TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025137080
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024036075
出願日
2024-03-08
発明の名称
作業車両
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
E02F
9/20 20060101AFI20250911BHJP(水工;基礎;土砂の移送)
要約
【課題】一部の直進用動力が旋回用電動モータと連結される旋回用動力の伝達経路に流入しても、作業車両の直進性を確保することができる技術を提供する。
【解決手段】作業車両は、直進用動力を発生させる直進用電動モータと、旋回用動力を発生させる旋回用電動モータと、を備える。直進用電動モータの駆動による直進走行時において、旋回用電動モータの回転数は、旋回用電動モータの目標回転数との間に差が生じると、目標回転数に復帰する。
【選択図】図6
特許請求の範囲
【請求項1】
直進用動力を発生させる直進用電動モータと、
旋回用動力を発生させる旋回用電動モータと、を備え、
前記直進用電動モータの駆動による直進走行時において、
前記旋回用電動モータの回転数は、前記旋回用電動モータの目標回転数との間に差が生じると、前記目標回転数に復帰する、作業車両。
続きを表示(約 490 文字)
【請求項2】
前記直進用電動モータの駆動による直進走行時において、
前記旋回用電動モータは、停止状態から回転状態に移行されると、前記停止状態に復帰する、請求項1に記載の作業車両。
【請求項3】
前記旋回用電動モータに供給される電力を蓄えるバッテリを備え、
前記旋回用電動モータは、
前記回転状態において、前記バッテリからの電力供給が行われ、
前記停止状態において、前記バッテリからの電力供給が遮断される、請求項2に記載の作業車両。
【請求項4】
前記停止状態は、前記旋回用電動モータが許容回転数未満で回転している状態を含む、請求項3に記載の作業車両。
【請求項5】
前記旋回用電動モータは、前記バッテリからの電力供給の開始後、所定時間が経過すると、前記バッテリからの電力供給が遮断される、請求項3又は4に記載の作業車両。
【請求項6】
前記所定時間内において、前記旋回用電動モータの回転数を徐々に下げて、前記旋回用電動モータを前記停止状態に復帰させる、請求項5に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
走行用の駆動源として電動モータを備える作業車両が従来技術として知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-48585号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年では、直進用動力を発生させる直進用電動モータと、旋回用動力を発生させる旋回用電動モータとをそれぞれ備える作業車両も提案されている。このような作業車両が直進用電動モータの駆動によって直進走行しているときに、例えば、一部の直進用動力が、意図せず、旋回用電動モータと連結される旋回用動力の伝達経路に流入すると、この動力が旋回用動力として機能する場合がある。この場合、意図しない旋回用動力が発生し、作業車両の直進走行が妨げられる虞がある。
【0005】
本発明は、上記の問題点を解決するためになされたものであり、その目的は、一部の直進用動力が旋回用電動モータと連結される旋回用動力の伝達経路に流入しても、作業車両の直進性を確保することができる技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一側面に係る作業車両は、直進用動力を発生させる直進用電動モータと、旋回用動力を発生させる旋回用電動モータと、を備え、前記直進用電動モータの駆動による直進走行時において、前記旋回用電動モータの回転数は、前記旋回用電動モータの目標回転数との間に差が生じると、前記目標回転数に復帰する。
【発明の効果】
【0007】
上記の構成によれば、一部の直進用動力が旋回用電動モータと連結される旋回用動力の伝達経路に流入しても、作業車両の直進性を確保することができる。
【図面の簡単な説明】
【0008】
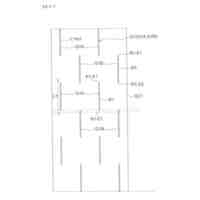
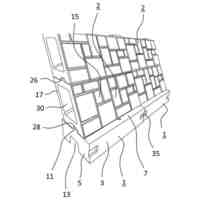
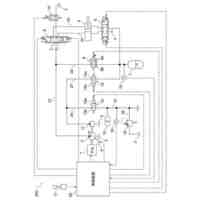
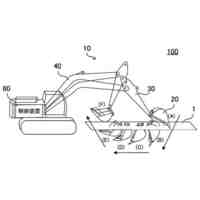
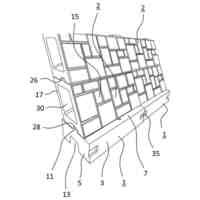
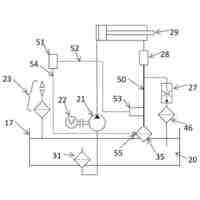
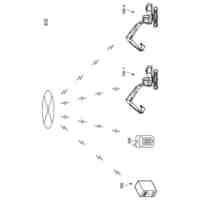
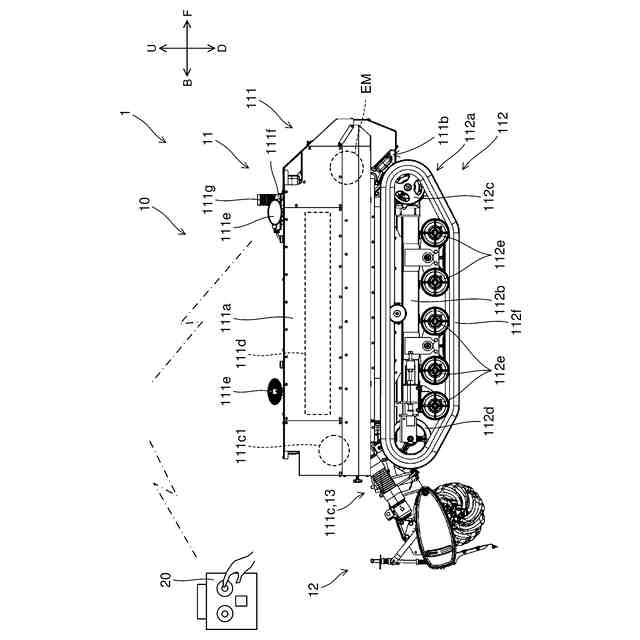
本発明の実施の一形態に係る作業車両の概略の構成を示す図である。
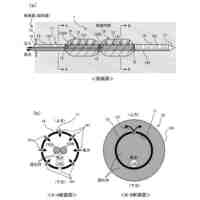
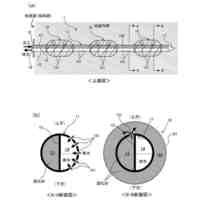
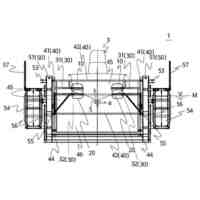
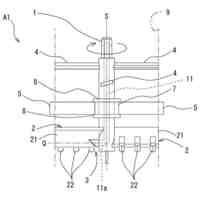
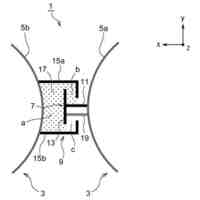
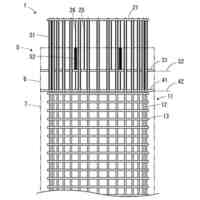
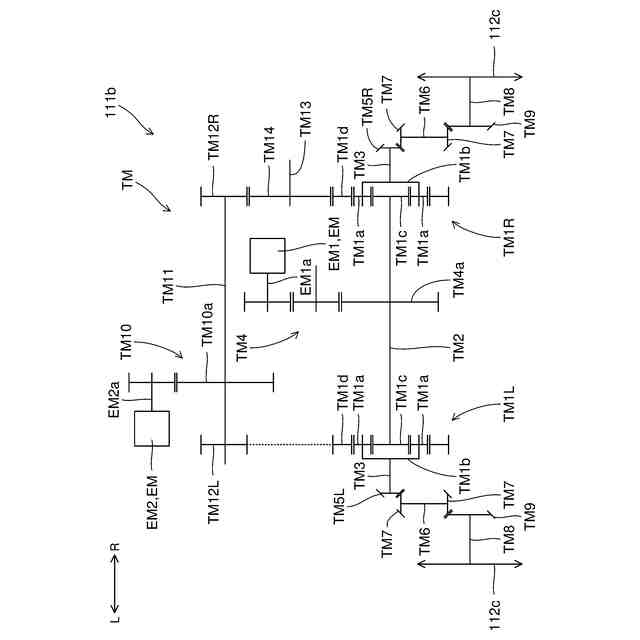
上記作業車両に備わる走行駆動装置の構成を模式的に示す模式図である。
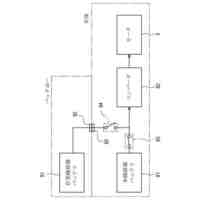
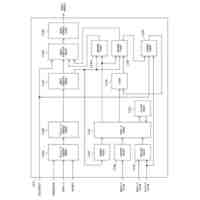
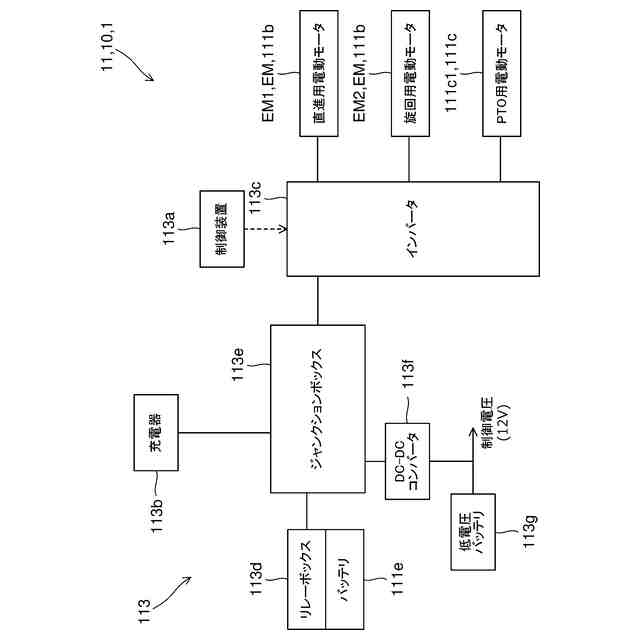
上記作業車両の電気系の構成を模式的に示すブロック図である。
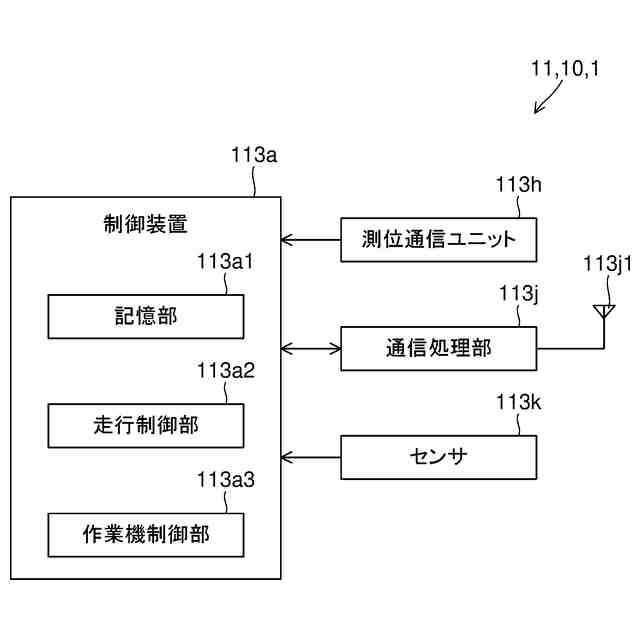
上記作業車両の制御系の構成を模式的に示すブロック図である。
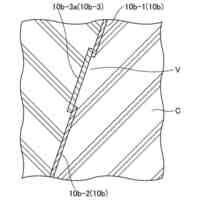
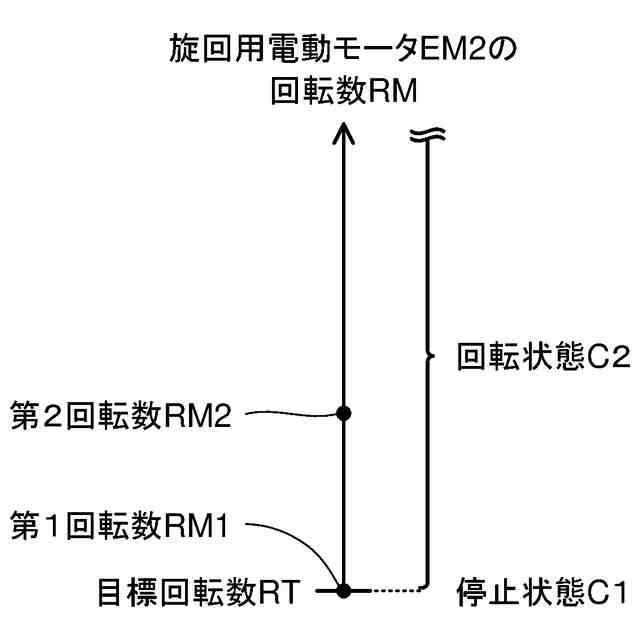
上記走行駆動装置の旋回用電動モータの状態を説明する説明図である。
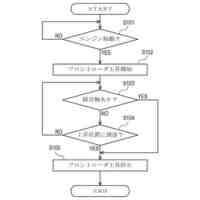
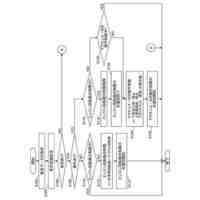
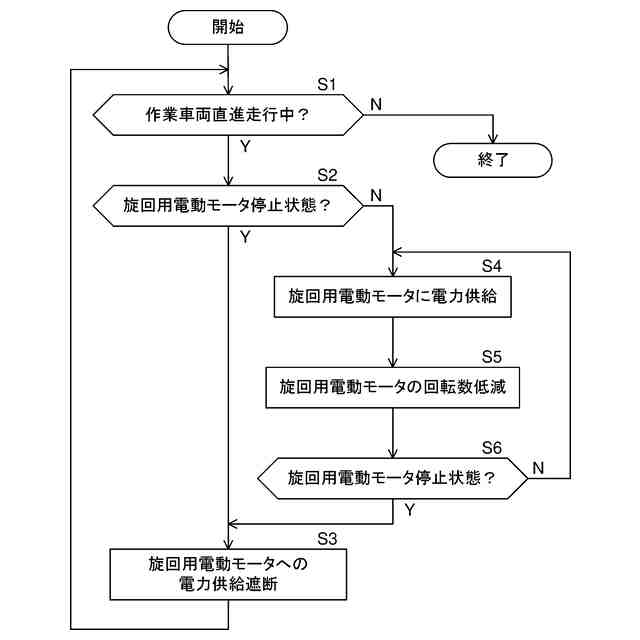
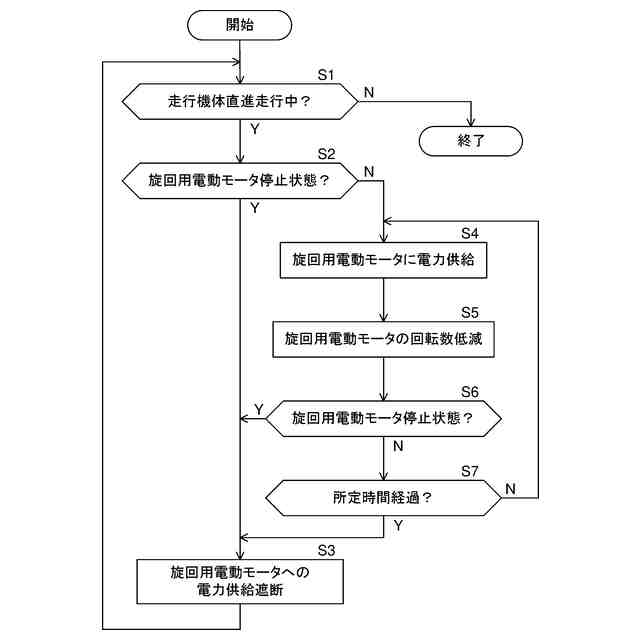
上記作業車両の直進走行時における上記旋回用電動モータに関わる制御の流れを示すフローチャートである。
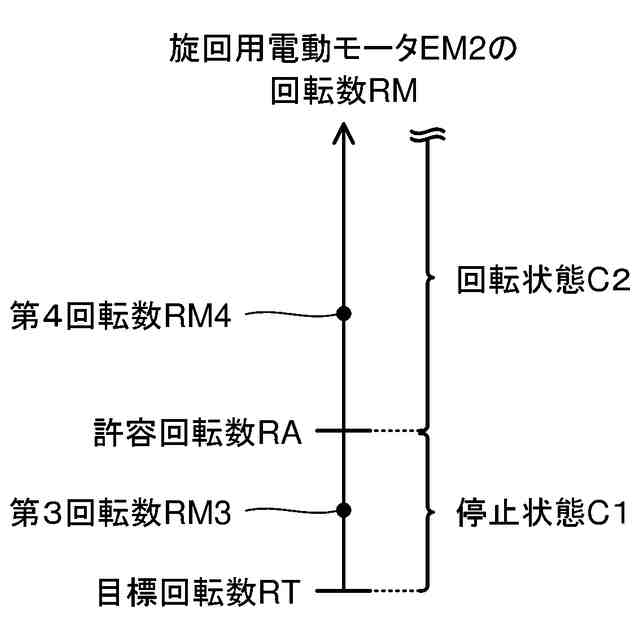
上記旋回用電動モータの状態の変形例を説明する説明図である。
上記作業車両の直進走行時における上記旋回用電動モータに関わる制御の変形例の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明の実施の形態について、図面に基づいて説明すれば、以下の通りである。
【0010】
〔1.作業車両の概略構成〕
図1は、本発明の実施の一形態に係る作業車両1の概略の構成を示す図である。作業車両1は、例えば農作業、建設作業等の作業を行うために利用される。作業車両1は、車両本体10と、車両本体10とは別体で設けられる遠隔操作装置20と、を備える。車両本体10は、地面を走行する走行機体11と、走行機体11に連結される作業機12と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
鋼管
13日前
FKS株式会社
擁壁
2日前
株式会社クボタ
作業車
今日
株式会社奥村組
ケーソン工法
5日前
株式会社クボタ
作業車
今日
株式会社武井工業所
積みブロック
22日前
株式会社奥村組
ケーソン刃口金物
5日前
株式会社熊谷組
密度計測方法
今日
株式会社大林組
袋体付き排水パイプ
12日前
株式会社大林組
袋体付き排水パイプ
12日前
大和ハウス工業株式会社
杭抜き先端具
6日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
20日前
ヤマト発動機株式会社
浮遊型消波装置
2日前
ゼニヤ海洋サービス株式会社
通船ゲート
12日前
鹿島建設株式会社
接続方法および接続構造
12日前
株式会社フジタ
掘削機
21日前
有限会社 櫂設計事務所
掘削・撹拌具
28日前
JFEスチール株式会社
鋼管矢板の継手構造
14日前
株式会社フジタ
建築物とその施工方法
12日前
JFEスチール株式会社
鋼管矢板の継手構造
14日前
JFEスチール株式会社
鋼管矢板の継手構造
2日前
株式会社大林組
建物の構築方法及び建物
12日前
株式会社武井工業所
積みブロック用基礎ブロック
22日前
株式会社熊谷組
杭頭処理構造、杭頭処理方法
2日前
株式会社小松製作所
作業機械
22日前
鹿島建設株式会社
柱建て込み方法
6日前
日立建機株式会社
作業機械
6日前
株式会社トラバース
地盤改良ユニット及び地盤改良機
21日前
日立建機株式会社
作業機械
12日前
日本コンクリート工業株式会社
堤防の補強構造
12日前
住友建機株式会社
作業機械、操作支援システム
6日前
株式会社フジタ
情報取得システム
2日前
住友重機械工業株式会社
作業機械用のシステム
6日前
日立建機株式会社
建設機械
2日前
JFEスチール株式会社
モノパイル
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ