TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154588
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057677
出願日
2024-03-29
発明の名称
運転支援装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
G08G
1/16 20060101AFI20251002BHJP(信号)
要約
【課題】詳細な地図情報を有しない場合であっても地図情報と検出装置の検出結果を組み合わせることで適切な走行軌道を生成することを可能にした運転支援装置を提供する。
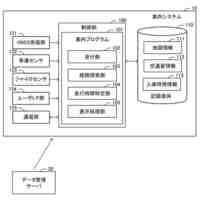
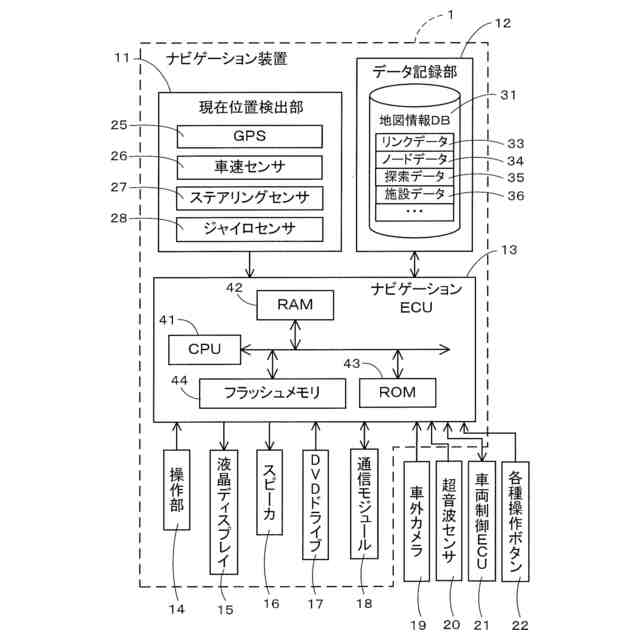
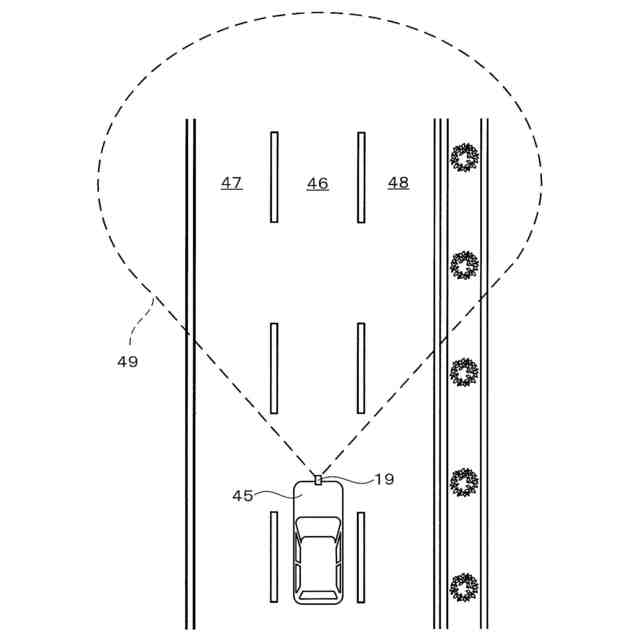
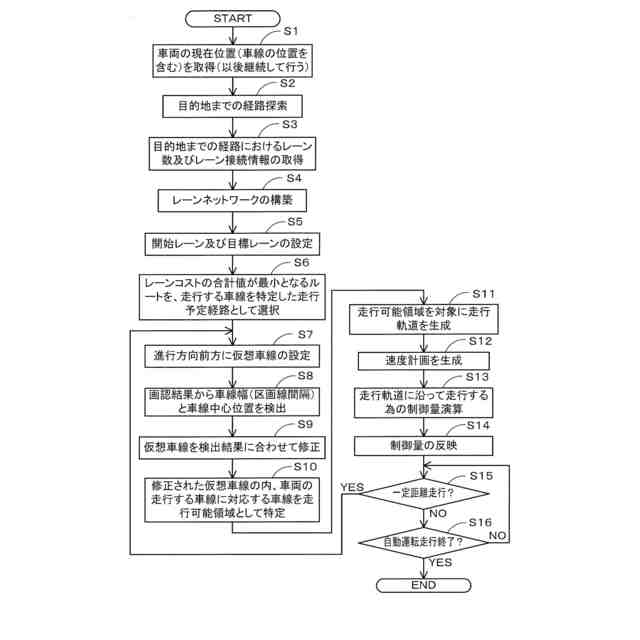
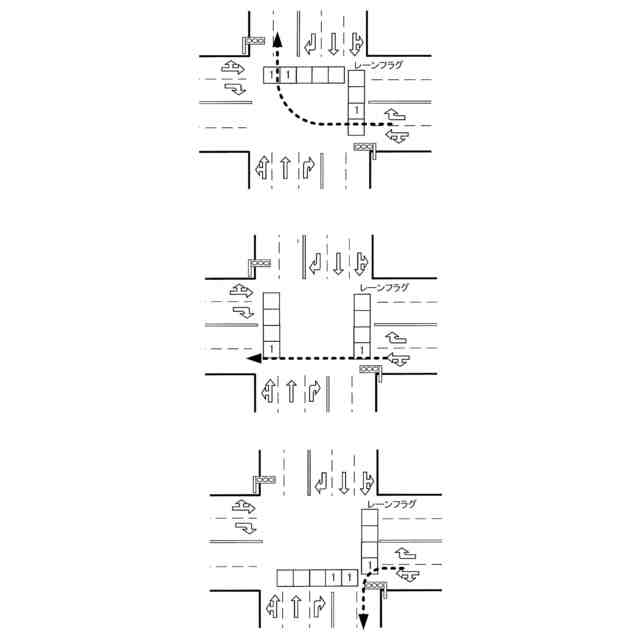
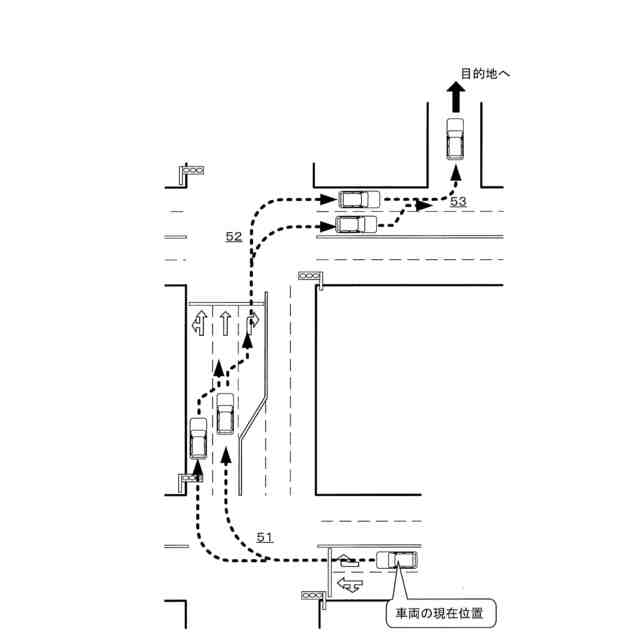
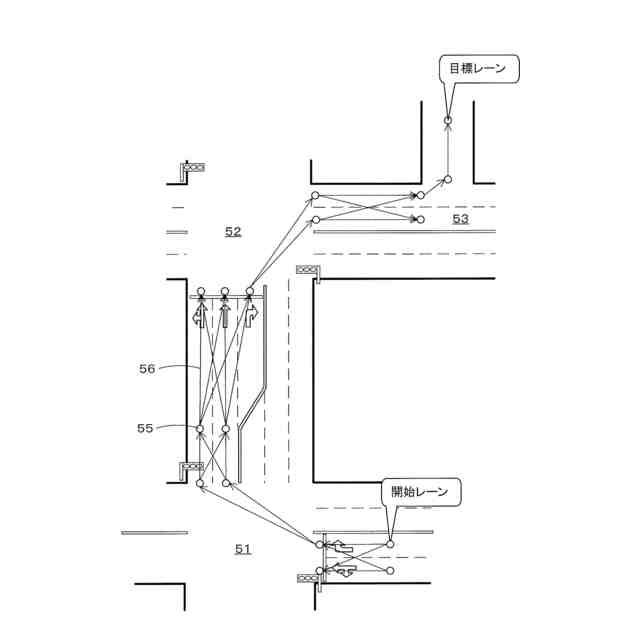
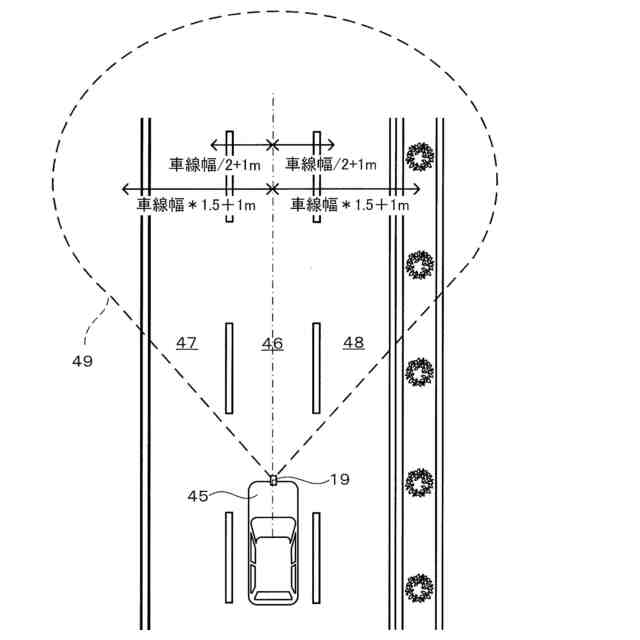
【解決手段】地図情報に含まれる経路案内用の道路リンク情報を用いることで、今後の車両の走行する車線を特定する情報を含む走行予定経路を取得する一方で、車外カメラ19を用いた車両周辺の画像認識結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、道路リンク情報と車両が走行する道路の幅方向を区分する情報とをマッチングさせることで、車両の進行方向前方において車両の走行する車線の領域を走行可能領域として特定し、走行予定経路に沿って走行可能領域内を走行する走行軌道を生成し、生成された走行軌道に基づいて車両の運転支援を行うように構成する。
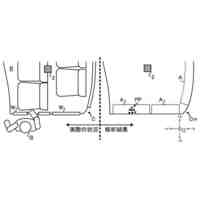
【選択図】図10
特許請求の範囲
【請求項1】
地図情報に含まれる経路案内用の道路リンク情報を用いることで、今後の車両の走行する車線を特定する情報を含む走行予定経路を取得する走行予定経路取得手段と、
車両の周辺状況を検出する検出装置の検出結果を取得する検出結果取得手段と、
前記検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、前記道路リンク情報と前記車両が走行する道路の幅方向を区分する情報とをマッチングさせることで、車両の進行方向前方において車両の走行する車線の領域を走行可能領域として特定する走行可能領域特定手段と、
前記走行予定経路に沿って前記走行可能領域内を走行する走行軌道を生成する走行軌道生成手段と、
前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有する運転支援装置。
続きを表示(約 910 文字)
【請求項2】
前記走行可能領域特定手段は、
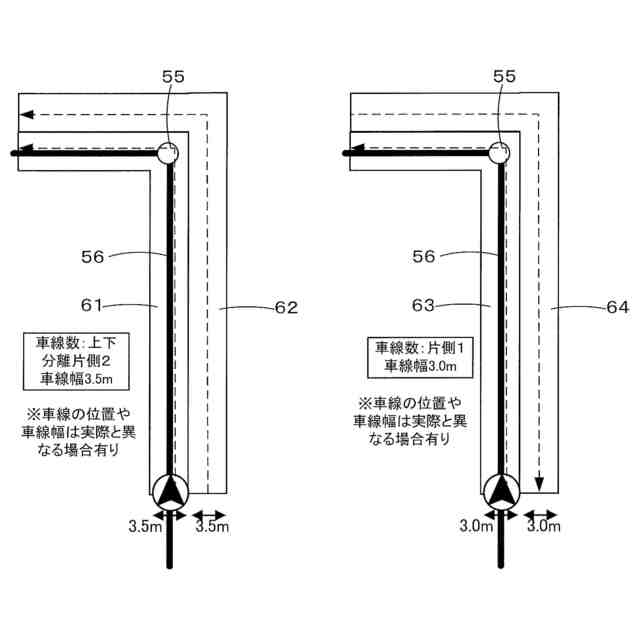
前記道路リンク情報に基づいて仮想車線を仮設定し、
前記検出装置の検出結果から得られた車線の中心位置に前記仮想車線の中心位置を合わせることで前記仮想車線を修正し、
修正した仮想車線の内、前記走行予定経路の車両の走行する車線に対応する仮想車線の領域を前記走行可能領域として特定する請求項1に記載の運転支援装置。
【請求項3】
前記走行可能領域特定手段は、
前記検出装置の検出結果から得られた車線の幅に前記仮想車線の幅を合わせることで前記仮想車線を修正する請求項2に記載の運転支援装置。
【請求項4】
前記走行可能領域特定手段は、
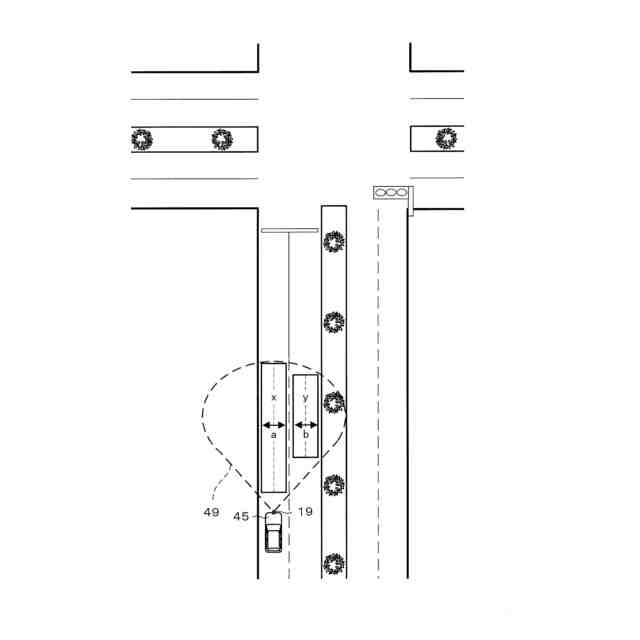
前記検出装置の検出範囲については前記マッチングの結果に基づいて前記走行可能領域を特定し、
前記検出装置の検出範囲外については検出範囲内で特定された前記走行可能領域と前記走行予定経路の形状から前記走行可能領域を推定して特定する請求項1乃至請求項3のいずれかに記載の運転支援装置。
【請求項5】
地図情報に含まれる経路案内用の道路リンク情報を用いることで、今後の車両の走行する車線を特定する情報を含む走行予定経路を取得する走行予定経路取得手段と、
車両の周辺状況を検出する検出装置の検出結果を取得する検出結果取得手段と、
前記検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、前記走行予定経路と前記車両が走行する道路の幅方向を区分する情報とをマッチングさせることで、車両の進行方向前方における道路内において車両が走行する走行軌道を生成する走行軌道生成手段と、
前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有する運転支援装置。
【請求項6】
前記走行軌道生成手段は、
前記検出装置の検出結果から得られた車線の中心位置に合わせて前記走行予定経路の位置を修正することで、前記走行軌道を生成する請求項5に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、車両の走行形態として、ユーザの運転操作に基づいて走行する手動走行以外に、ユーザの運転操作の一部又は全てを車両側で実行することにより、ユーザによる車両の運転を補助する自動運転支援システムについて新たに提案されている。自動運転支援システムでは、例えば、車両の現在位置、車両が走行する車線、周辺の他車両の位置を随時検出し、予め設定された経路に沿って走行するようにステアリング、駆動源、ブレーキ等の車両制御が自動で行われる。
【0003】
また、上記自動運転支援による走行を行う場合やその他の車両に対する各種運転支援を行う場合において、車両の走行予定経路や地図情報等に基づいて走行が推奨される走行軌道を車両が走行する道路上に予め生成することが行われている。ここで、道路において車両が走行する具体的な軌道まで特定した車両の走行軌道を生成する為には、道路においてどのように区画線や車線が配置され、車両が走行可能な領域がどこからどこまでなのかを把握する必要があり、それらを特定した詳細な地図情報が必要となる。例えば特許第7347522号公報では、車線単位の道路形状や曲率、車線幅、区画線等の情報を含む高精度地図情報を用いて車両の走行が推奨される静的走行軌道を生成することが開示されている。また、カメラやセンサによる対象物の検出範囲を対象にして検出結果を反映した動的走行軌道についても生成し、静的走行軌道を生成された動的走行軌道に基づいて修正することについても開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7347522号公報(段落0030、0053、0055-0058)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、上記特許文献1では道路の路面に描かれた区画線に関する詳細な情報を含む高精度地図情報に基づいて走行軌道を生成することが開示されているが、全国の道路を対象にしてそのような詳細な地図情報を正確にデータベース化することは現実的に困難であった。また、カメラやセンサによる検出結果に基づいて走行軌道を生成することも開示されているが、カメラやセンサで得られた情報のみから走行軌道を生成することとすると、走行軌道の生成に必要な情報が必ず取得できる保証がなく、特に大型の道路では検出範囲外となる情報が多いことから適切な走行軌道が生成できない場合もある。一方で、上記特許文献1には高精度地図情報に基づいて生成された静的走行軌道に、カメラやセンサで得られた情報に基づいて生成された動的走行軌道を組み合わせる例についても開示されているが、その場合であっても車両の走行軌道はあくまで静的走行軌道がベースとなっており、走行軌道を生成する為には少なくとも区画線に関する詳細な情報が必要となっていた。
【0006】
本発明は前記従来における問題点を解消するためになされたものであり、道路の路面に描かれた区画線に関する詳細な情報を有しなくとも、地図情報と検出装置の検出結果を組み合わせることで適切な走行軌道を生成することを可能にした運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため本発明に係る第1の運転支援装置は、地図情報に含まれる経路案内用の道路リンク情報を用いることで、今後の車両の走行する車線を特定する情報を含む走行予定経路を取得する走行予定経路取得手段と、車両の周辺状況を検出する検出装置の検出結果を取得する検出結果取得手段と、前記検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、前記道路リンク情報と前記車両が走行する道路の幅方向を区分する情報とをマッチングさせることで、車両の進行方向前方において車両の走行する車線の領域を走行可能領域として特定する走行可能領域特定手段と、前記走行予定経路に沿って前記走行可能領域内を走行する走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有する。
【0008】
また、本発明に係る第2の運転支援装置は、地図情報に含まれる経路案内用の道路リンク情報を用いることで、今後の車両の走行する車線を特定する情報を含む走行予定経路を取得する走行予定経路取得手段と、車両の周辺状況を検出する検出装置の検出結果を取得する検出結果取得手段と、前記検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、前記走行予定経路と前記車両が走行する道路の幅方向を区分する情報とをマッチングさせることで、車両の進行方向前方における道路内において車両が走行する走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有する。
【発明の効果】
【0009】
前記構成を有する本発明に係る第1の運転支援装置によれば、検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、道路リンク情報をそれらの検出結果にマッチングさせることで、区画線に関する詳細な情報を有しなくとも車両の進行方向前方における走行可能領域を正確に特定可能となる。その結果、走行可能領域に合わせた車両の適切な走行軌道を生成することが可能であり、適切な運転支援を実施することが可能となる。
【0010】
前記構成を有する本発明に係る第2の運転支援装置によれば、検出装置の検出結果に基づいて車両が走行する道路の幅方向を区分する情報を検出するとともに、走行予定経路をそれらの検出結果にマッチングさせることで、区画線に関する詳細な情報を有しなくとも適切な走行軌道を生成することが可能となる。その結果、走行軌道に基づく適切な運転支援を実施することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
1日前
株式会社アイシン
ロータ
3日前
株式会社アイシン
空気袋
12日前
株式会社アイシン
ステータ
1日前
株式会社アイシン
検知装置
2日前
株式会社アイシン
電子機器
2日前
株式会社アイシン
駆動装置
2日前
株式会社アイシン
制御装置
2日前
株式会社アイシン
制御装置
2日前
株式会社アイシン
制御装置
2日前
株式会社アイシン
回転電機
4日前
株式会社アイシン
回転電機
4日前
株式会社アイシン
制御装置
8日前
株式会社アイシン
車体構造
8日前
株式会社アイシン
回転電機
8日前
株式会社アイシン
ステータ
1日前
株式会社アイシン
ステータ
1日前
株式会社アイシン
ステータ
1日前
株式会社アイシン
駆動装置
10日前
株式会社アイシン
保護装置
2日前
株式会社アイシン
温度調節器
22日前
株式会社アイシン
温度調節器
22日前
株式会社アイシン
温度調節器
12日前
株式会社アイシン
鋳ぐるみ品
12日前
株式会社アイシン
温度調節器
8日前
株式会社アイシン
レーダ装置
2日前
株式会社アイシン
運転支援装置
2日前
株式会社アイシン
運転支援装置
1か月前
株式会社アイシン
衝撃吸収部材
2日前
株式会社アイシン
車両下部構造
1か月前
株式会社アイシン
案内システム
2日前
株式会社アイシン
電解システム
3日前
株式会社アイシン
乗員検知装置
23日前
株式会社アイシン
超音波センサ
3日前
株式会社アイシン
超音波センサ
3日前
株式会社アイシン
センサ固定具
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ