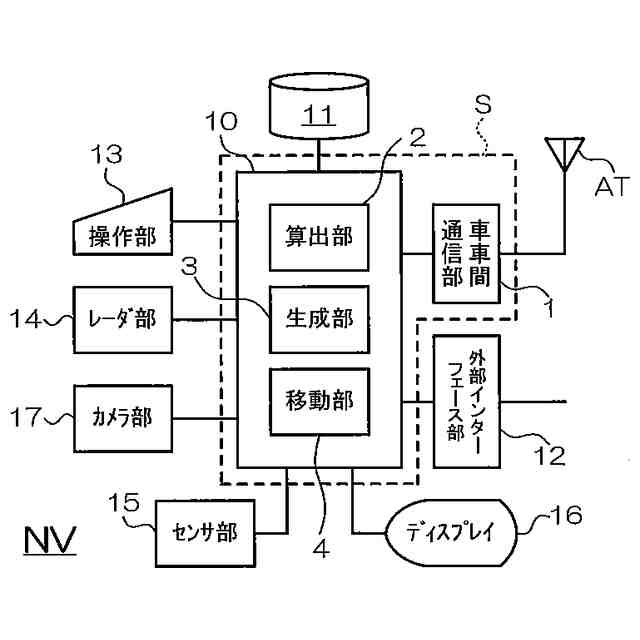
第1実施例に係るナビゲーション装置の概要構成を示すブロック図である。
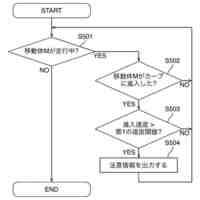
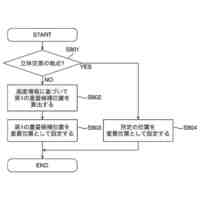
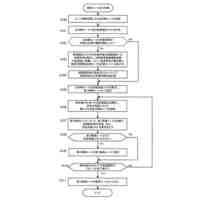
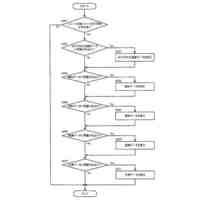
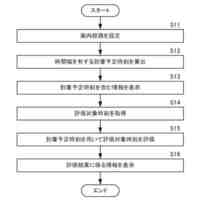
第1実施例に係る合流制御の全体を示すフローチャートである。
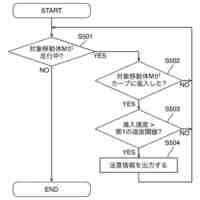
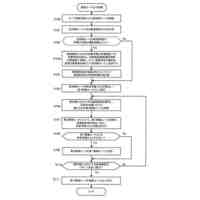
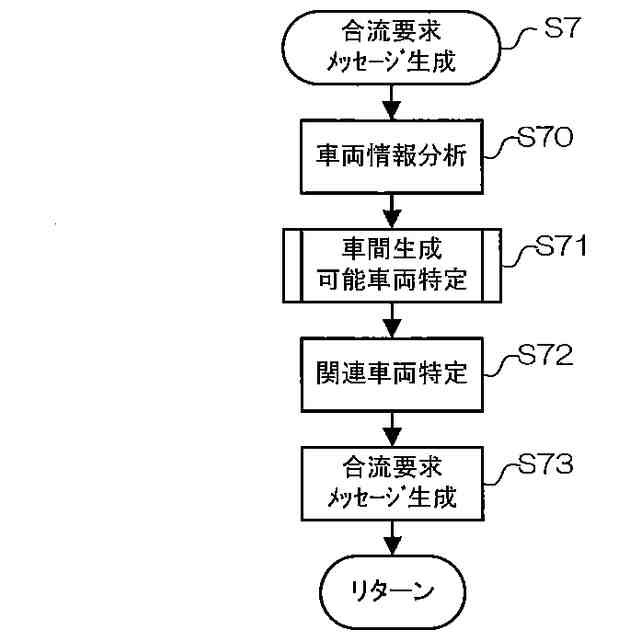
第1実施例に係る合流制御の細部を示すフローチャートである。
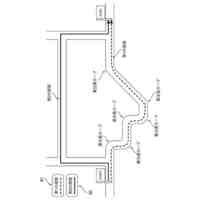
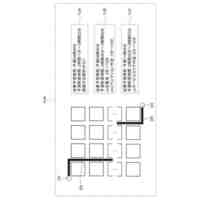
第1実施例に係る合流制御の状態を示す上方視概念図であり、(a)は第1実施例に係る合流制御が実行されない場合の状態を示す上方視概念図であり、(b)は第1実施例に係る合流制御が実行された結果を示す上方視概念図である。
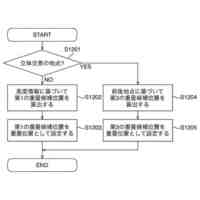
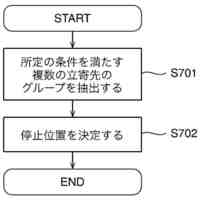
第2実施例に係る合流制御を示すフローチャートである。
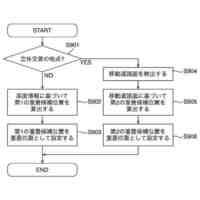
第2実施例に係る合流制御の細部を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
通信装置
5日前
パイオニア株式会社
通信装置
5日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
情報処理装置
2日前
パイオニア株式会社
ルームミラー装置
2日前
パイオニア株式会社
ルームミラー装置
2日前
パイオニア株式会社
通信装置、ヘルメット
5日前
パイオニア株式会社
制御装置、制御方法、及びプログラム
2日前
パイオニア株式会社
検索装置、検索方法、及びプログラム
2日前
パイオニア株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
パイオニア株式会社
車両監視装置、車両監視方法、及びプログラム
2日前
パイオニア株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
5日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
5日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
5日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
2日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
2日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
2日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
5日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
5日前
パイオニア株式会社
判定装置
22日前
パイオニア株式会社
取付機構
29日前
パイオニア株式会社
ライダ装置
20日前
パイオニア株式会社
サーバ装置
27日前
パイオニア株式会社
距離算出装置
1か月前
パイオニア株式会社
情報処理装置
27日前
パイオニア株式会社
情報処理装置
22日前
パイオニア株式会社
状況出力装置
1か月前
パイオニア株式会社
表示制御装置
2日前
パイオニア株式会社
表示制御装置
20日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ