TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154564
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057635
出願日
2024-03-29
発明の名称
牽引支援装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60R
99/00 20090101AFI20251002BHJP(車両一般)
要約
【課題】牽引車両と目標停車位置との位置関係および駐車角度によらず容易に経路生成を行うことができる。
【解決手段】実施形態の牽引支援装置は、被牽引車両を牽引する牽引車両の後退駐車を支援する牽引支援装置であって、牽引車両の側方側に進入口を有する駐車領域を検出する検出部と、予め設定されたデフォルト停車位置とデフォルト経路とに基づいて、牽引車両の前進経路と後退経路とを含む目標経路を生成する演算部と、を備え、演算部は、駐車領域に基づいて決定される目標停車位置と、デフォルト停車位置とのずれ量であって、牽引車両の前後方向における第1のずれ量と、牽引車両を駐車領域に駐車する際の駐車角度に応じて生じる、牽引車両の前後方向における第2のずれ量と、を算出し、第1及び第2のずれ量の合算値に基づいて前進経路を生成する。
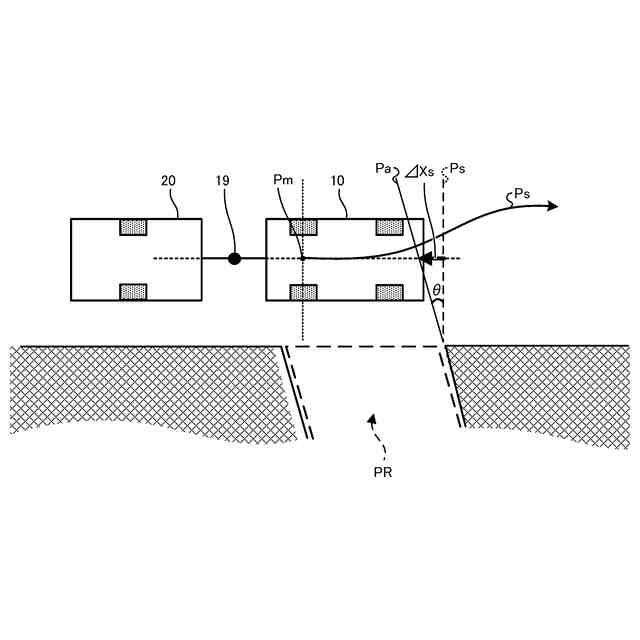
【選択図】図7
特許請求の範囲
【請求項1】
被牽引車両を牽引する牽引車両の後退駐車を支援する牽引支援装置であって、
前記牽引車両の側方側に進入口を有する駐車領域を検出する検出部と、
予め設定されたデフォルト停車位置とデフォルト経路とに基づいて、前記牽引車両の前進経路と後退経路とを含む目標経路を生成する演算部と、を備え、
前記演算部は、
前記駐車領域に基づいて決定される目標停車位置と、前記デフォルト停車位置とのずれ量であって、前記牽引車両の前後方向における第1のずれ量と、前記牽引車両を前記駐車領域に駐車する際の駐車角度に応じて生じる、前記牽引車両の前後方向における第2のずれ量と、を算出し、
前記第1及び第2のずれ量の合算値に基づいて前記前進経路を生成する、
牽引支援装置。
続きを表示(約 350 文字)
【請求項2】
前記演算部は、
前記合算値がプラスの値となる場合には、前記デフォルト経路の始点の位置をずらすとともに、前記合算値の分だけ前記牽引車両を前進させる予備経路を付加して前記前進経路を生成する、
請求項1に記載の牽引支援装置。
【請求項3】
前記演算部は、
前記合算値が所定量未満のマイナスの値となる場合には、前記デフォルト経路の始点の位置が維持された前記前進経路を生成する、
請求項1に記載の牽引支援装置。
【請求項4】
前記演算部は、
前記合算値がマイナスの値となる場合には、前記デフォルト経路の始点の位置から前記合算値の分だけ前記牽引車両を後退させる予備経路を生成する、
請求項1に記載の牽引支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、牽引支援装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
トレーラ等の被牽引車両を牽引するトラクタ等の牽引車両において牽引支援を行う装置が知られている。例えば被牽引車両を後退牽引する際の牽引支援では、牽引支援装置は、被牽引車両の目標経路を予め算出し、算出した目標経路上を被牽引車両が移動するよう牽引車両を制御する。
【0003】
例えば特許文献1の技術では、被牽引者について複数の後退経路パターンを記憶しておき、牽引支援においては、これらの後退経路パターンに基づいて、牽引車両の後退軌跡を複数生成し、その中から適正な後退軌跡を選定する。
【先行技術文献】
【特許文献】
【0004】
特開2023-044216号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の特許文献1の技術では、牽引支援開始時の牽引車両と目標停車位置との位置関係に応じて、複数の経路生成を行わなければならず、計算コストが増大するほか、駐車角度によっては経路生成の難易度が高まってしまう。
【0006】
本発明は、上記に鑑みてなされたものであって、牽引車両と目標停車位置との位置関係および駐車角度によらず容易に経路生成を行うことができる牽引支援装置を提供することである。
【課題を解決するための手段】
【0007】
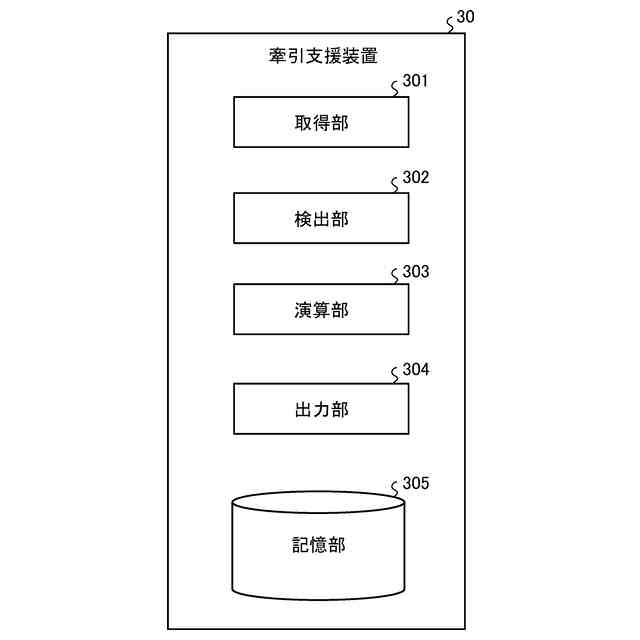
実施形態の牽引支援装置は、被牽引車両を牽引する牽引車両の後退駐車を支援する牽引支援装置であって、前記牽引車両の側方側に進入口を有する駐車領域を検出する検出部と、予め設定されたデフォルト停車位置とデフォルト経路とに基づいて、前記牽引車両の前進経路と後退経路とを含む目標経路を生成する演算部と、を備え、前記演算部は、前記駐車領域に基づいて決定される目標停車位置と、前記デフォルト停車位置とのずれ量であって、前記牽引車両の前後方向における第1のずれ量と、前記牽引車両を前記駐車領域に駐車する際の駐車角度に応じて生じる、前記牽引車両の前後方向における第2のずれ量と、を算出し、前記第1及び第2のずれ量の合算値に基づいて前記前進経路を生成する。
【0008】
実施形態の牽引支援装置は、牽引車両と目標停車位置との位置関係および駐車角度によらず容易に経路生成を行うことができる。
【図面の簡単な説明】
【0009】
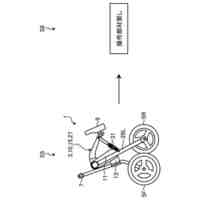
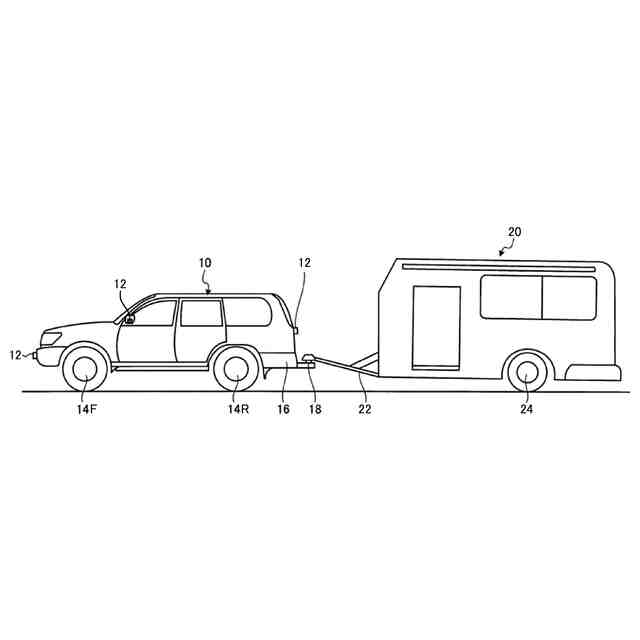
図1は、実施形態にかかるトラクタ及びトレーラを示す側面図である。
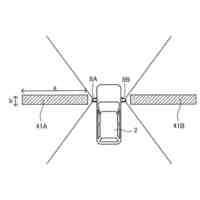
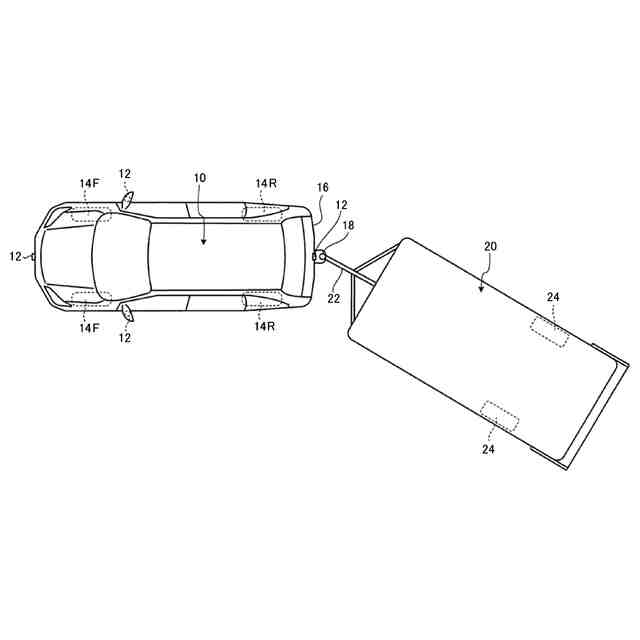
図2は、実施形態にかかるトラクタ及びトレーラを示す上面図である。
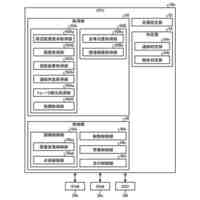
図3は、実施形態にかかるトラクタが備える牽引支援システムの構成の一例を示す図である。
図4は、実施形態にかかる牽引支援装置の機能構成の一例を示すブロック図である。
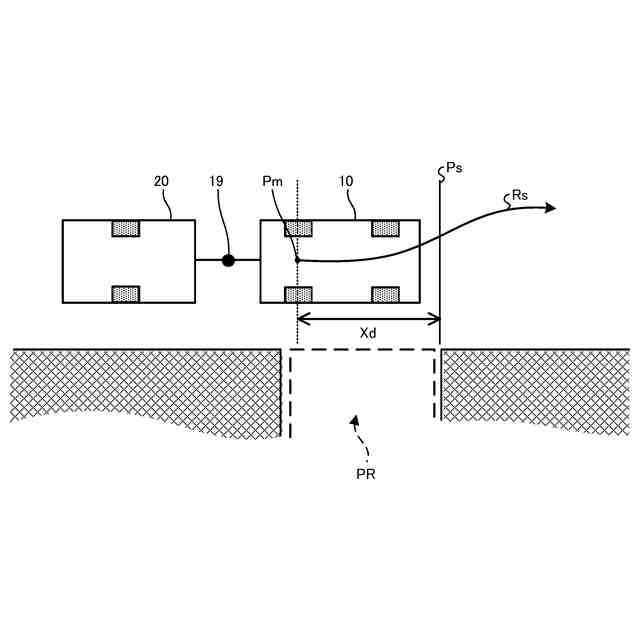
図5は、実施形態にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
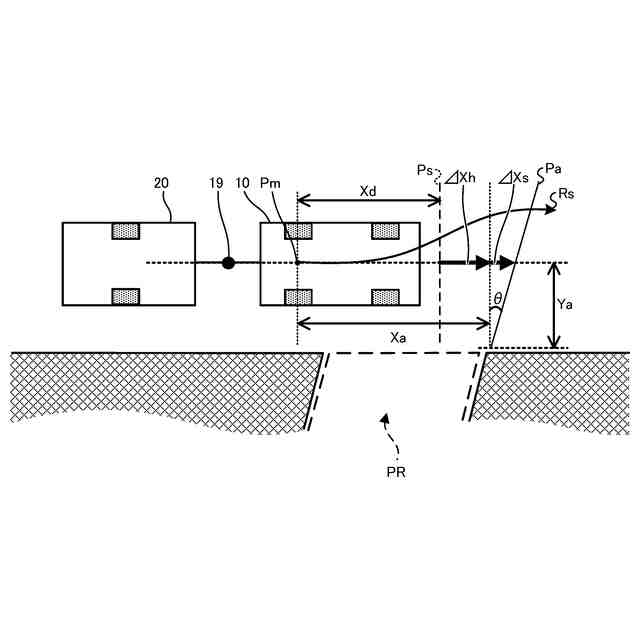
図6は、実施形態にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
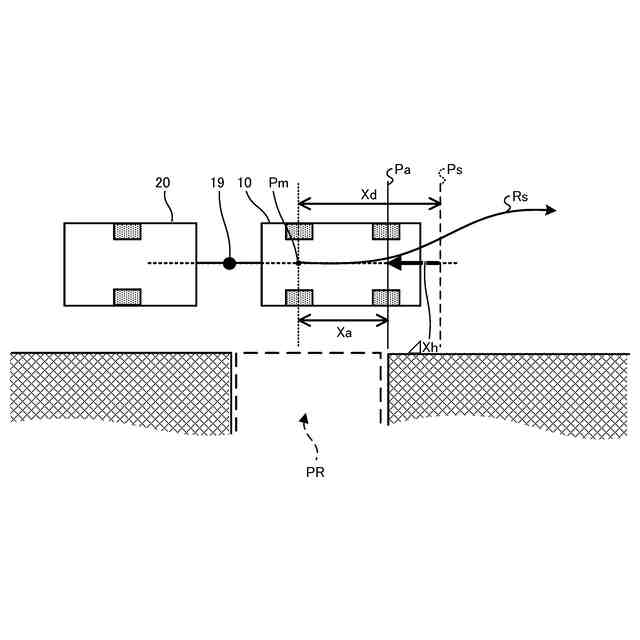
図7は、実施形態にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
図8は、実実施形態にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
図9は、実実施形態にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
図10は、実施形態にかかる牽引支援装置の後退駐車支援における動作の一例を示す説明図である。
図11は、実施形態にかかる牽引支援装置の後退駐車支援における動作の一例を示す説明図である。
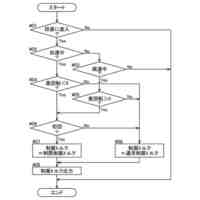
図12は、実施形態にかかる牽引支援装置による後退駐車のための目標経路の生成手順の一例を示すフロー図である。
図13は、実施形態の変形例にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
図14は、実施形態の変形例にかかる牽引支援装置が目標経路のうち前進経路を生成する動作の一例を示す説明図である。
図15は、実施形態の変形例にかかる牽引支援装置による後退駐車のための目標経路の生成手順の一例を示すフロー図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、本発明に係る牽引支援装置の実施形態を詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
4日前
株式会社アイシン
ロータ
8日前
株式会社アイシン
制御装置
9日前
株式会社アイシン
制御装置
9日前
株式会社アイシン
ステータ
8日前
株式会社アイシン
ステータ
8日前
株式会社アイシン
ステータ
8日前
株式会社アイシン
制御装置
9日前
株式会社アイシン
ステータ
8日前
株式会社アイシン
歯車機構
4日前
株式会社アイシン
駆動装置
9日前
株式会社アイシン
牽引支援装置
8日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
ドア支持装置
8日前
株式会社アイシン
車両制御装置
8日前
株式会社アイシン
折り畳み装置
8日前
株式会社アイシン
牽引支援装置
8日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
折り畳み装置
8日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
環境認識装置
8日前
株式会社アイシン
折り畳み装置
8日前
株式会社アイシン
ガス検出装置
8日前
株式会社アイシン
走行制御装置
8日前
株式会社アイシン
折り畳み装置
8日前
株式会社アイシン
車両用駆動装置
8日前
株式会社アイシン
車両用ドア装置
8日前
株式会社アイシン
車両用ドア装置
8日前
株式会社アイシン
車両用制御装置
9日前
株式会社アイシン
車両用制御装置
9日前
株式会社アイシン
車両用駆動装置
9日前
株式会社アイシン
ドアロック装置
2日前
株式会社アイシン
車両用制御装置
9日前
株式会社アイシン
サンルーフ装置
4日前
株式会社アイシン
露光制御システム
8日前
株式会社アイシン
燃料電池システム
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ