TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153578
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056120
出願日
2024-03-29
発明の名称
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】隣り合うようにワークが配置されている場合でも、ワークを持ち上げて搬送することと、ワークを配置することとのうちの少なくとも一方を適切に実行することが可能なワーク搬送ロボットを提供する。
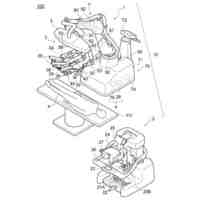
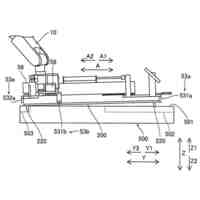
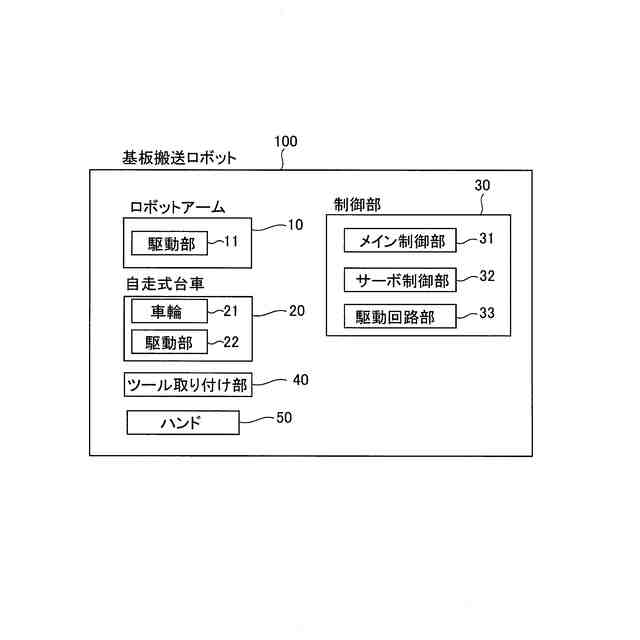
【解決手段】この基板搬送ロボット100では、制御部30は、基板200を持ち上げて搬送する際に、基板200の端部を把持部53aにより浮かせることにより、基板200を水平面に対して傾斜させて、水平面に対して傾斜した状態の基板200を把持部53bにより把持させることと、基板200を配置する際に、把持部53aおよび把持部53bに把持された基板200の端部を下降させることにより、基板200を水平面に対して傾斜させて、水平面に対して傾斜した状態の基板200の把持部53bによる把持を解除させることと、のうちの少なくとも一方の処理を実行する。
【選択図】図12
特許請求の範囲
【請求項1】
ロボットアームと、
前記ロボットアームに取り付けられ、ワークを把持するハンドと、
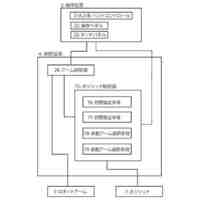
前記ロボットアームおよび前記ハンドの動作を制御する制御部と、を備え、
前記ハンドは、
前記ワークを水平方向に沿った第1の方向から前記ワークを把持する第1把持部と、
前記ワークを前記第1の方向に交差する水平方向に沿った第2の方向から前記ワークを把持する第2把持部と、を含み、
前記制御部は、
前記ワークを持ち上げて搬送する際に、前記ワークの端部を前記第1把持部により浮かせることにより、前記ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態の前記ワークを前記第2把持部により把持させることと、
前記ワークを配置する際に、前記第1把持部および前記第2把持部に把持された前記ワークの端部を下降させることにより、前記ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態の前記ワークの前記第2把持部による把持を解除させることと、のうちの少なくとも一方の処理を実行する、ワーク搬送ロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記第1把持部は、前記第1の方向における前記ワークの一方の端部を持ち上げる第1爪部を含む、請求項1に記載のワーク搬送ロボット。
【請求項3】
前記第1把持部は、前記第1の方向における前記ワークの他方の端部に当接する当接部を含み、
前記制御部は、前記第1爪部と前記当接部とにより前記ワークを前記第1の方向から把持する処理を実行する、請求項2に記載のワーク搬送ロボット。
【請求項4】
前記第2把持部は、前記ワークを前記第2の方向から前記ワークを把持する一対の第2爪部を含む、請求項1に記載のワーク搬送ロボット。
【請求項5】
前記第1把持部を駆動する第1駆動部と、
前記第2把持部を駆動する第2駆動部と、を備え、
前記制御部は、
前記第1把持部により前記ワークの一方の端部を持ち上げて前記ワークの一方の端部を浮かすように前記ロボットアームを制御し、
前記一方の端部を浮かせることにより水平面に対して傾斜した状態の前記ワークを前記第2把持部により前記第2の方向から把持するように前記第2駆動部を制御し、
前記第2把持部により把持された状態の前記ワークを前記第1把持部により前記第1の方向から把持するように前記第1駆動部を制御する、請求項1に記載のワーク搬送ロボット。
【請求項6】
前記第1把持部を駆動する第1駆動部と、
前記第2把持部を駆動する第2駆動部と、を備え、
前記制御部は、
前記第1把持部および前記第2把持部に把持された状態の前記ワークの端部が下降するように前記ロボットアームを制御し、
端部が下降し、水平面に対して傾斜した状態の前記ワークの前記第1把持部および前記第2把持部による把持を解除するように、前記第1駆動部および前記第2駆動部を制御する、請求項1に記載のワーク搬送ロボット。
【請求項7】
前記ロボットアームが載置される自走式台車を備え、
前記制御部は、
前記ワークが処理される処理機まで、前記自走式台車を移動させ、
前記処理機により処理された後の前記ワークを、前記処理機から水平面に対して傾斜させた後持ち上げて収容部に収容させ、
前記収容部に収容された処理前の前記ワークを前記収容部から取り出して前記処理機に対して水平面に対して傾斜させた後配置させる処理を実行する、請求項1に記載のワーク搬送ロボット。
【請求項8】
前記ワーク搬送ロボットは、垂直多関節ロボットである、請求項1に記載のワーク搬送ロボット。
【請求項9】
前記ワークは、積層された複数のワーク部を含み、
前記積層された前記複数のワーク部が仮固定部材により仮固定されている、請求項1に記載のワーク搬送ロボット。
【請求項10】
前記ワークは、前記第2の方向に隣接するように複数配置されている、請求項1に記載のワーク搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ワーク搬送ロボットおよびワーク搬送ロボットの制御方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
従来、ワーク搬送ロボットが開示されている。特許文献1には、工業用ロボットが開示されている。工業用ロボットは、ワーク保持装置を備えている。ワーク保持装置は、ワークとなるガラス基板を保持する。ガラス基板は、矩形形状を有する。ワーク保持装置は、第1の挾持手段と、第2の挾持手段と、を含む。第1の挾持手段は、爪を有する。第1の挾持手段の爪は、第1の方向からガラス基板の対向する2辺を挾持する。第2の挾持手段は、一対の回動アームを有する。一対の回動アームは、第2の方向からガラス基板の対向する2辺を挾持する。
【先行技術文献】
【特許文献】
【0003】
特開平5-154431号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、複数のガラス基板が、第2の方向に隣接するように配置されている場合において、特許文献1のような構成では、第2の挾持手段の一対の回動アームが第2の方向からガラス基板を挾持する際には、一対の回動アームが挾持する対象となるガラス基板に隣り合うガラス基板と干渉する。このため、ガラス基板を持ち上げて搬送することが適切にできない。同様に、すでに配置されているガラス基板に隣り合うように、ガラス基板を配置することが適切にできないという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、隣り合うようにワークが配置されている場合でも、ワークを持ち上げて搬送することと、ワークを配置することとのうちの少なくとも一方を適切に実行することが可能なワーク搬送ロボットおよびワーク搬送ロボットの制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるワーク搬送ロボットは、ロボットアームと、ロボットアームに取り付けられ、ワークを把持するハンドと、ロボットアームおよびハンドの動作を制御する制御部と、を備え、ハンドは、ワークを水平方向に沿った第1の方向からワークを把持する第1把持部と、ワークを第1の方向に交差する水平方向に沿った第2の方向からワークを把持する第2把持部と、を含み、制御部は、ワークを持ち上げて搬送する際に、ワークの端部を第1把持部により浮かせることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークを第2把持部により把持させることと、ワークを配置する際に、第1把持部および第2把持部に把持されたワークの端部を下降させることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークの第2把持部による把持を解除させることと、のうちの少なくとも一方の処理を実行する。なお、水平面に対して傾斜するとは、地球の重力の方向に垂直な平面に対して傾斜するという意味だけではなく、ワークが配置される面に対して傾斜することをも含む広い概念である。
【0007】
この開示の第1の局面によるワーク搬送ロボットは、上記のように、制御部は、ワークを持ち上げて搬送する際に、ワークの端部を第1把持部により浮かせることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークを第2把持部により把持させることと、ワークを配置する際に、第1把持部および第2把持部に把持されたワークの端部を下降させることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークの第2把持部による把持を解除させることと、のうちの少なくとも一方の処理を実行する。これにより、ワークを持ち上げて搬送する際には、ワークが水平面に対して傾斜しているので、把持対象のワークの高さ位置は、隣り合うワークの高さ位置とずれている。その結果、第2把持部が隣り合うワークと干渉することなく、第2把持部がワークを把持できる。そのため、ワーク搬送ロボットは、適切に、ワークを持ち上げて搬送できる。また、ワークを配置する際には、ワークが水平面に対して傾斜しているので、第1把持部および第2把持部が把持しているワークの高さ位置は、既に配置されたワークの高さ位置とずれている。その結果、第2把持部が隣り合うワークと干渉することなく、第2把持部によるワークの把持を解除できる。そのため、ワーク搬送ロボットは、適切に、ワークを配置できる。これらの結果、ワーク搬送ロボットは、隣り合うようにワークが配置されている場合でも、ワークを持ち上げて搬送することと、ワークを配置することとのうちの少なくとも一方を適切に実行できる。
【0008】
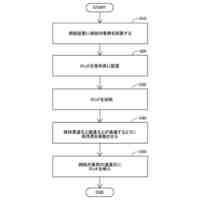
この開示の第2の局面によるワーク搬送ロボットの制御方法は、ロボットアームと、ロボットアームに取り付けられ、ワークを把持するハンドと、ロボットアームおよびハンドの動作を制御する制御部と、を備え、ハンドは、ワークを水平方向に沿った第1の方向からワークを把持する第1把持部と、ワークを第1の方向に交差する水平方向に沿った第2の方向からワークを把持する第2把持部と、を含む、ワーク搬送ロボットの制御方法であって、ワークを持ち上げて搬送する際に、ワークの端部を第1把持部により浮かせることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークを第2把持部により把持させることと、ワークを配置する際に、第1把持部および第2把持部に把持されたワークの端部を下降させることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークの第2把持部による把持を解除させることと、のうちの少なくとも一方を備える。なお、水平面に対して傾斜するとは、地球の重力の方向に垂直な平面に対して傾斜するという意味だけではなく、ワークが配置される面に対して傾斜することをも含む広い概念である。
【0009】
この開示の第2の局面によるワーク搬送ロボットの制御方法は、上記のように、ワークを持ち上げて搬送する際に、ワークの端部を第1把持部により浮かせることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークを第2把持部により把持させることと、ワークを配置する際に、第1把持部および第2把持部に把持されたワークの端部を下降させることにより、ワークを水平面に対して傾斜させて、水平面に対して傾斜した状態のワークの第2把持部による把持を解除させることと、のうちの少なくとも一方を備える。これにより、ワークを持ち上げて搬送する際には、ワークが水平面に対して傾斜しているので、把持対象のワークの高さ位置は、隣り合うワークの高さ位置とずれている。その結果、第2把持部が隣り合うワークと干渉することなく、第2把持部がワークを把持できる。そのため、ワーク搬送ロボットは、適切に、ワークを持ち上げて搬送できる。また、ワークを配置する際には、ワークが水平面に対して傾斜しているので、第1把持部および第2把持部が把持しているワークの高さ位置は、既に配置されたワークの高さ位置とずれている。その結果、第2把持部が隣り合うワークと干渉することなく、第2把持部によるワークの把持を解除できる。そのため、ワーク搬送ロボットは、適切に、ワークを配置できる。これらの結果、ワーク搬送ロボットは、隣り合うようにワークが配置されている場合でも、ワークを持ち上げて搬送することと、ワークを配置することとのうちの少なくとも一方を適切に実行が可能なワーク搬送ロボットの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、ワーク搬送ロボットおよびワーク搬送ロボットの制御方法は、隣り合うようにワークが配置されている場合でも、ワークを持ち上げて搬送することと、ワークを配置することとのうちの少なくとも一方を適切に実行することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1日前
川崎重工業株式会社
断熱配管
1日前
川崎重工業株式会社
塗装システム
1日前
川崎重工業株式会社
監視システム
2日前
川崎重工業株式会社
配管の支持構造
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
川崎重工業株式会社
極低温流体用配管設備
3日前
川崎重工業株式会社
締結方法及び締結装置
8日前
川崎重工業株式会社
ロボットの診断システム
2日前
株式会社キッツ
逆流防止弁
2日前
川崎重工業株式会社
支援システムおよび支援方法
1日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1日前
川崎重工業株式会社
アンモニア回収システム及び方法
1日前
川崎重工業株式会社
配管の接続構造および配管システム
4日前
川崎重工業株式会社
ロボットシステム及びその動作方法
3日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1日前
川崎重工業株式会社
油圧ショベルの油圧システムおよびブーム制御弁
4日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
2日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
1日前
川崎重工業株式会社
ポート配置決定装置、手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
極低温用圧縮設備、及びそれを備えるボイルオフガス液化システム
3日前
川崎重工業株式会社
手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法
3日前
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
10日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ