TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142618
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042070
出願日
2024-03-18
発明の名称
パレット検知装置
出願人
株式会社豊田自動織機
,
株式会社豊田中央研究所
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250924BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】コスト及び手間を抑えつつ、パレットの位置を精度良く検知することができるパレット検知装置を提供する。
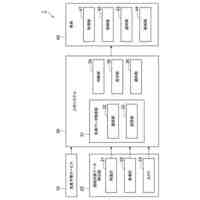
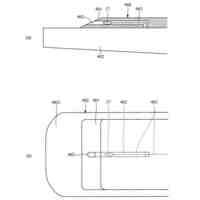
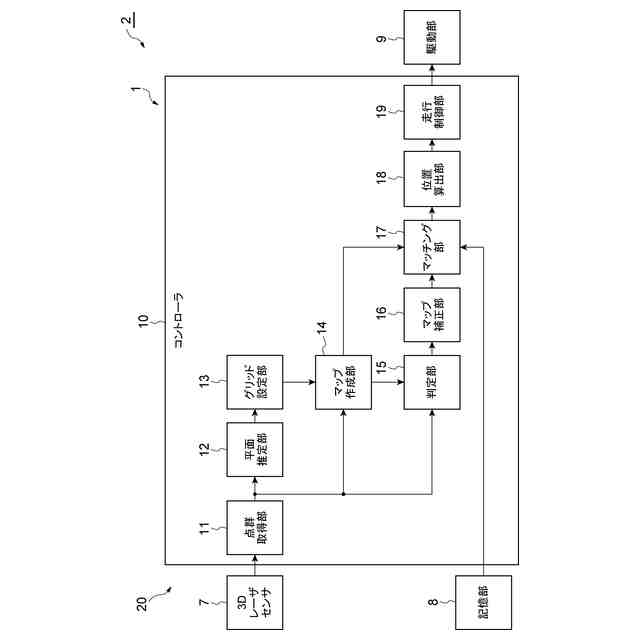
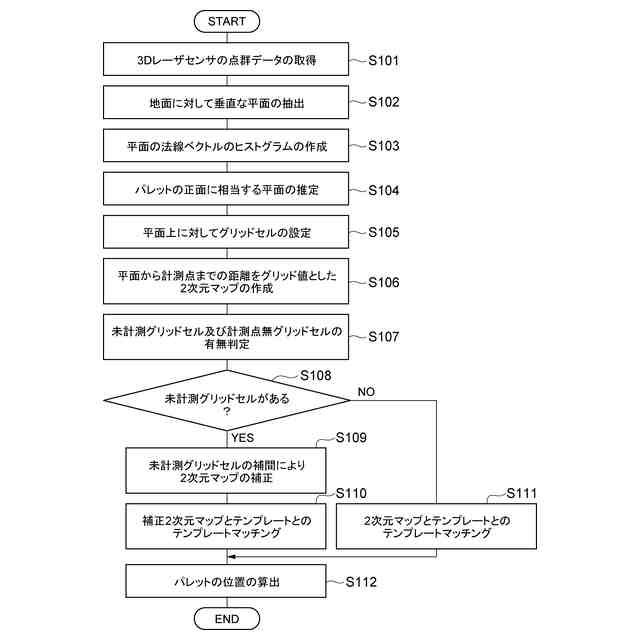
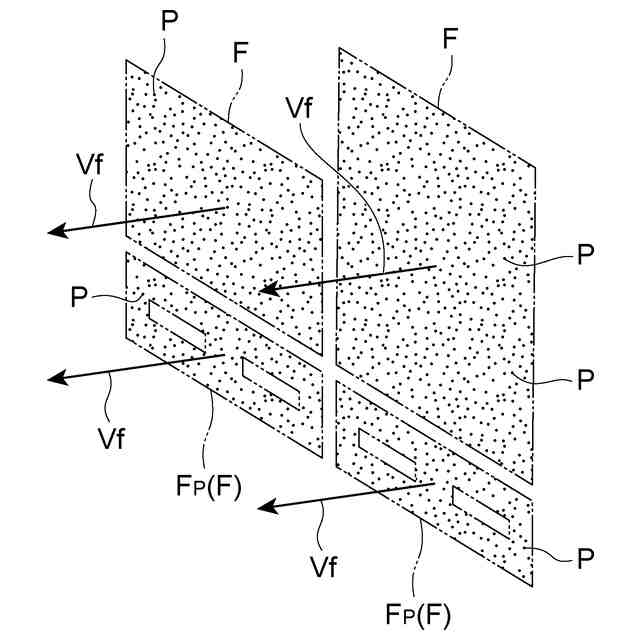
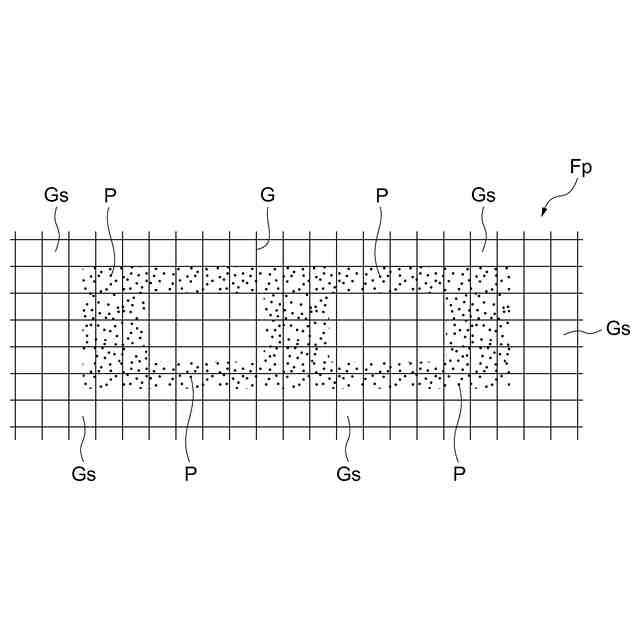
【解決手段】パレット検知装置20は、複数の計測点を含む3次元の点群データを取得する取得部と、点群データに基づいて推定された平面Fp上にグリッドGを作成することで、平面Fp上に対して複数のグリッドセルGsを設定するグリッド設定部13と、複数のグリッドセルGsについて、平面Fpから計測点までの距離をグリッド値として算出した2次元マップを作成するマップ作成部14と、2次元マップに基づいて計測点のデータ抜けが発生した未計測グリッドセルGs1があるかどうかを判定する判定部15と、未計測グリッドセルGs1があると判定されたときに、未計測グリッドセルGs1のクリッド値を補間することで、2次元マップを補正するマップ補正部16と、2次元マップに基づいてパレット5の位置を決定する位置決定部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
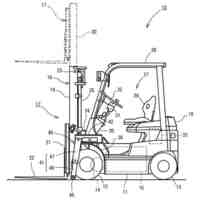
フォークリフトにより荷役を行う際にパレットを検知するパレット検知装置であって、
前記フォークリフトから前記パレットまでの距離を計測するセンサを有し、複数の計測点を含む3次元の点群データを取得する取得部と、
前記取得部により取得された前記3次元の点群データに基づいて、前記パレットの正面に相当する平面を推定する平面推定部と、
前記平面推定部により推定された平面上にグリッドを作成することで、前記平面上に対して複数のグリッドセルを設定するグリッド設定部と、
前記グリッド設定部により設定された前記複数のグリッドセルについて、前記平面推定部により推定された平面から前記取得部により取得された計測点までの距離をグリッド値として算出した2次元マップを作成するマップ作成部と、
前記マップ作成部により作成された2次元マップに基づいて、前記複数のグリッドセルのうち前記取得部により前記点群データが取得されずに前記計測点のデータ抜けが発生した未計測グリッドセルがあるかどうかを判定する判定部と、
前記判定部により前記未計測グリッドセルがあると判定されたときに、前記未計測グリッドセルのクリッド値を補間することで、前記マップ作成部により作成された2次元マップを補正するマップ補正部と、
前記マップ作成部により作成された2次元マップまたは前記マップ補正部により補正された2次元マップに基づいて、前記パレットの位置を決定する位置決定部とを備えるパレット検知装置。
続きを表示(約 1,000 文字)
【請求項2】
前記パレットの寸法を含むパレット情報に応じたテンプレートを記憶する記憶部を更に備え、
前記位置決定部は、前記マップ作成部により作成された2次元マップまたは前記マップ補正部により補正された2次元マップと前記記憶部に記憶されたテンプレートとをマッチングさせて、前記パレットの位置を決定する請求項1記載のパレット検知装置。
【請求項3】
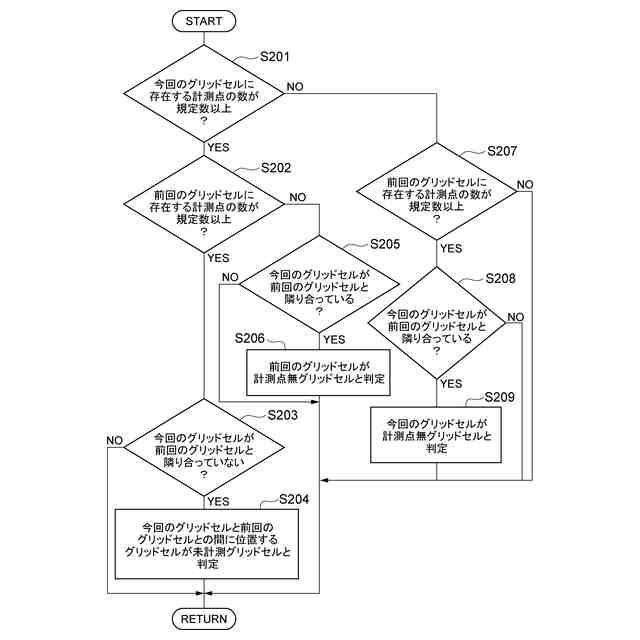
前記判定部は、前記マップ作成部により作成された2次元マップに基づいて、前記未計測グリッドセルと、前記取得部により前記点群データが取得されたが前記計測点が存在しない計測点無グリッドセルとがあるかどうかを判定し、
前記マップ補正部は、前記判定部により前記未計測グリッドセルがあると判定されたときは、前記未計測グリッドセルのグリッド値を補間することで、前記マップ作成部により作成された2次元マップを補正し、前記判定部により前記計測点無グリッドセルがあると判定されたときは、前記計測点無グリッドセルのグリッド値を補間しない請求項1記載のパレット検知装置。
【請求項4】
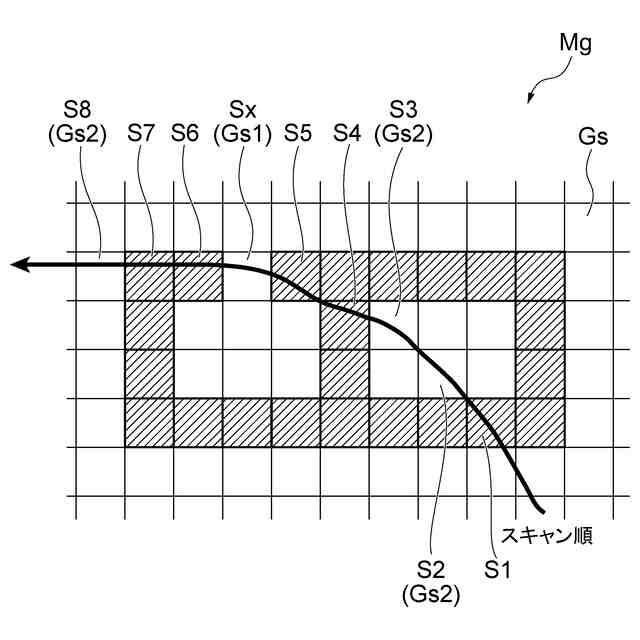
前記判定部は、前記マップ作成部により作成された2次元マップに基づいて、前記センサのスキャン順に従って前記未計測グリッドセルがあるかどうかを判定し、
前記マップ補正部は、前記判定部により前記未計測グリッドセルがあると判定されたときに、前記未計測グリッドセルに対して前記センサのスキャン順の上流側及び下流側に隣り合うグリッドセルのグリッド値を用いて、前記未計測グリッドセルのグリッド値を補間する請求項1記載のパレット検知装置。
【請求項5】
前記マップ補正部は、前記判定部により前記未計測グリッドセルがあると判定されたときに、前記未計測グリッドセルの周囲に配置された複数のグリッドセルのグリッド値を用いて、前記未計測グリッドセルのグリッド値を補間する請求項1記載のパレット検知装置。
【請求項6】
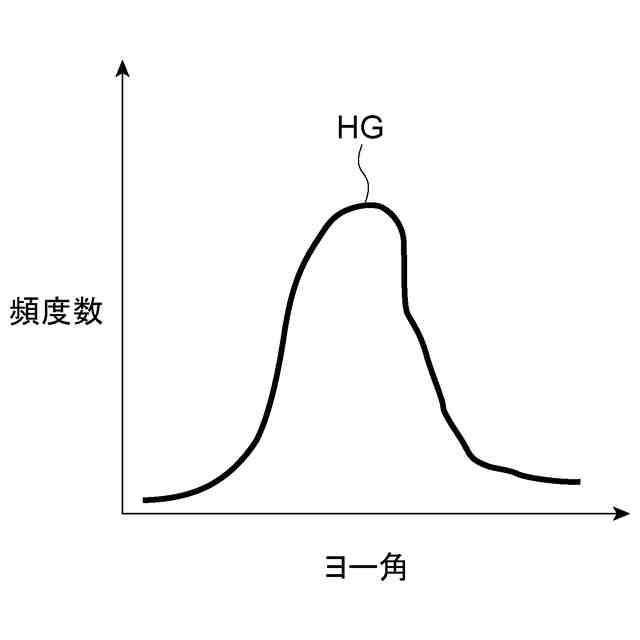
前記平面推定部は、前記3次元の点群データに基づいて、地面に対して垂直な平面の法線ベクトルのヒストグラムを作成し、前記ヒストグラムを用いて前記パレットの正面に相当する平面を推定する請求項1記載のパレット検知装置。
【請求項7】
前記センサは、前記パレットに向けてレーザを照射し、レーザの反射光を受光することにより、前記フォークリフトから前記パレットまでの距離を計測する3Dレーザセンサである請求項1記載のパレット検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パレット検知装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来のパレット検知装置としては、例えば特許文献1に記載されている技術が知られている。特許文献1に記載のパレット検知装置は、無人フォークリフトの前方を撮影する撮影装置と、対象パレットの距離測定を行う距離測定装置と、撮影装置から撮影画像を取得する画像取得部と、複数種類のパレットの画像とパレットの種類との組み合わせについての学習モデルを有し、画像取得部により取得された対象パレットの撮影画像を学習モデルに入力してパレットの種類を識別するパレット種類識別部と、距離測定装置から対象パレットの位置・形状データを取得するパレット位置・形状データ取得部と、パレット種類識別部により識別された対象パレットの種類に対応した記憶済みの位置・形状データと対象パレットの位置・形状データとを比較することにより、対象パレットの位置及び姿勢のずれ量を検出するパレットずれ量検出部とを備える。
【先行技術文献】
【特許文献】
【0003】
特開2022-179331号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術においては、画像データを取得するカメラ等の撮影装置と点群データを取得するLiDAR等の距離測定装置とをフォークリフトに搭載する必要があるため、コストが高くなる。また、パレットの種類毎の学習モデル(学習データ)が必要であり、学習データの作成に大きな手間がかかる。
【0005】
本発明の目的は、コスト及び手間を抑えつつ、パレットの位置を精度良く検知することができるパレット検知装置を提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、フォークリフトにより荷役を行う際にパレットを検知するパレット検知装置であって、フォークリフトからパレットまでの距離を計測するセンサを有し、複数の計測点を含む3次元の点群データを取得する取得部と、取得部により取得された3次元の点群データに基づいて、パレットの正面に相当する平面を推定する平面推定部と、平面推定部により推定された平面上にグリッドを作成することで、平面上に対して複数のグリッドセルを設定するグリッド設定部と、グリッド設定部により設定された複数のグリッドセルについて、平面推定部により推定された平面から取得部により取得された計測点までの距離をグリッド値として算出した2次元マップを作成するマップ作成部と、マップ作成部により作成された2次元マップに基づいて、複数のグリッドセルのうち取得部により点群データが取得されずに計測点のデータ抜けが発生した未計測グリッドセルがあるかどうかを判定する判定部と、判定部により未計測グリッドセルがあると判定されたときに、未計測グリッドセルのクリッド値を補間することで、マップ作成部により作成された2次元マップを補正するマップ補正部と、マップ作成部により作成された2次元マップまたはマップ補正部により補正された2次元マップに基づいて、パレットの位置を決定する位置決定部とを備える。
【0007】
このようなパレット検知装置においては、センサによりフォークリフトからパレットまでの距離が計測され、複数の計測点を含む3次元の点群データが取得される。そして、3次元の点群データに基づいて、パレットの正面に相当する平面が推定され、その平面上にグリッドを作成することで、平面上に対して複数のグリッドセルが設定される。そして、複数のグリッドセルについて平面から計測点までの距離をグリッド値として算出した2次元マップが作成される。そして、2次元マップに基づいて、複数のグリッドセルのうち取得部により点群データが取得されずに計測点のデータ抜けが発生した未計測グリッドセルがあるかどうかが判定される。未計測グリッドセルがあると判定されたときは、未計測グリッドセルのクリッド値を補間することで、2次元マップが補正される。そして、作成または補正された2次元マップに基づいて、パレットの位置が決定される。このようにセンサを使用して3次元の点群データを取得することにより、2次元の画像データを取得するカメラ等が不要となる。また、2次元マップを作成することにより、大量の学習データを作成しなくても、パレットの位置が検知される。従って、コスト及び手間が抑えられる。さらに、未計測グリッドセルがあるときは、未計測グリッドセルのグリッド値を補間することにより、適切な2次元マップが得られる。従って、パレットの位置が精度良く検知される。
【0008】
(2)上記の(1)において、パレット検知装置は、パレットの寸法を含むパレット情報に応じたテンプレートを記憶する記憶部を更に備え、位置決定部は、マップ作成部により作成された2次元マップまたはマップ補正部により補正された2次元マップと記憶部に記憶されたテンプレートとをマッチングさせて、パレットの位置を決定してもよい。
【0009】
このような構成では、2次元マップとパレットの寸法を含むパレット情報に応じたテンプレートとをマッチングさせることにより、パレットの位置が更に精度良く検知される。
【0010】
(3)上記の(1)または(2)において、判定部は、マップ作成部により作成された2次元マップに基づいて、未計測グリッドセルと、取得部により点群データが取得されたが計測点が存在しない計測点無グリッドセルとがあるかどうかを判定し、マップ補正部は、判定部により未計測グリッドセルがあると判定されたときは、未計測グリッドセルのグリッド値を補間することで、マップ作成部により作成された2次元マップを補正し、判定部により計測点無グリッドセルがあると判定されたときは、計測点無グリッドセルのグリッド値を補間しなくてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
排気管
今日
株式会社豊田自動織機
荷役制御装置
今日
株式会社豊田自動織機
自動運転車両
今日
株式会社豊田自動織機
段積みケース構造
今日
株式会社豊田自動織機
回転電機のステータ
今日
株式会社豊田自動織機
スクロール型圧縮機
今日
株式会社豊田自動織機
屋外自動運転システム
今日
豊田合成株式会社
車両用外装品
今日
トヨタ自動車株式会社
ロールプレス装置
今日
トヨタ自動車株式会社
電池の製造方法、及び、電池
1日前
株式会社豊田中央研究所
ハイブリッド車両の制御装置
1日前
株式会社豊田中央研究所
距離認識制御システム、電磁波信号発振装置、距離認識制御プログラム
今日
個人
自走手摺
2か月前
ユニパルス株式会社
吊具
3か月前
個人
海上コンテナ昇降装置
9か月前
ユニパルス株式会社
荷役装置
8か月前
ユニパルス株式会社
吊具装置
10か月前
水戸工業株式会社
吊り具
5か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社豊田自動織機
産業車両
10か月前
株式会社いうら
車椅子用昇降機
2か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
産業車両
22日前
ユニパルス株式会社
リフト装置
4か月前
白山工業株式会社
バランサ
6か月前
愛知製鋼株式会社
受け架台
1か月前
大栄産業株式会社
クランプ
4か月前
株式会社大林組
安全支援システム
1か月前
株式会社伊藤
滑り止め装置
2か月前
個人
垂直自動搬送機
23日前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
4か月前
ユニパルス株式会社
荷役助力装置
5か月前
株式会社ユピテル
システム等
5か月前
個人
建築部材の吊り上げ装置
11か月前
株式会社キトー
タイヤ用吊具
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ