TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145200
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045262
出願日
2024-03-21
発明の名称
作業装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
11/00 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来構造よりもコンパクト化を図ると共に製造コストの低減を図ることができる作業装置を提供する。
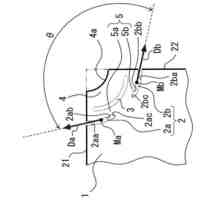
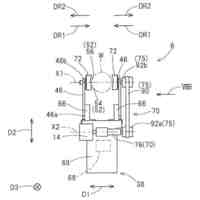
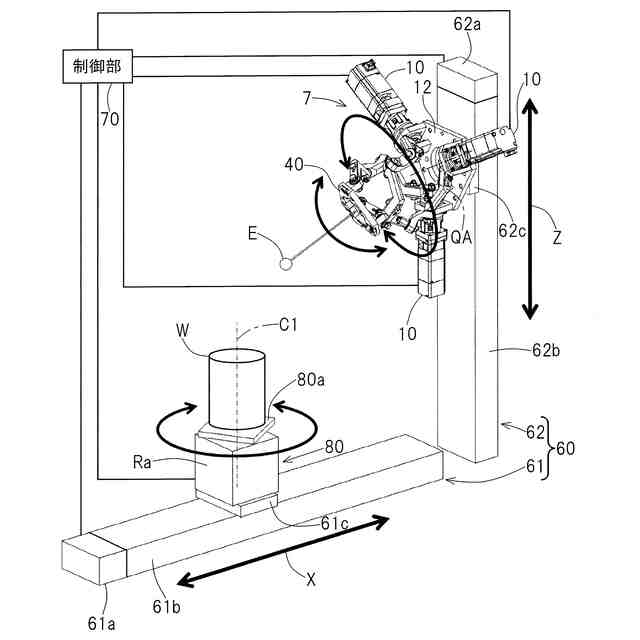
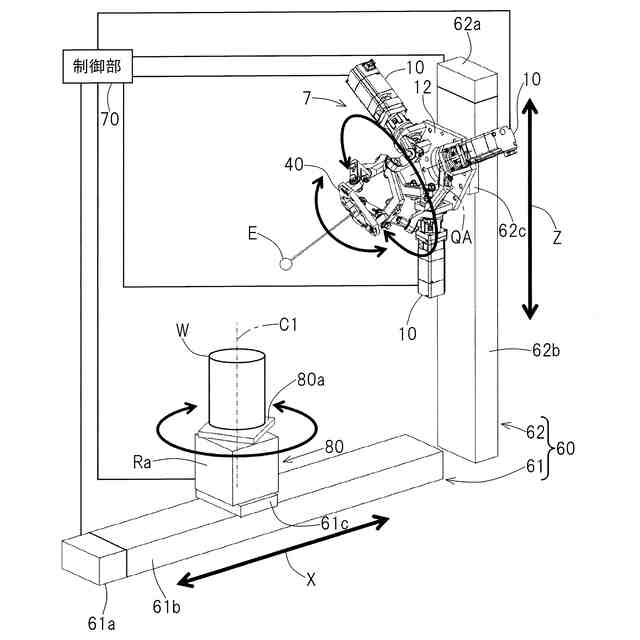
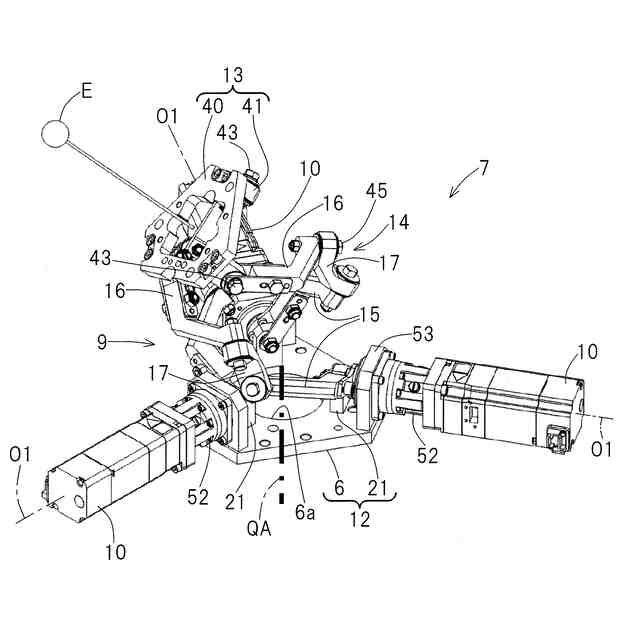
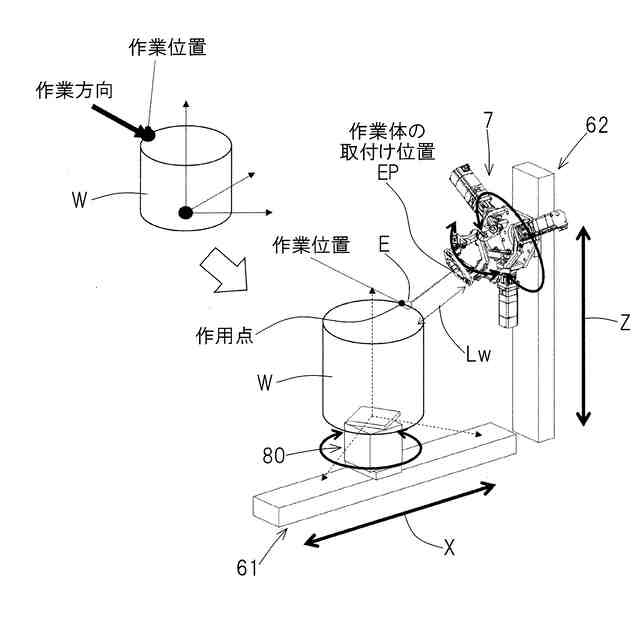
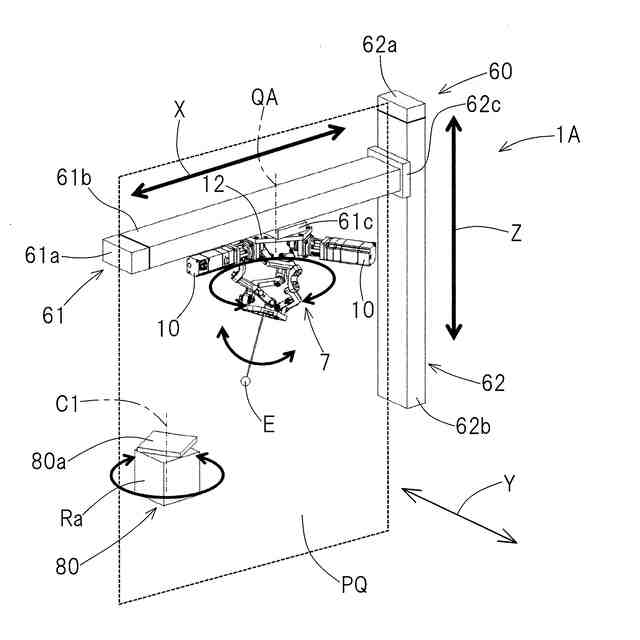
【解決手段】作業装置1は、直交2軸の直動アクチュエータを有する直動機構部60と、回転アクチュエータRaを有する回転機構部80と、作業体Eを回転2自由度の角度に位置決めする回転アクチュエータ10を有する角度制御機構部7とを備える。さらに直動機構部60、回転機構部80および角度制御機構部7の位置・角度を決定して各アクチュエータに移動指令を与える制御部70を備える。制御部70からの移動指令に従って、作業体の取付け位置と作業位置との距離が指定した値となるように作業を行う。回転機構部80の回転軸C1と、角度制御機構部7の基端側中心軸QAとが角度を保った状態で、回転機構部80と角度制御機構部7の相対位置を変更できるように、回転機構部80および角度制御機構部7の少なくともいずれか一方を直動機構部60に搭載した。
【選択図】図1
特許請求の範囲
【請求項1】
移動方向が互いに直交する2軸の直動アクチュエータを有する直動機構部と、
被作業体を1回転軸回りに回転させる回転アクチュエータを有する回転機構部と、
作業体を回転2自由度の角度に位置決めする回転アクチュエータを有する角度制御機構部と、
前記直動機構部、前記回転機構部および前記角度制御機構部の位置・角度を決定して各アクチュエータに移動指令を与える制御部と、を備える作業装置であって、
前記作業体は、前記制御部からの移動指令に従って、作業を行う前記作業体の取付け位置と、前記作業体にて作業が行われる作業位置との距離が指定した値となるように作業を行うように備えられ、
前記回転機構部の回転軸と、前記角度制御機構部の基端側中心軸とが角度を保った状態で、前記回転機構部と前記角度制御機構部の相対位置を変更できるように、前記回転機構部および前記角度制御機構部の少なくともいずれか一方を、前記直動機構部に搭載した作業装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の作業装置において、前記回転機構部における、前記回転軸が移動する場合の回転軸の延長線上で形成される仮想平面または前記回転軸が移動しない場合の回転軸と、前記角度制御機構部における、前記基端側中心軸が移動する場合の回転軸の延長線上で形成される仮想平面または前記基端側中心軸が移動しない場合の基端側中心軸と、が平行または同一平面上にある作業装置。
【請求項3】
請求項1または請求項2に記載の作業装置において、前記制御部は、前記被作業体の作業位置情報および作業方向から前記回転機構部への指令回転角度を決定する回転演算部と、
この回転演算部で決定された前記指令回転角度から、前記直動アクチュエータへの指令位置と、前記角度制御機構部への指令角度を決定する座標変換部と、を有する作業装置。
【請求項4】
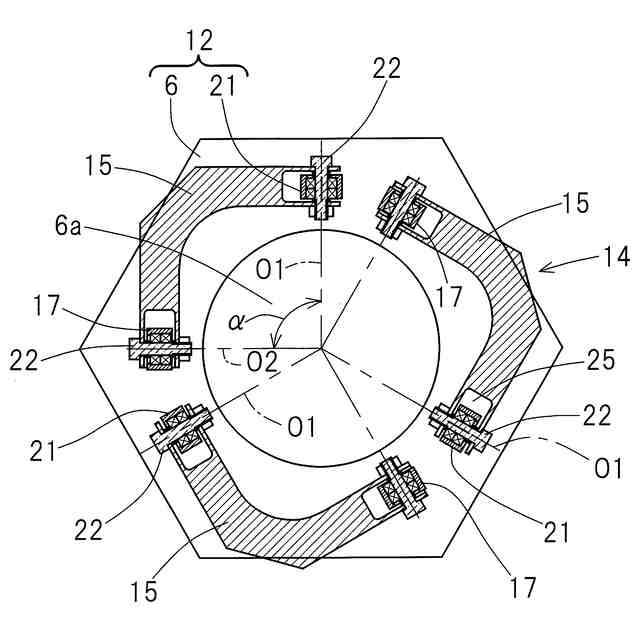
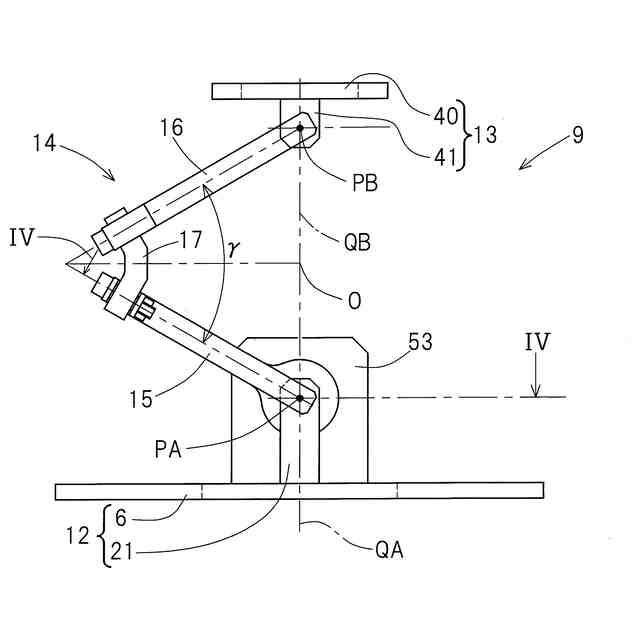
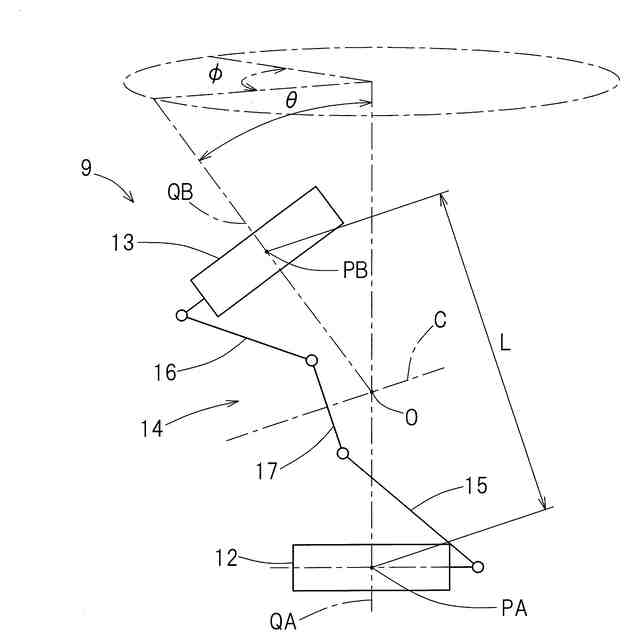
請求項1または請求項2に記載の作業装置において、前記角度制御機構部はリンク作動装置であり、このリンク作動装置は、基端側のリンクハブに対し先端側のリンクハブが3組以上のリンク機構を介して姿勢を変更可能に連結され、
前記各リンク機構が、それぞれ前記基端側のリンクハブおよび前記先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを有し、
前記3組以上のリンク機構のうちの2組以上のリンク機構に、前記先端側のリンクハブの姿勢を任意に制御する姿勢制御用アクチュエータである前記回転アクチュエータを備えた作業装置。
【請求項5】
請求項1または請求項2に記載の作業装置において、前記直動機構部の前記2軸の直動アクチュエータの移動方向それぞれに直交する移動方向の他の直動アクチュエータをさらに備え、前記他の直動アクチュエータは、前記被作業体の座標から機械座標に変換する座標変換を微調整可能なストロークを有する作業装置。
【請求項6】
請求項1または請求項2に記載の作業装置において、前記作業体は、前記被作業体と接触しない非接触型である作業装置。
【請求項7】
請求項6に記載の作業装置において、前記作業体はカメラを含み、前記被作業体を検査する外観検査装置である作業装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、医療機器または産業機器等の高速、高精度、広範な作動範囲、および木目細かい動作を必要する機器に用いられるコンパクトな作業装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
被作業体に対して、作業体にて作業を行う作業装置として、特許文献1,2のような構成が提案されている。
特許文献1の図1に示す装置では、互いに直交するX軸、Y軸、Z軸の直交3軸方向にヘッド部を移動させる機構、および前記ヘッド部の先端に回転機構を介して作業体が取り付けられた技術等が開示されている。
特許文献2では、垂直多関節ロボットを用いて物品を検査する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-64644号公報
特開2017-26441号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような構成では、定盤上に支持された被作業体の側面全周に対して作業する場合、作業体を被作業体の全周方向に移動させる必要がある。このため、装置サイズが大きくなるうえ、部品点数が多くなり構造が複雑化することにより製造コストが嵩む等の課題があった。
【0005】
特許文献2のような垂直多関節ロボットの構成では、ロボット全体の移動量が大きいため、安全柵等を設けると装置全体のサイズが大きくなるといった課題があった。
【0006】
本発明の目的は、従来構造よりもコンパクト化を図ると共に製造コストの低減を図ることができる作業装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の作業装置は、移動方向が互いに直交する2軸の直動アクチュエータを有する直動機構部と、
被作業体を1回転軸回りに回転させる回転アクチュエータを有する回転機構部と、
作業体を回転2自由度の角度に位置決めする回転アクチュエータを有する角度制御機構部と、
前記直動機構部、前記回転機構部および前記角度制御機構部の位置・角度を決定して各アクチュエータに移動指令を与える制御部と、を備える作業装置であって、
前記作業体は、前記制御部からの移動指令に従って、作業を行う前記作業体の取付け位置と、前記作業体にて作業が行われる作業位置との距離が指定した値となるように作業を行うように備えられ、
前記回転機構部の回転軸と、前記角度制御機構部の基端側中心軸とが角度を保った状態で、前記回転機構部と前記角度制御機構部の相対位置を変更できるように、前記回転機構部および前記角度制御機構部の少なくともいずれか一方を、前記直動機構部に搭載した。
【0008】
この構成によると、直動機構部の1自由度分を回転機構部と角度制御機構部の相対位置関係で補うことができる。このため、直動機構部が2自由度でも、被作業体の複数方向から作業体に対して作業でき、従来構造よりも作業装置の幅方向または奥行方向の寸法を大幅にコンパクト化できる。直動機構部の1自由度分を低減できる分、従来構造よりも部品点数を低減し構造を簡単化することで、製造コストの低減を図れる。但し、直動機構部の1自由度分を減らしたことで、所望の位置に作業するための教示作業に制限項目が増え、ある程度の専門知識を有していないと教示作業が難しくなることが懸念される。しかし、本発明の作業装置は制御部を有しているため、自動で複雑な座標変換を制御部で実施でき、作業者は専門知識を有していなくても簡単に教示作業を実施できる。
【0009】
前記回転機構部における、前記回転軸が移動する場合の回転軸の延長線上で形成される仮想平面または前記回転軸が移動しない場合の回転軸と、前記角度制御機構部における、前記基端側中心軸が移動する場合の回転軸の延長線上で形成される仮想平面または前記基端側中心軸が移動しない場合の基端側中心軸と、が平行または同一平面上にあってもよい。
回転機構部の回転軸移動平面または回転軸と、角度制御機構部の基端側中心軸移動平面または基端側中心軸とを平行に配置することで、直動機構部の移動方向と角度制御機構部の基端側中心軸とが平行になり、教示作業が容易になる。さらに、回転機構部と角度制御機構部が同一平面上を動く構成にすると、余分なスペースが少なくなり、作業装置の幅方向または奥行方向のサイズが最もコンパクトになる。
【0010】
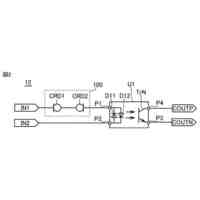
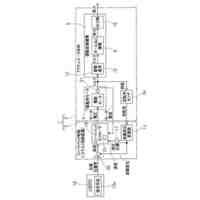
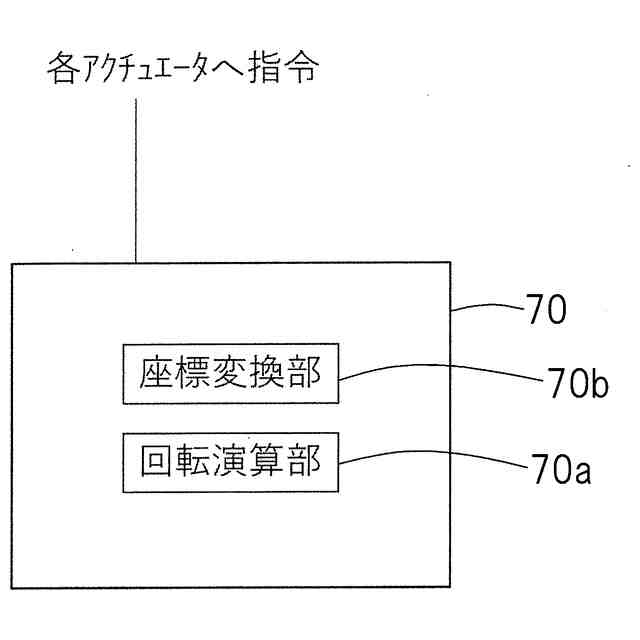
前記制御部は、前記被作業体の作業位置情報および作業方向から前記回転機構部への指令回転角度を決定する回転演算部と、
この回転演算部で決定された前記指令回転角度から、前記直動アクチュエータへの指令位置と、前記角度制御機構部への指令角度を決定する座標変換部と、を有してもよい。
この構成によると、座標変換を容易に実施できるようになる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
基板
8日前
NTN株式会社
玉軸受
17日前
NTN株式会社
玉軸受
16日前
NTN株式会社
玉軸受
9日前
NTN株式会社
ハンド
3日前
NTN株式会社
密封装置
1日前
NTN株式会社
作業装置
1日前
NTN株式会社
軸受装置
15日前
NTN株式会社
把持装置
3日前
NTN株式会社
把持装置
3日前
NTN株式会社
転がり軸受
3日前
NTN株式会社
転がり軸受
9日前
NTN株式会社
回転伝達装置
1日前
NTN株式会社
状態監視装置
2日前
NTN株式会社
軸受用保持器
29日前
NTN株式会社
シール付軸受
1日前
NTN株式会社
円筒ころ軸受
17日前
NTN株式会社
等速自在継手
15日前
NTN株式会社
基板取付構造
15日前
NTN株式会社
モータユニット
5日前
NTN株式会社
円すいころ軸受
8日前
NTN株式会社
電動モータ装置
17日前
NTN株式会社
車輪用軸受装置
17日前
NTN株式会社
車輪用軸受装置
1日前
NTN株式会社
保持器付きころ
5日前
NTN株式会社
動力伝達シャフト
15日前
NTN株式会社
プランマブロック
15日前
NTN株式会社
電動オイルポンプ
2日前
NTN株式会社
状態監視システム
2日前
NTN株式会社
直動アクチュエータ
15日前
NTN株式会社
摺動式等速自在継手
9日前
NTN株式会社
摺動式等速自在継手
15日前
NTN株式会社
直動アクチュエータ
16日前
NTN株式会社
固定式等速自在継手
9日前
NTN株式会社
固定式等速自在継手
9日前
NTN株式会社
固定式等速自在継手
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ