TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135836
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033841
出願日
2024-03-06
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
3/43 20060101AFI20250911BHJP(水工;基礎;土砂の移送)
要約
【課題】自動掘削放土制御において掘削作業や放土作業の様々な種類の異変の発生を早い段階で検出可能な作業機械を提供する。
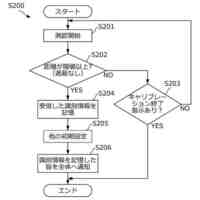
【解決手段】地形変化監視領域の内部において、自動動作開始前に予定されている地形の変化位置、土量の変化量と、自動動作前後の実際の地形の変化位置、土量の変化量とから、作業(タスク)の異変発生を判定し、作業(タスク)の異変が発生したと判定した場合は、外部システムに異変発生を通知し、作業機械の自動動作を停止する。
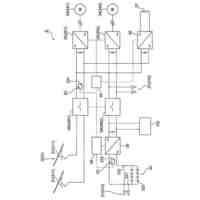
【選択図】図3
特許請求の範囲
【請求項1】
タスク情報に基づいて作業装置の動作軌道を計画し、計画した前記動作軌道に基づいて前記作業装置の動作を制御し、掘削放土作業を自動で実行する作業機械であって、
掘削作業を行う掘削領域または放土作業を行う放土領域の少なくとも一方の情報を含む前記タスク情報が入力される入力部と、
前記作業機械の周囲の現況地形を取得する現況地形取得部と、
前記タスク情報に基づいて、前記作業装置の動作軌道を計画する動作計画部と、
前記動作軌道に基づいて前記作業装置の動作を制御する自動動作制御部と、
前記現況地形取得部により、前記作業機械が掘削放土作業を実行する前の前記現況地形である動作前地形と、前記作業機械が前記掘削放土作業を実行した後の前記現況地形である動作後地形を取得し、前記動作前地形と前記タスク情報または前記動作軌道から演算される推定地形変化情報と、前記動作前地形と前記動作後地形から演算される実地形変化情報とに基づいて、前記作業機械が実行した前記掘削放土作業に異変が発生したか否かを判定し、前記掘削放土作業に異変が発生したと判定した場合は異変発生を外部システムに通知する異変発生判定部と、を有する制御装置を備えることを特徴とする作業機械。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の作業機械において、
前記推定地形変化情報および前記実地形変化情報は、所定の領域における土砂の体積の変化量を含み、
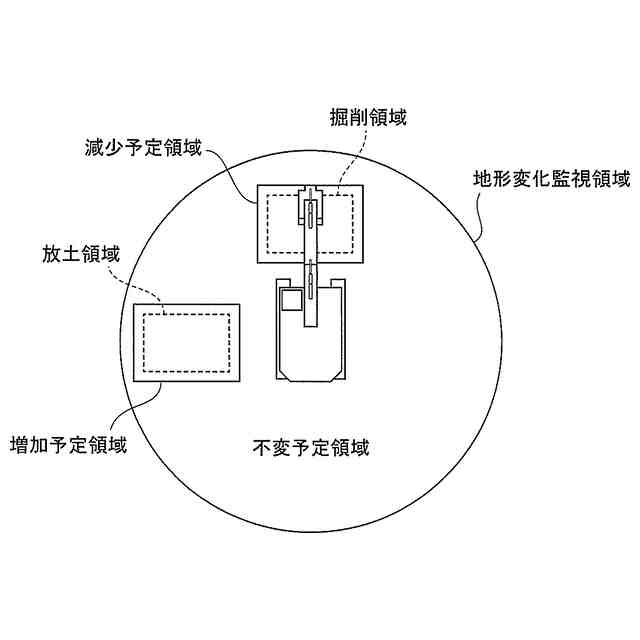
前記制御装置は、前記掘削領域または前記放土領域の少なくとも一方の情報から、土砂の体積が減少する予定である減少予定領域と土砂の体積が増加する予定である増加予定領域と土砂の体積が変化しない予定である不変予定領域のうちの少なくとも1つの領域を含む地形変化監視領域を設定する監視領域設定部をさらに備え、
前記異変発生判定部は、前記地形変化監視領域内の各領域における前記推定地形変化情報に含まれる土砂の体積の変化量と前記実地形変化情報に含まれる土砂の体積の変化量から、前記掘削放土作業に異変が発生したか否かを判定することを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
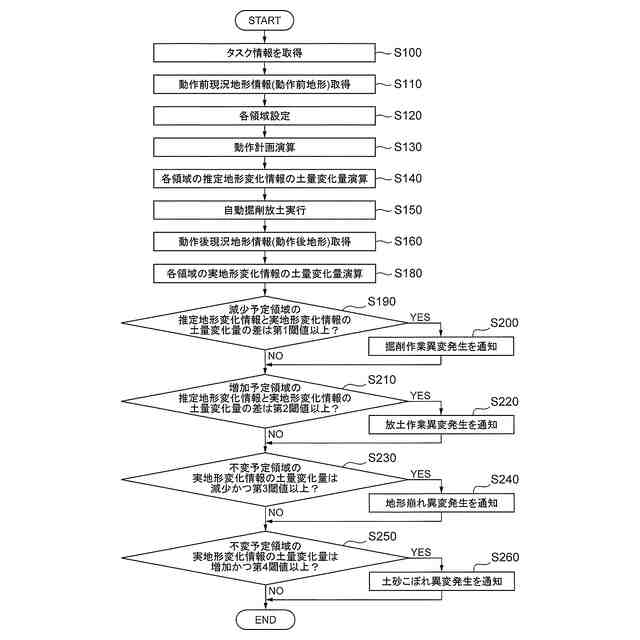
前記異変発生判定部は、前記減少予定領域における前記推定地形変化情報に含まれる土砂の体積の変化量と前記実地形変化情報に含まれる土砂の体積の変化量から、前記掘削放土作業のうち掘削作業に異変が発生したか否かを判定することを特徴とする作業機械。
【請求項4】
請求項2に記載の作業機械において、
前記異変発生判定部は、前記増加予定領域における前記推定地形変化情報に含まれる土砂の体積の変化量と前記実地形変化情報に含まれる土砂の体積の変化量から、前記掘削放土作業のうち放土作業に異変が発生した否かを判定することを特徴とする作業機械。
【請求項5】
請求項2に記載の作業機械において、
前記異変発生判定部は、前記不変予定領域における前記実地形変化情報に含まれる土砂の体積の変化が減少である場合、その減少量から、地形崩れの異変が発生したか否かを判定し、前記不変予定領域における前記実地形変化情報に含まれる土砂の体積の変化が増加である場合、その増加量から、土砂こぼれの異変が発生したか否かを判定することを特徴とする作業機械。
【請求項6】
請求項2に記載の作業機械において、
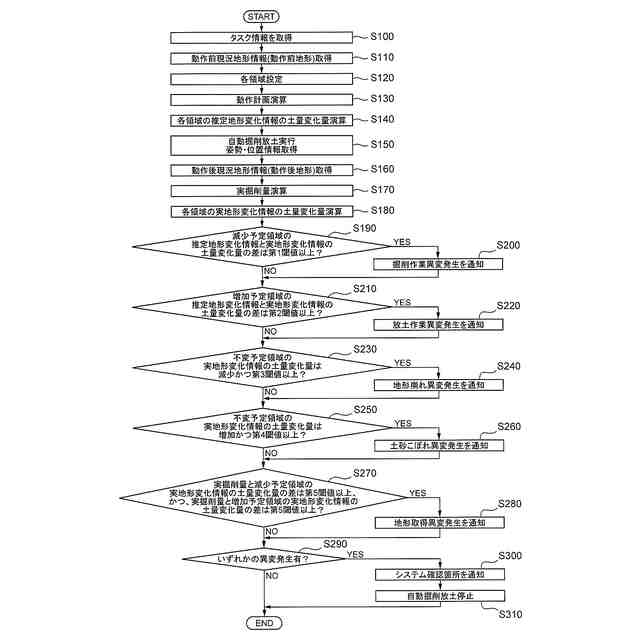
前記制御装置は、前記作業機械が掘削した土砂の体積を演算する実掘削量推定部をさらに備え、
前記異変発生判定部は、前記減少予定領域における前記推定地形変化情報に含まれる土砂の体積の変化量と、前記増加予定領域における前記推定地形変化情報に含まれる土砂の体積の変化量と、前記実掘削量推定部において演算された前記作業機械が掘削した土砂の体積から、現況地形取得に異変が発生したか否かを判定することを特徴とする作業機械。
【請求項7】
請求項2に記載の作業機械において、
前記監視領域設定部において、前記減少予定領域は、前記掘削領域全体を含むように設定され、前記増加予定領域は、前記放土領域全体を含むように設定され、前記地形変化監視領域は、前記減少予定領域全体及び前記増加予定領域全体を含むように設定され、前記不変予定領域は、前記地形変化監視領域から前記減少予定領域と前記増加予定領域を除いた領域として設定されることを特徴とする作業機械。
【請求項8】
請求項2に記載の作業機械において、
前記異変発生判定部において、前記掘削放土作業に異変が発生したと判定された場合には、前記自動動作制御部は、前記作業機械の動作を停止することを特徴とする作業機械。
【請求項9】
請求項5に記載の作業機械において、
前記異変発生判定部は、土砂こぼれの異変が発生したと判定した場合に、前記土砂こぼれの位置を特定し、前記土砂こぼれの位置を含む掘削領域の情報を前記タスク情報として前記動作計画部に対して出力することを特徴とする作業機械。
【請求項10】
請求項5に記載の作業機械において、
前記タスク情報には、均し作業を行う均し領域の情報が含まれ、
前記異変発生判定部は、土砂こぼれの異変が発生したと判定した場合に、前記土砂こぼれの位置を特定し、前記土砂こぼれの位置を含む均し領域の情報を前記タスク情報として前記動作計画部に対して出力することを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば自動で掘削放土作業を行う作業機械に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
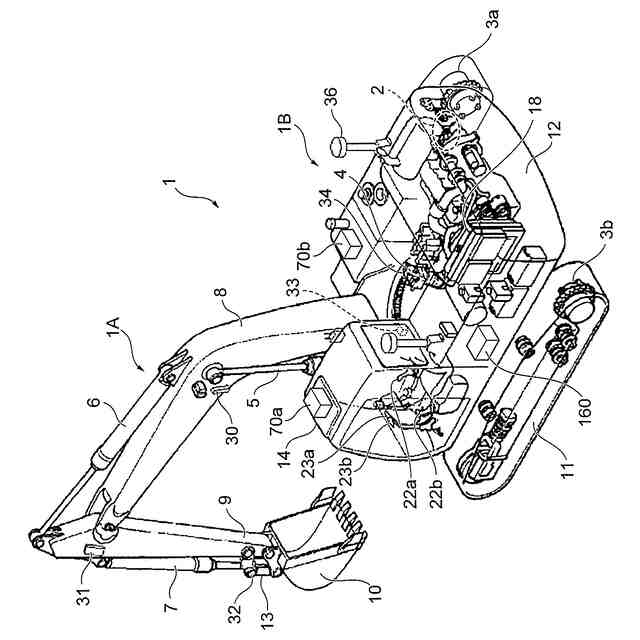
作業機械である油圧ショベルが用いられる作業として、作業装置に備えられたバケットによって土砂を掘削し、運搬車両(例えばダンプトラック)の荷台に掘削した土砂を放土する掘削放土作業がある。
【0003】
このような掘削放土作業を自動制御で行うための研究が行われている。自動制御による掘削放土作業(自動掘削放土作業)中に、バケットから土砂がこぼれて目標とする放土場所以外の場所に落下したり、掘削した穴や溝の周囲の土砂が崩れたりといった異変が発生した場合、そのまま作業を継続してしまうと、作業完了までに予定を大きく超える時間を要してしまったり、人手によって土砂の移動を行う必要が生じたりする場合があり、作業効率が低下してしまう恐れがある。
【0004】
特許第7076020号公報(特許文献1)には、異常物体が検知されたとき、動作計画の実施が阻害されるか否かを判定する技術が開示されている。この特許文献1では、作業計画中の作業順序に沿って作業内容を選択し、動作計画を作成する。異常物体が検知されたとき、異常物体の存在によって動作計画の実施が阻害されるか否かを判定し、阻害されると判定した場合に、阻害される作業を異常物体を含む範囲と含まない範囲に分割可能か否かを更に判定し、分割可能と判定した場合、異常物体を含まない範囲の動作計画を作成している。
【0005】
特許第6424238号公報(特許文献2)には、作業進捗または終了予定時間を用いて自動制御から遠隔操作に切替える作業機械を決定する技術が開示されている。この特許文献2では、複数の作業機械毎の作業進捗と作業の終了予定時間を演算し、複数の作業機械の間でそれぞれの作業進捗または終了予定時間を比較し、比較結果に基づいて選ばれた作業機械を自動制御から遠隔操作に切替えている。
【先行技術文献】
【特許文献】
【0006】
特許第7076020号公報
特許第6424238号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載の技術を用いて異常物体が検出された場合の作業効率の低下を防止することは可能である。しかし、特許文献1に記載の技術では、作業の効率を低下させる異変の発生判定が異常物体検出時に限定されてしまう。また、特許文献2に記載の技術を用いて作業の進捗状態が思わしくない作業機械を遠隔操作で補助することで作業効率の低下を防止することは可能である。しかし、特許文献2に記載の技術では、ある程度作業が進まないと正常時と異変発生時で作業の進捗状態に差がつかないため、異変の発生を検出するまでに時間がかかってしまう。さらに、いずれの技術においても、バケットから土砂がこぼれて目標とする放土場所以外の場所に落下したり、掘削した穴や溝の周囲の土砂が崩れたりといった異変は考慮できていないため、そのような異変が発生した場合、自動掘削放土作業終了後に人手によって土砂の移動を行う必要が生じ、作業効率が低下する可能性がある。そのため、自動掘削放土作業においては、様々な種類の異変の発生を早い段階で検出できることが望ましい。
【0008】
本発明は、上記課題を解決することを目的としてなされたものであり、自動掘削放土作業における異変の発生と異変の種類を早い段階で検出して作業効率の低下を防止することができる作業機械を提供することを目的とする。
【課題を解決するための手段】
【0009】
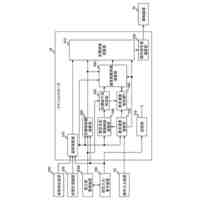
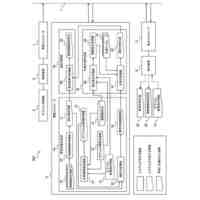
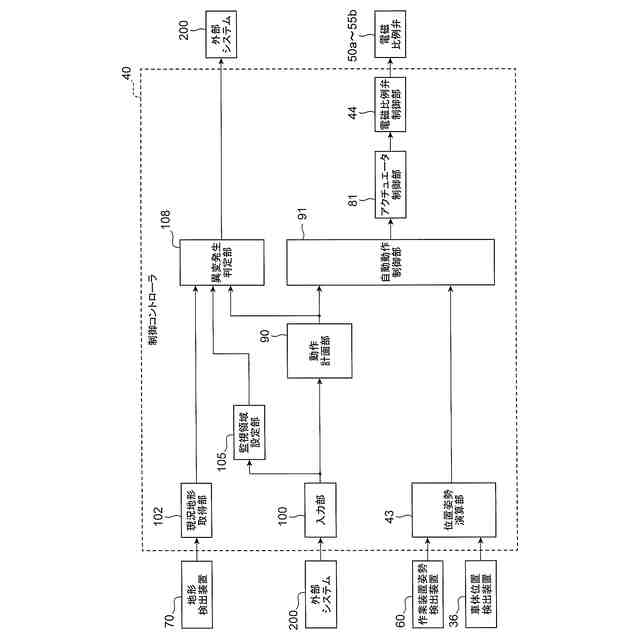
上記課題を解決するために、本発明に係る作業機械は、タスク情報に基づいて作業装置の動作軌道を計画し、計画した前記動作軌道に基づいて前記作業装置の動作を制御し、掘削放土作業を自動で実行する作業機械であって、掘削作業を行う掘削領域または放土作業を行う放土領域の少なくとも一方の情報を含む前記タスク情報が入力される入力部と、前記作業機械の周囲の現況地形を取得する現況地形取得部と、前記タスク情報に基づいて、前記作業装置の動作軌道を計画する動作計画部と、前記動作軌道に基づいて前記作業装置の動作を制御する自動動作制御部と、前記現況地形取得部により、前記作業機械が掘削放土作業を実行する前の前記現況地形である動作前地形と、前記作業機械が前記掘削放土作業を実行した後の前記現況地形である動作後地形を取得し、前記動作前地形と前記タスク情報または前記動作軌道から演算される推定地形変化情報と、前記動作前地形と前記動作後地形から演算される実地形変化情報とに基づいて、前記作業機械が実行した前記掘削放土作業に異変が発生したか否かを判定し、前記掘削放土作業に異変が発生したと判定した場合は異変発生を外部システムに通知する異変発生判定部と、を有する制御装置を備えることを特徴とする作業機械である。
【発明の効果】
【0010】
本発明によれば、自動掘削放土作業における異変の発生と異変の種類を早い段階で検出して通知することにより、作業効率の低下を防止することができる作業機械を提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
建設機械
2か月前
日立建機株式会社
建設機械
2か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
3日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
電子機器装置
2か月前
日立建機株式会社
情報処理装置
1か月前
日立建機株式会社
電動式作業機械
2か月前
日立建機株式会社
ダンプトラック
2か月前
日立建機株式会社
電動式建設機械
2か月前
日立建機株式会社
充電支援システム
1か月前
日立建機株式会社
部品需要予測装置
1か月前
日立建機株式会社
建設機械の作業装置
9日前
日立建機株式会社
建設機械の下部走行体
2日前
日立建機株式会社
制御弁装置および作業機械
1か月前
日立建機株式会社
作業機械の位置推定システム
9日前
日立建機株式会社
カウンタウエイト及び作業機械
1か月前
日本信号株式会社
光検知システム
1か月前
日立建機株式会社
木材チップ搬出装置及び木材チップ詰め込み機
18日前
日立建機株式会社
オプション用機器着脱支援システムおよび作業機械
2か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
電動式建設機械
1か月前
日立建機株式会社
ダンプトラックおよび給電システム
1か月前
日立建機株式会社
周囲監視システム、および、それを備える作業機械
11日前
個人
大都市防災設備
1か月前
個人
鋼管
10日前
株式会社奥村組
ケーソン工法
2日前
株式会社武井工業所
積みブロック
19日前
株式会社奥村組
ケーソン刃口金物
2日前
個人
水底地盤の天地返し工法と専用作業船
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ