TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154783
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057973
出願日
2024-03-29
発明の名称
露光制御システム
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
H04N
23/72 20230101AFI20251002BHJP(電気通信技術)
要約
【課題】装置の製造工程の増大を防止しながら、高精度な露光制御を実現すること。
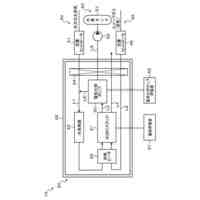
【解決手段】本発明に係る露光制御システムは、強化学習によって学習され、入力を、撮像部により撮像される画像の露光時間と、前記撮像部による撮像の際の明るさの調整を担うゲインと、前記画像の注目領域の平均輝度値と、目標輝度値と、前記注目領域の平均輝度値と目標輝度値との差と、を含むパラメータとし、出力を、露光時間とゲインとの乗算値とする学習済みモデルである露光制御モデルを用いて、前記撮像部で撮像された画像に基づく前記パラメータから、前記露光時間と前記ゲインとの乗算値を求める露光制御部、
を備える。
【選択図】図4
特許請求の範囲
【請求項1】
強化学習によって学習され、入力を、撮像部により撮像される画像の露光時間と、前記撮像部による撮像の際の明るさの調整を担うゲインと、前記画像の注目領域の平均輝度値と、目標輝度値と、前記注目領域の平均輝度値と目標輝度値との差と、を含むパラメータとし、出力を、露光時間とゲインとの乗算値とする学習済みモデルである露光制御モデルを用いて、前記撮像部で撮像された画像に基づく前記パラメータから、前記露光時間と前記ゲインとの乗算値を求める露光制御部、
を備える露光制御システム。
続きを表示(約 780 文字)
【請求項2】
前記露光制御モデルを学習する学習部、をさらに備え、
前記学習部は、
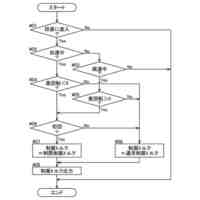
前記撮像部をシミュレートし、前記パラメータを入力し、前記注目領域の平均輝度値と、前記露光時間と、前記ゲインと、前記目標輝度値と、を出力し、前記露光制御モデルを再現したモデルである環境シミュレータと、
前記環境シミュレータから出力される、前記注目領域の平均輝度値と、前記目標輝度値と、を所定の報酬関数に入力して、前記報酬関数の出力が最大となる前記注目領域の平均輝度値と、前記目標輝度値と、を求める評価部と、
前記評価部による評価結果である前記注目領域の平均輝度値および前記目標輝度値と、を含む前記パラメータを、前記露光制御モデルに入力して、複数の、前記露光時間と前記ゲインとの乗算値と前記乗算値のスコアを推論値として出力する推論部と、
前記推論値として出力される複数の乗算値のスコアの中からスコアが最大となる前記露光時間と前記ゲインとを、行動として選択し、選択された前記露光時間と前記ゲインとを含む前記パラメータを、前記環境シミュレータに入力させる状態変化部と、
を備える請求項1に記載の露光制御システム。
【請求項3】
前記パラメータは、実際の環境における絶対的な明るさの尺度を示す絶対環境明るさ情報、を含む、
請求項2に記載の露光制御システム。
【請求項4】
前記環境シミュレータは、予め前記撮像部によって撮像された画像から、前記露光時間と前記ゲインと前記注目領域の平均輝度値とを対応付けた基礎データベースにおいて、入力された前記パラメータのうち、前記露光時間と前記ゲインとに対応付けられている前記注目領域の平均輝度値を取得する、
請求項2に記載の露光制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、露光制御システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、対象領域をカメラやイメージセンサ等の撮像部で撮像した撮像画像を用いて、対象領域内に写り込んでいる物体の検出や物体の姿勢や周囲の状況等を検出して、状況把握や制御等に利用する技術が知られている。
【0003】
例えば、特許文献1には、街灯等の外乱光によってドライバの状態検出の精度が低下することを回避するため、撮影装置側の自動補正した画像と、再度補正を施した画像とでドライバの状態の検出確率を向上する画像を生成し、ドライバの状態を検出する技術が開示されている。
【0004】
また、特許文献2には、機械学習モデルで、教師データをもとに高輝度の被写体の位置および輝度を推論し、当該推論値から補正パラメータを算出することで、太陽光が直接入射しているなど極端に明るい画像に対する適正な露光制御を実現する技術が開示されている。
【0005】
さらに、特許文献3には、監視カメラに人工知能を搭載し、人物、車両を検知し、画像データを学習することで、顔、車両の位置、明度、移動速度を推定して監視カメラのカメラパラメータを決定し、監視精度が劣化することを防止する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2019-046141号公報
特開2022-154658号公報
特開2021-118478号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来技術には以下のような問題がある。
特許文献1の技術では、取得した画像の輝度差分に基づいて補正を行っており、特許文献2の技術では、被写体の位置や輝度などの外部環境の変化を機械学習により推定しており、人工知能を物体検知に活用している。言い換えれば、これらの従来技術では、イメージセンサやカメラの種々の撮影環境に対する、制御パラメータ(例えば、露光時間、補正量等)を推論したり、算出しているわけではない。従って、これらの従来技術では、露光制御を高精度に行うことが困難である。
【0008】
また、特許文献2の技術では、教師あり学習により、高輝度の被写体の位置および輝度を推論し、特許文献3の技術では、人物、車両を検知し、画像データを学習することで、顔、車両の位置、明度、移動速度を推定している。このため、これらの従来技術では、画像データの処理や学習、加工には膨大な時間を要したり、入力に対する正解値のデータの組を大量に用意する必要があり、装置の製造工程が増大する。
【0009】
本発明は、上記に鑑みてなされたものであって、装置の製造工程が増大になることを防止しながら、高精度な露光制御を実現することができる露光制御システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る露光制御システムは、強化学習によって学習され、入力を、撮像部により撮像される画像の露光時間と、前記撮像部による撮像の際の明るさの調整を担うゲインと、前記画像の注目領域の平均輝度値と、目標輝度値と、前記注目領域の平均輝度値と目標輝度値との差と、を含むパラメータとし、出力を、露光時間とゲインとの乗算値とする学習済みモデルである露光制御モデルを用いて、前記撮像部で撮像された画像に基づく前記パラメータから、前記露光時間と前記ゲインとの乗算値を求める露光制御部、を備える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
3日前
株式会社アイシン
ロータ
9日前
株式会社アイシン
ロータ
7日前
株式会社アイシン
ステータ
7日前
株式会社アイシン
制御装置
8日前
株式会社アイシン
制御装置
8日前
株式会社アイシン
制御装置
8日前
株式会社アイシン
検知装置
8日前
株式会社アイシン
保護装置
8日前
株式会社アイシン
ステータ
7日前
株式会社アイシン
ステータ
7日前
株式会社アイシン
ステータ
7日前
株式会社アイシン
電子機器
8日前
株式会社アイシン
駆動装置
8日前
株式会社アイシン
歯車機構
3日前
株式会社アイシン
レーダ装置
8日前
株式会社アイシン
運転支援装置
7日前
株式会社アイシン
センサ固定具
9日前
株式会社アイシン
出庫支援装置
8日前
株式会社アイシン
電解システム
8日前
株式会社アイシン
乗員検知装置
8日前
株式会社アイシン
超音波センサ
9日前
株式会社アイシン
車両制御装置
8日前
株式会社アイシン
超音波センサ
9日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
折り畳み装置
7日前
株式会社アイシン
ガス検出装置
7日前
株式会社アイシン
衝撃吸収部材
8日前
株式会社アイシン
折り畳み装置
7日前
株式会社アイシン
案内システム
8日前
株式会社アイシン
環境認識装置
7日前
株式会社アイシン
運転支援装置
7日前
株式会社アイシン
折り畳み装置
7日前
株式会社アイシン
牽引支援装置
7日前
株式会社アイシン
牽引支援装置
7日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ