TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139608
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024038532
出願日
2024-03-13
発明の名称
情報取得システム
出願人
株式会社フジタ
代理人
インフォート弁理士法人
主分類
E02F
9/24 20060101AFI20250919BHJP(水工;基礎;土砂の移送)
要約
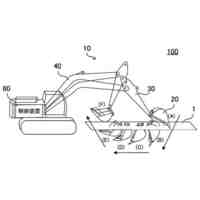
【課題】建設機械の上方の任意位置から観測対象の情報を効率よく取得する。
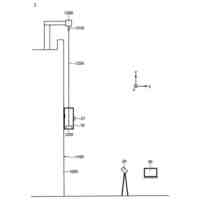
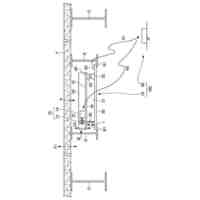
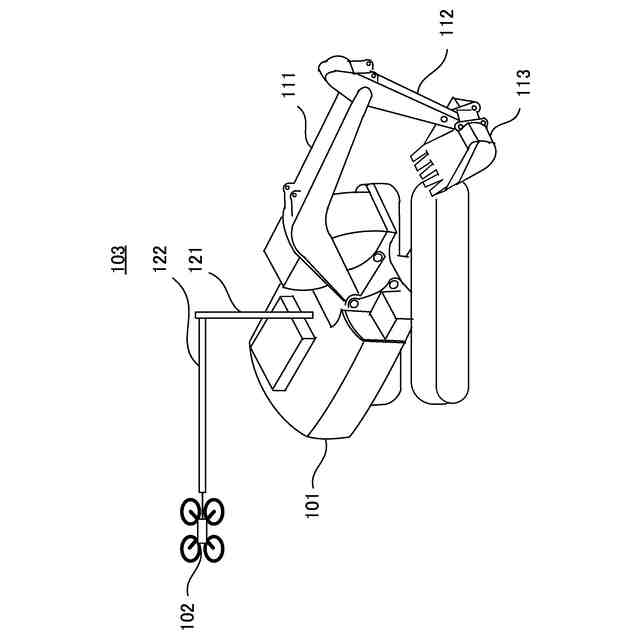
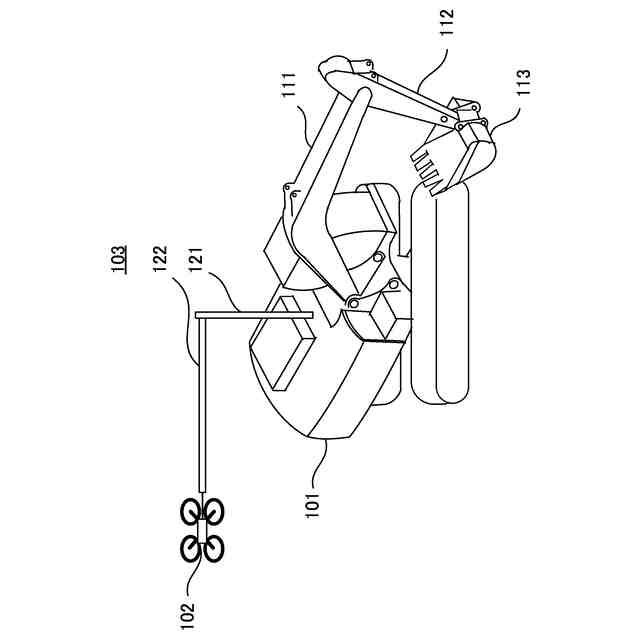
【解決手段】情報取得システムは、垂直保持部及び水平保持部を有する。垂直保持部は、観測対象の情報を取得する航空機の位置を、航空機に有線で接続された建設機械よりも高い位置に保持する。水平保持部は、観測対象の情報を取得するために垂直保持部と接続される。観測対象の情報は、建設機械の上方から取得される。
【選択図】図1
特許請求の範囲
【請求項1】
観測対象の情報を取得する航空機の位置を、前記航空機に有線で接続された建設機械よりも高い位置に保持する垂直保持部と、
前記観測対象の情報を取得するために前記垂直保持部と接続される水平保持部と、
を有し、
前記観測対象の情報は、前記建設機械の上方から取得されることを特徴とする情報取得システム。
続きを表示(約 740 文字)
【請求項2】
前記垂直保持部は、前記建設機械が有する可動部よりも高い位置に前記航空機を保持することを特徴とする請求項1に記載の情報取得システム。
【請求項3】
前記水平保持部は、指定した場所の前記観測対象の情報が取得可能なように設けられることを特徴とする請求項2に記載の情報取得システム。
【請求項4】
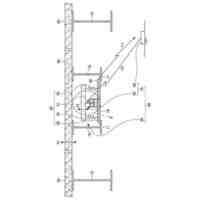
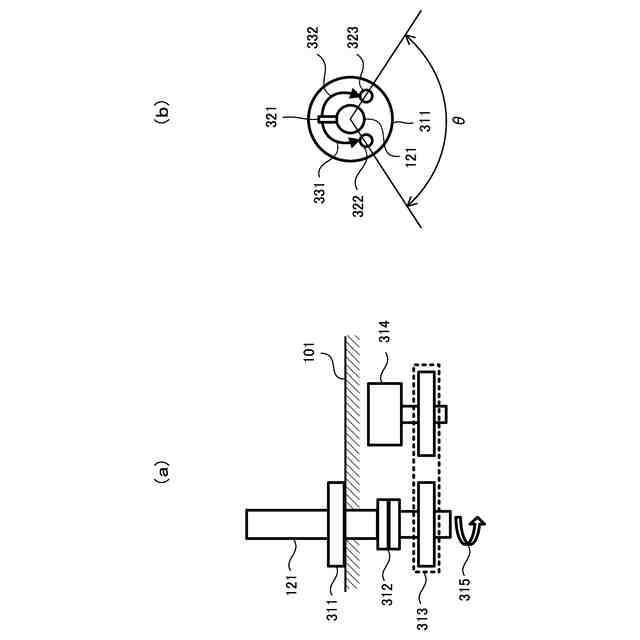
前記垂直保持部は、着脱可能な接続部を有し、
前記接続部は、前記建設機械の上部に装着され、前記建設機械の上部で回転可能な回転部材を含むことを特徴とする請求項3記載の情報取得システム。
【請求項5】
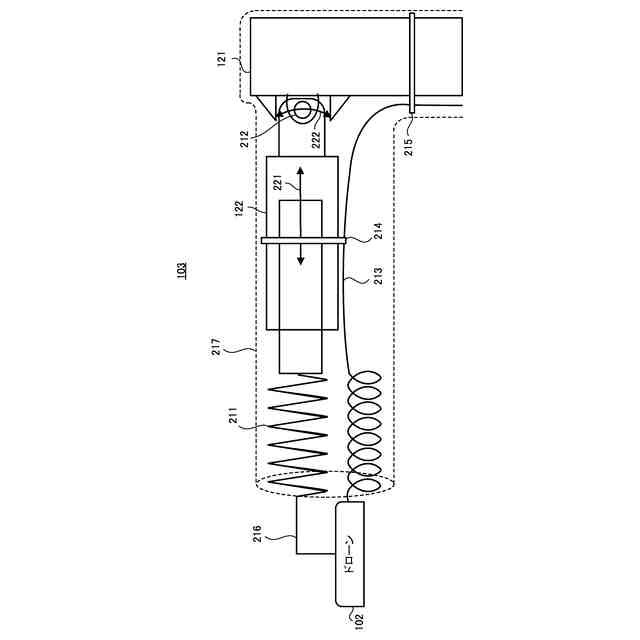
前記水平保持部は、伸縮機能を備え、
前記伸縮機能は、前記航空機の飛行動作に応じて伸縮可能な伸縮部材により実現されることを特徴とする請求項4に記載の情報取得システム。
【請求項6】
前記伸縮部材は、前記垂直保持部から前記航空機へ向かう方向に伸縮することを特徴とする請求項5に記載の情報取得システム。
【請求項7】
前記水平保持部は、前記垂直保持部と前記水平保持部との接続箇所において、上方又は下方に所定の角度だけ傾動可能であることを特徴とする請求項1乃至6の何れか1項に記載の情報取得システム。
【請求項8】
観測対象の情報を取得する航空機の位置を、前記航空機に有線で接続された建設機械よりも高い位置に保持する垂直保持部と、
前記観測対象の情報を取得するために前記垂直保持部と接続される水平保持部と、
を有し、
前記航空機の起動時に、前記航空機が備える機体位置装置を使用して水平になるように制御することを特徴とする情報取得システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報取得システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
工事現場において、バックホウ等の建設機械を工事現場から離れた場所から遠隔操作により操縦することで、掘削作業が進められることがある。この場合、バックホウの前方の地面を撮影するために、運転席の天井等にカメラが取り付けられ、オペレータは、撮影された映像を見ながらバックホウの遠隔操作を行う。工事現場で使用される建設機械は、重機と呼ばれることもある。
【0003】
バックホウの遠隔操作に関して、移動機器の周囲状況を視覚的に把握するための画像データを提示する周囲状況提示システムが知られている(例えば、特許文献1を参照)。バケット内からバケット外に及ぶ土砂山を測定して効率的な掘削作業を実現できるショベルも知られている(例えば、特許文献2を参照)。
【先行技術文献】
【特許文献】
【0004】
特開2016-181119号公報
特開2017-172316号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動化が進められている建設機械においても、全作業を自動化することは難しく、遠隔操作も併用される。この場合、基本的にはカメラからの映像を見ながら遠隔操作が行われるが、映像の内容が施工効率に大きく影響する。
【0006】
一例として、建設機械がバックホウの場合について説明する。遠隔操作においては、運転席の天井等にカメラを取り付けて撮影した画像を伝送して用いるが、建設機械に搭乗して操作する場合よりも視野が狭くなるため、掘削作業においては、作業対象との遠近感を把握することが難しい。走行操作においては、適切な走路選択と安全性確保を容易にするような、バックホウの車体を含む広い視野の走行前景(俯瞰画像)を取得することが難しい。
【0007】
このように、建設機械に取り付けられた従来のカメラの映像は、効率的な遠隔操作の弊害となっている。そこで、無人化施工の工事現場では、カメラを搭載した遠隔操作式移動カメラ車を建設機械の側方に設置して、遠近感や視野を補完する映像を提供することにより、作業効率を上げようとしている。しかし、遠隔操作式移動カメラ車を準備するには調達や運用にコストがかかる。
【0008】
カメラを搭載した一般的な充電式ドローンを利用して作業に有用な画像を取得する方法も考えられるが、ドローンの連続飛行時間は限られているため、工事現場のニーズに必ずしも適合しない。そこで、特許文献1の周囲状況提示システムでは、バックホウと電源ケーブルで接続された有線給電ドローンが用いられている。
【0009】
有線給電ドローンを用いた場合、バックホウのブーム、アーム、及びバケット等の高速で動作する部分と、飛行する有線給電ドローンとの干渉を防止することが難しく、衝突する事例が報告されている。給電用電源ケーブルの適切な張力の維持も難しく、給電用電源ケーブルが垂れ下がったり引っ張られすぎたりして、飛行を妨害することがある。それらを防止するために高度な制御装置の導入が試みられているが、コストに見合った結果は得られていない。
【0010】
建設機械の自動作業では、建設機械周辺の地盤(土砂)の形状を計測装置により計測することで、走行地盤及び掘削地盤の形状を把握することも重要である。建設機械がバックホウの場合、運転席上方に設置した計測装置により取得した地盤形状により、制御装置がバケット爪先の適切な掘削パス(掘削経路)を生成し、掘削パスに基づき地盤の掘削動作が行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社フジタ
掘削機
20日前
株式会社フジタ
合成床
11日前
株式会社フジタ
制振装置
11日前
株式会社フジタ
制振装置
11日前
株式会社フジタ
水処理装置
1日前
株式会社フジタ
木質建築部材
1日前
株式会社フジタ
柱梁接合構造
1か月前
株式会社フジタ
昇降システム
1か月前
株式会社フジタ
昇降システム
1か月前
株式会社フジタ
昇降システム
21日前
株式会社フジタ
状態評価システム
21日前
株式会社フジタ
情報提供システム
2か月前
株式会社フジタ
情報取得システム
1日前
株式会社フジタ
エネルギーシステム
11日前
株式会社フジタ
コンクリート構造物
12日前
株式会社フジタ
建築物とその施工方法
1か月前
株式会社フジタ
建築物とその施工方法
11日前
株式会社フジタ
木質梁と床の取合構造
12日前
株式会社フジタ
環境音快音化システム
1か月前
株式会社フジタ
エネルギー制御システム
11日前
株式会社フジタ
柱梁接合構造とその施工方法
1か月前
株式会社フジタ
二酸化炭素分離回収供給装置
20日前
株式会社フジタ
柱梁接合構造とその施工方法
1か月前
株式会社フジタ
二酸化炭素分離回収供給装置
20日前
株式会社フジタ
床衝撃音レベル予測システム
1日前
株式会社フジタ
荷重計測装置および昇降システム
1か月前
株式会社フジタ
合成床、及び合成床と梁の接合構造
4日前
大和ハウス工業株式会社
制振装置
11日前
大和ハウス工業株式会社
制振装置
11日前
株式会社明電舎
電力系統システム
1日前
株式会社フジタ
空調支援ダクト、及び、空調システム
11日前
株式会社フジタ
被覆シートおよび二酸化炭素供給方法
20日前
株式会社フジタ
状態評価装置および状態評価システム
21日前
株式会社フジタ
移動体制御システム及び移動体制御方法
13日前
株式会社フジタ
振動発生源報知装置および振動発生源報知方法
28日前
株式会社フジタ
二酸化炭素吸着装置及び二酸化炭素の吸着方法
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ