TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129942
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026934
出願日
2024-02-26
発明の名称
歩行ロボット
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20250829BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】歩行のための制御および静止姿勢の制御のいずれにおいてもノイズの影響を低減して安定した歩行や姿勢の維持を可能にする。
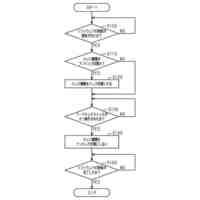
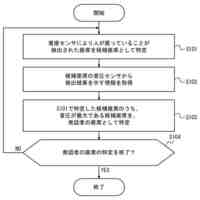
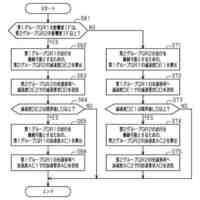
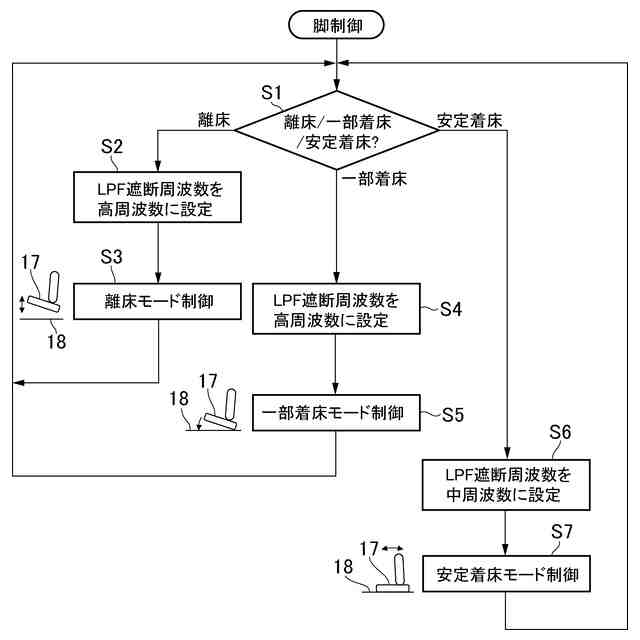
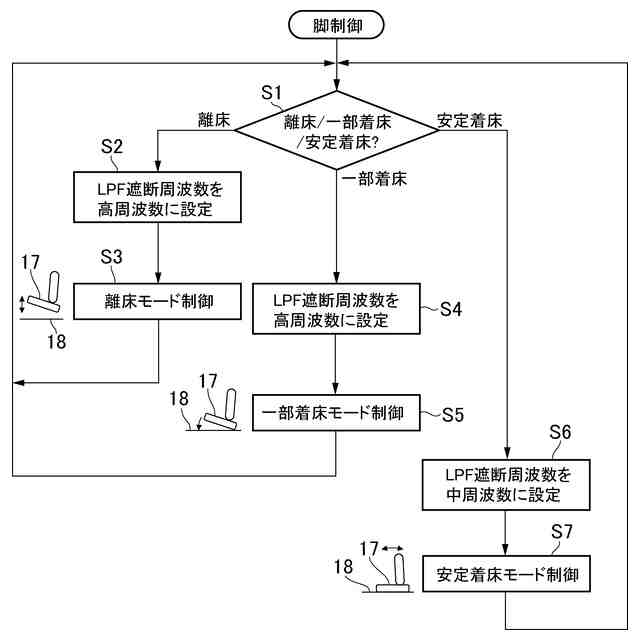
【解決手段】床面に接触して床反力を受ける足部を有し、センサによる検出信号に基づいて、歩行および静止姿勢を制御する歩行ロボットであって、センサによる検出信号に基づいて歩行および静止姿勢を制御するコントローラと、検出信号に含まれる所定の周波数の信号を遮断するフィルタとを有し、コントローラは、足部の下面の少なくとも一部が床面から離れている未着床状態と、足部の下面の全体が床面に着いている安定着床状態とを判定する着床判定部(ステップS1)と、着床判定部によって、未着床状態が判定されている場合と、安定着床状態が判定されている場合とで、フィルタによって遮断する信号の周波数を切り替えるフィルタ周波数設定部(ステップS2,S4,S6)とを備えている。
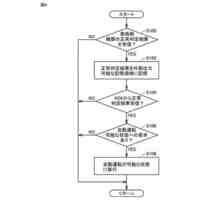
【選択図】図4
特許請求の範囲
【請求項1】
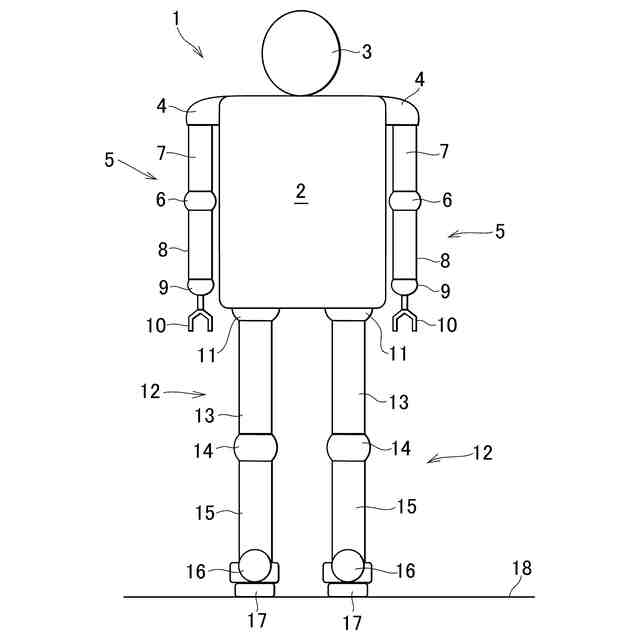
歩行および起立のための下肢部と前記下肢部の下端部に連結されかつ床面に接触して床反力を受ける足部とを有し、前記足部で受ける前記床反力をセンサによって検出するとともに前記センサによる検出信号に基づいて、歩行および静止姿勢を制御する歩行ロボットであって、
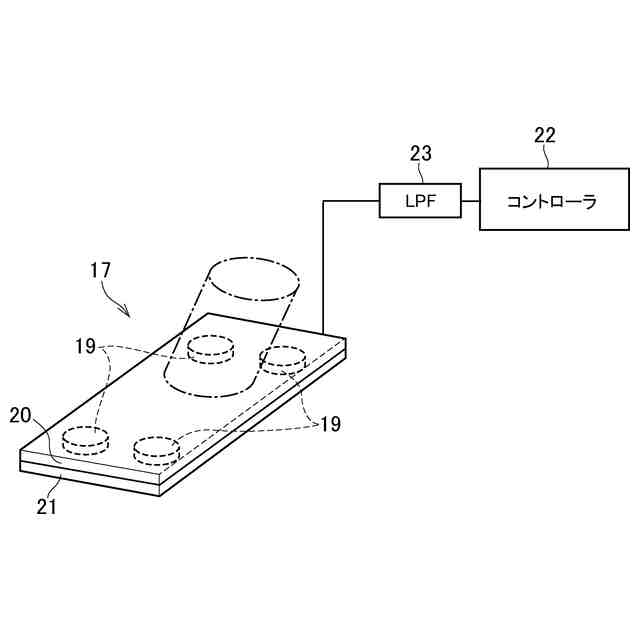
前記センサによる検出信号に基づいて歩行および静止姿勢を制御するコントローラと、
前記検出信号に含まれる所定の周波数の信号を遮断するフィルタとを有し、
前記コントローラは、
前記足部の下面の少なくとも一部が前記床面から離れている未着床状態と、前記足部の下面の全体が前記床面に着いている安定着床状態とを判定する着床判定部と、
前記着床判定部によって、前記未着床状態が判定されている場合と、前記安定着床状態が判定されている場合とで、前記フィルタによって遮断する信号の周波数を切り替えるフィルタ周波数設定部とを備えている
ことを特徴とする歩行ロボット。
続きを表示(約 280 文字)
【請求項2】
請求項1に記載の歩行ロボットであって、
前記フィルタ周波数設定部は、前記未着床状態が判定されている場合に遮断する信号の周波数を、前記安定着床状態が判定されている場合に遮断する信号の周波数より高い周波数とするように構成されている
ことを特徴とする歩行ロボット。
【請求項3】
請求項1または2に記載の歩行ロボットであって、
前記未着床状態は、前記足部が前記床面から離れている離床状態と、前記下肢部を下ろして前記足部の一部が前記床面に着いている一部着床状態とを含む
ことを特徴とする歩行ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、足部を使って移動するロボットに関し、特に床反力を検出して歩行を含む姿勢制御を行うように構成された歩行ロボットに関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
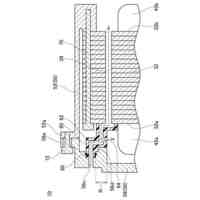
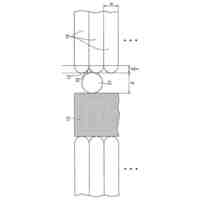
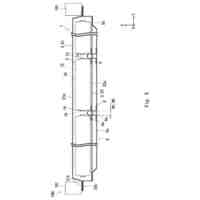
歩行ロボットにおける足部に作用する床反力を計測する装置の一例が特許文献1に記載されている。その装置は、床に接触する足裏プレートとその足裏プレートの上側に平行に配置した足甲プレートとの間の四隅に、力の大きさに応じた信号を出力するロードセルなどのセンサを配置した構成になっている。それらのセンサの出力信号は、足部に対する荷重の掛かり方を表しているので、センサの出力信号に基づいてロボットの動作状態や姿勢を求めることができる。例えば、ロボットが静止している状態での重心の位置を知ることができるので、ロボットを安定して直立させることができ、また引き上げた足部を下ろす際の床反力の変化に基づいてロボットの体重移動を制御することにより、安定かつスムースな歩行を行わせることができる。
【先行技術文献】
【特許文献】
【0003】
特開2022-148265号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
床反力はロボットの歩行や姿勢を制御するための重要なデータであり、したがって高精度にかつ高速に検出することが望まれる。一方、ロボットの動作はロボットに搭載してある電気モータを駆動力源として行う。また、ロボットが歩行する床面は必ずしも完全には平坦ではなく凹凸や傾斜が生じている場合があるうえに、風圧や周囲の設備機器などに接触することによる荷重を受けることがあり、これがセンサの検出値に影響することがある。さらには、ロボットが存在している環境によっては各種の電気機器から発生する信号が存在している場合もある。これら、床面の状態や外からの荷重さらには環境中に存在する多様な電気信号などが、センサによる検出信号にノイズとして混在する。
【0005】
各種の電気的に制御する装置においては、フィルタを使用してノイズを除去することが行われている。上述した特許文献1に記載されている床反力計測装置においてもセンサの検出信号に含まれる特定の周波数のノイズをフィルタによって遮断することが可能である。しかしながら、歩行ロボットにおいては、ロボットの姿勢や動作の状態に応じて、足部に対する床反力の掛かり方が大きく変化し、また床反力の変化の仕方あるいは速度が大きく異なる。すなわち、歩行を制御する場合と直立などの静止した状態での姿勢を制御する場合とでは、検出信号の周波数帯域が異なるだけでなく、要求される制御応答性が異なるので、特許文献1に記載されている床反力計測装置のセンサで検出した信号をフィルタ処理するとしても、遮断する周波数帯域によっては、歩行制御中のノイズが多くなってしまったり、あるいは反対に静止状態の姿勢制御中のノイズが多くなってしまったり、さらにはセンサの異常を必ずしも正確には検出もしくは判定できないなどの事態が生じる可能性がある。
【0006】
本発明は上記の技術的課題に着目してなされたものであって、歩行のための制御および静止姿勢の制御のいずれにおいてもノイズの影響を低減して安定した歩行や姿勢の維持を可能にする歩行ロボットを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は、上記の目的を達成するために、歩行および起立のための下肢部と前記下肢部の下端部に連結されかつ床面に接触して床反力を受ける足部とを有し、前記足部で受ける前記床反力をセンサによって検出するとともに前記センサによる検出信号に基づいて、歩行および静止姿勢を制御する歩行ロボットであって、前記センサによる検出信号に基づいて歩行および静止姿勢を制御するコントローラと、前記検出信号に含まれる所定の周波数の信号を遮断するフィルタとを有し、前記コントローラは、前記足部の下面の少なくとも一部が前記床面から離れている未着床状態と、前記足部の下面の全体が前記床面に着いている安定着床状態とを判定する着床判定部と、前記着床判定部によって、前記未着床状態が判定されている場合と、前記安定着床状態が判定されている場合とで、前記フィルタによって遮断する信号の周波数を切り替えるフィルタ周波数設定部とを備えていることを特徴とするものである。
【0008】
本発明においては、前記フィルタ周波数設定部は、前記未着床状態が判定されている場合に遮断する信号の周波数を、前記安定着床状態が判定されている場合に遮断する信号の周波数より高い周波数とするように構成されていてよい。
【0009】
本発明においては、前記未着床状態は、前記足部が前記床面から離れている離床状態と、前記下肢部を下ろして前記足部の一部が前記床面に着いている一部着床状態とを含んでいてよい。
【発明の効果】
【0010】
本発明によれば、歩行や静止姿勢などの動作の状態、より具体的には未着床状態と安定着床状態とに応じて、フィルタによって遮断する信号の周波数帯域を切り替えるから、動作の状態に基づく検出信号を精度よく抽出して歩行や姿勢制御を、安定して、また精度よく行うことができる。また、床反力が急速かつ多様に変化する未着床状態と床反力が比較的安定している安定着床状態とで共通したセンサを使用することが可能になるので、言い換えれば、動作の状態に応じた複数のセンサを用いる必要がないので、歩行ロボットの全体としての構成を簡素化あるいは小型化することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
7日前
トヨタ自動車株式会社
椅子
17日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
方法
17日前
トヨタ自動車株式会社
方法
17日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
治具
2日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車体
10日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
電磁弁
17日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
飛行体
14日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
加熱器
21日前
トヨタ自動車株式会社
正極層
7日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
電動機
7日前
トヨタ自動車株式会社
固定子
22日前
トヨタ自動車株式会社
サーバ
4日前
トヨタ自動車株式会社
駆動装置
8日前
トヨタ自動車株式会社
塗工装置
9日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ