TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025146130
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046751
出願日
2024-03-22
発明の名称
ロボットの制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移動部の移動中に移動部と物体とが接触した場合に、その移動部と物体とが接触する方向に応じて適切な復元力を発生することができるロボットの制御装置を提供する。
【解決手段】移動部と、移動部の位置を変更可能なアクチュエータとを備え、移動部の目標位置および移動部の実際の位置の偏差と仮想バネ定数とに基づいて、移動部を目標位置側に移動させるための復元力を設定するように構成されたロボットの制御装置であって、目標位置に対して実際の位置が移動部の進行方向における後方側となる場合に、目標位置に対して実際の位置が移動部の進行方向における前方側となる場合よりも、復元力を小さく設定する。この復元力の大きさは、機械学習などによって定めてもよい。
【選択図】図5
特許請求の範囲
【請求項1】
移動部と、前記移動部の位置を変更可能なアクチュエータとを備え、前記移動部の目標位置および前記移動部の実際の位置の偏差と仮想バネ定数とに基づいて、前記移動部を前記目標位置側に移動させるための復元力を設定するように構成されたロボットの制御装置であって、
前記アクチュエータを制御するコントローラを備え、
前記コントローラは、
前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記復元力を小さく設定する
ことを特徴とするロボットの制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載のロボットの制御装置であって、
前記コントローラは、
予め定められた暫定仮想バネ定数を補正して仮想バネ定数を設定する補正仮想バネ定数算出部を備え、
前記補正仮想バネ定数算出部は、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記目標位置と前記実際の位置との偏差に対する前記仮想バネ定数が小さくなるように前記暫定仮想バネ定数を補正する
ことを特徴とするロボットの制御装置。
【請求項3】
請求項2に記載のロボットの制御装置であって、
前記補正仮想バネ定数算出部は、
予め定められた駆動側上限復元力を前記偏差で除算した値を、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合の前記仮想バネ定数として補正し、
前記駆動側上限復元力よりも大きい予め定められた制動側上限復元力を前記偏差で除算した値を、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合の前記仮想バネ定数として補正する
ことを特徴とするロボットの制御装置。
【請求項4】
請求項1に記載のロボットの制御装置であって、
前記コントローラは、
前記目標位置を補正する補正目標位置算出部を備え、
前記補正目標位置算出部は、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記実際の位置との偏差が小さくなるように前記目標位置を補正する
ことを特徴とするロボットの制御装置。
【請求項5】
請求項4に記載のロボットの制御装置であって、
前記補正目標位置算出部は、
予め定められた駆動側上限復元力を前記仮想バネ定数で除算した値に基づいて、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合の前記目標位置を補正し、
前記駆動側上限復元力よりも大きい予め定められた制動側上限復元力を前記仮想バネ定数で除算した値に基づいて、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合の前記目標位置を補正する
ことを特徴とするロボットの制御装置。
発明の詳細な説明
【技術分野】
【0001】
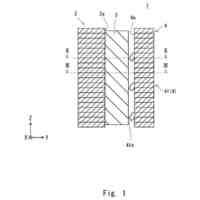
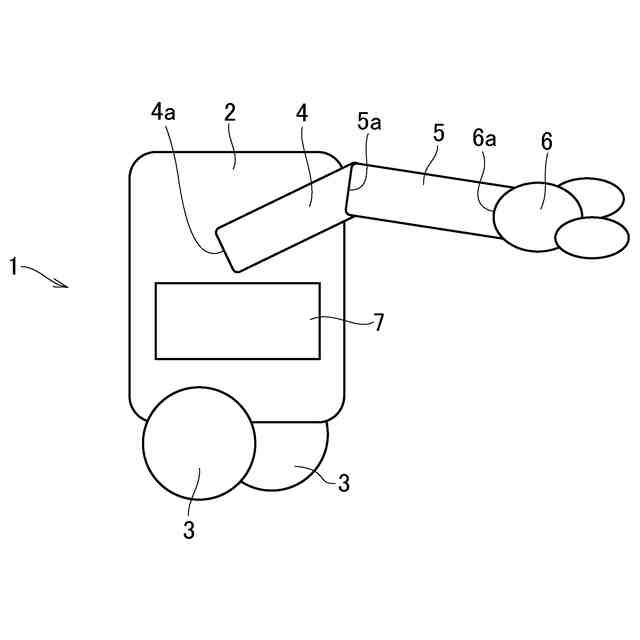
この発明は、アクチュエータによって前後方向または左右方向あるいは回動方向に移動する移動部を備えたロボットの制御装置に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、本体部と、本体部に連結された脚部とを備えたロボットの制御装置が記載されている。この脚部は、少なくとも一つの関節部を有し、その関節部には、関節部よりも先端側の部分の傾斜角度を変更するためのサーボモータが設けられている。このサーボモータによる出力トルクは、インピーダンス制御によって制御されるように構成されている。すなわち、慣性、減衰係数、仮想バネ定数、目標値、および現在値をパラメータとしたバネマスダンパモデルを生成し、現在値をセンサによって検出することにより、所望する姿勢を維持するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-099034号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
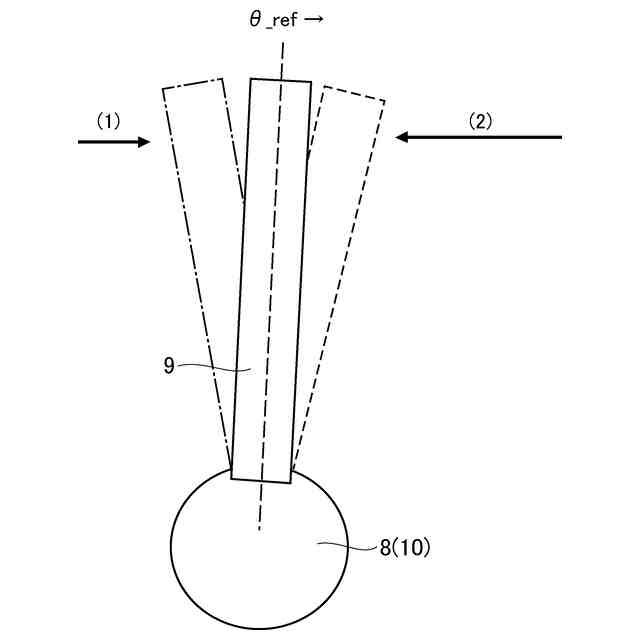
特許文献1に記載されたようにインピーダンス制御によってアクチュエータのトルクを制御する場合に、関節部の位置精度を向上させるためには、仮想バネ定数を大きく設定することになる。一方、ロボットの本体部から突出したアームなどの移動部には、その移動部を目標位置に制御するためにアクチュエータからトルクが作用するものの、移動部が何らかの物体に接触すると、その移動部の目標位置と現在位置との偏差が大きくなり、その結果、仮想バネ定数と上記偏差とを乗算して求められるばね荷重成分が大きくなる。そのため、関節部に作用する反力や、移動部が接触した対象物に作用する荷重が大きくなる可能性がある。特に、移動部の動作中に、その動作方向の対象物に接触した場合には、移動部を動作させるための荷重に、ばね荷重成分が付加されることになるため、関節部に作用する反力や、対象物に作用する荷重がより一層大きくなる可能性がある。
【0005】
この発明は上記の技術的課題に着目して考え出されたものであり、移動部の移動中に移動部と物体とが接触した場合に、その移動部と物体とが接触する方向に応じて適切な復元力を発生することができるロボットの制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
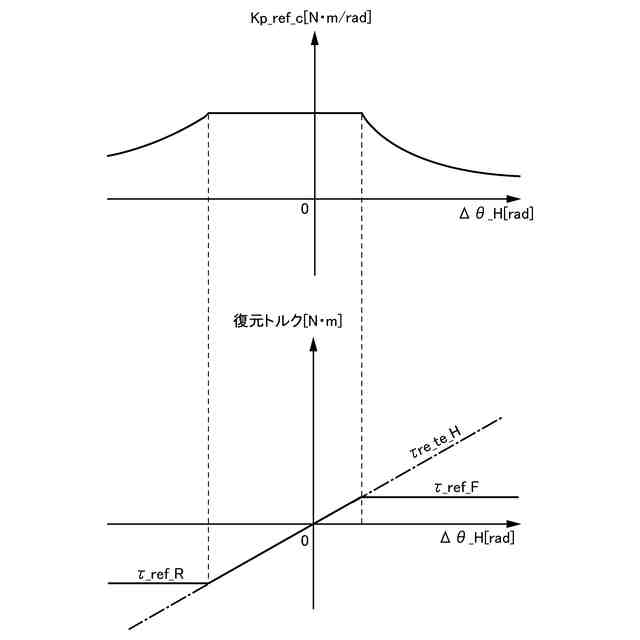
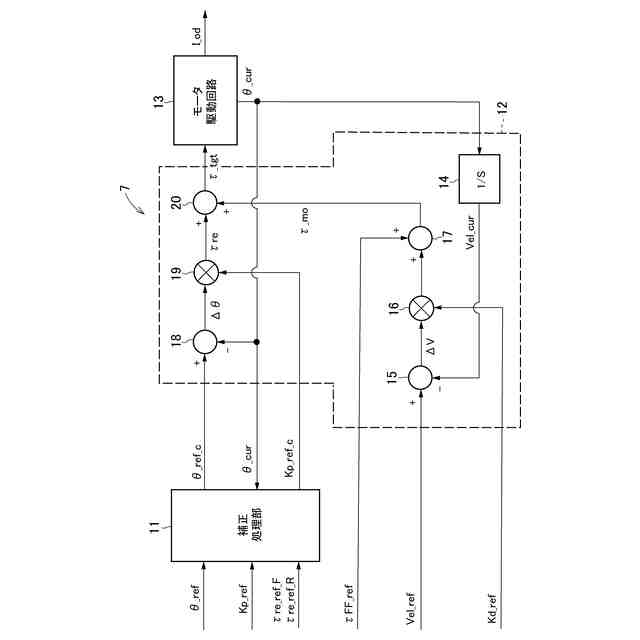
上記の目的を達成するために、この発明は、移動部と、前記移動部の位置を変更可能なアクチュエータとを備え、前記移動部の目標位置および前記移動部の実際の位置の偏差と仮想バネ定数とに基づいて、前記移動部を前記目標位置側に移動させるための復元力を設定するように構成されたロボットの制御装置であって、前記アクチュエータを制御するコントローラを備え、前記コントローラは、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記復元力を小さく設定することを特徴とするものである。
【0007】
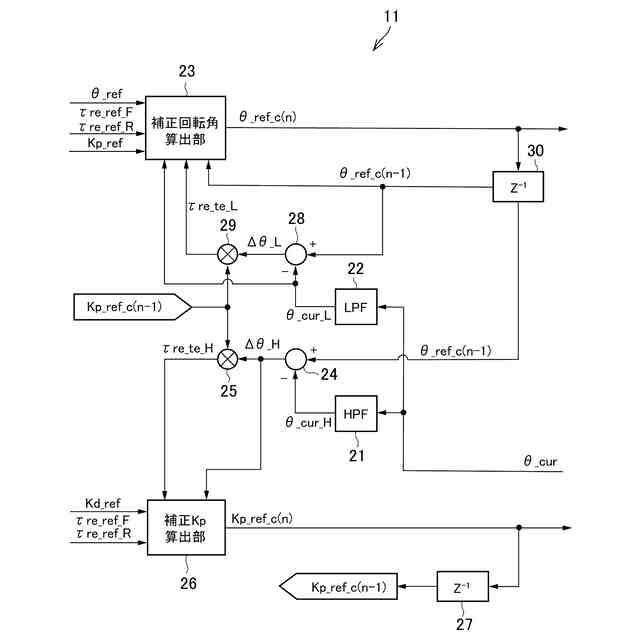
また、この発明における前記コントローラは、予め定められた暫定仮想バネ定数を補正して仮想バネ定数を設定する補正仮想バネ定数算出部を備え、前記補正仮想バネ定数算出部は、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記目標位置と前記実際の位置との偏差に対する前記仮想バネ定数が小さくなるように前記暫定仮想バネ定数を補正してよい。
【0008】
また、この発明における前記補正仮想バネ定数算出部は、予め定められた駆動側上限復元力を前記偏差で除算した値を、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合の前記仮想バネ定数として補正し、前記駆動側上限復元力よりも大きい予め定められた制動側上限復元力を前記偏差で除算した値を、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合の前記仮想バネ定数として補正してよい。
【0009】
また、この発明における前記コントローラは、前記目標位置を補正する補正目標位置算出部を備え、前記補正目標位置算出部は、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合に、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合よりも、前記実際の位置との偏差が小さくなるように前記目標位置を補正してよい。
【0010】
そして、この発明における前記補正目標位置算出部は、予め定められた駆動側上限復元力を前記仮想バネ定数で除算した値に基づいて、前記目標位置に対して前記実際の位置が前記移動部の進行方向における後方側となる場合の前記目標位置を補正し、前記駆動側上限復元力よりも大きい予め定められた制動側上限復元力を前記仮想バネ定数で除算した値に基づいて、前記目標位置に対して前記実際の位置が前記移動部の進行方向における前方側となる場合の前記目標位置を補正してよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
サーバ
13日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
電解液
5日前
トヨタ自動車株式会社
回転子
5日前
トヨタ自動車株式会社
ロータ
7日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
ケース
今日
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
回転子
20日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
制御装置
20日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
塗布装置
7日前
トヨタ自動車株式会社
育苗装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
水系電池
27日前
トヨタ自動車株式会社
駆動装置
5日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
電源装置
5日前
トヨタ自動車株式会社
表示装置
21日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ