TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149247
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049777
出願日
2024-03-26
発明の名称
手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20251001BHJP(医学または獣医学;衛生学)
要約
【課題】ロボットアームがどのような姿勢でも、容易に、かつ短時間で手術用器具を交換できる手術支援ロボットを提供する。
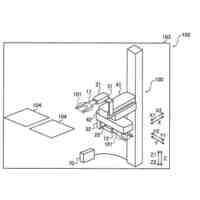
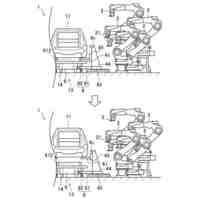
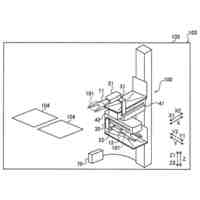
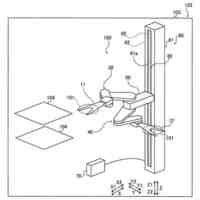
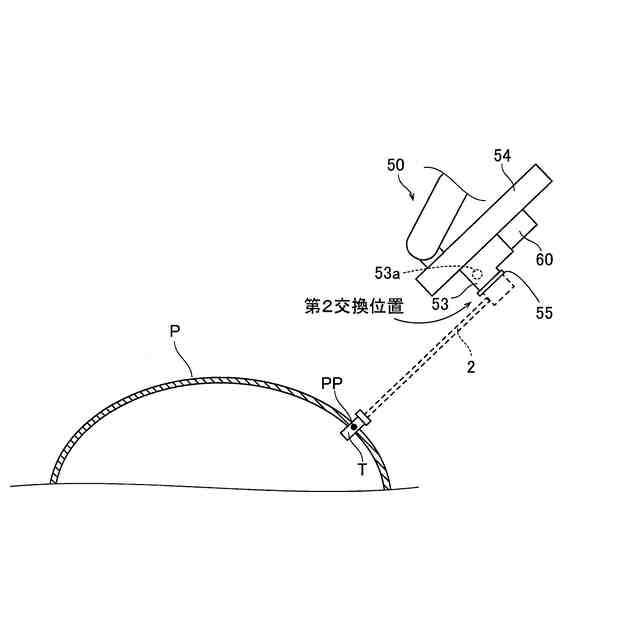
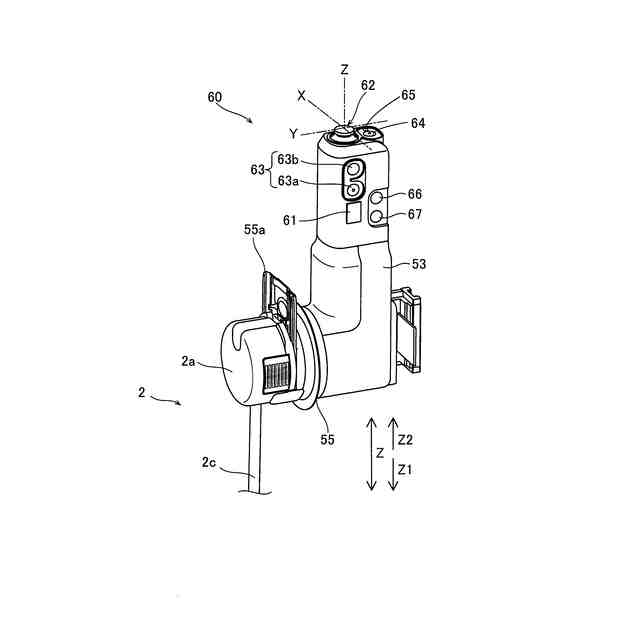
【解決手段】手術支援ロボット100は、インストゥルメント2が脱着されるホルダ55を含むロボットアーム50と、ロボットアーム50を操作するジョイスティック62を含み、ロボットアーム50に配置されたアーム操作部60と、ホルダ55に配置され、インストゥルメント2のホルダ55への脱着を検知する検知部53aと、インストゥルメント2が取り外されたことを検知部53aが検知した場合に、ホルダ55を第1交換位置に移動させるように構成された第1制御装置310と、を備える。第1制御装置310は、インストゥルメント2を取り外した時のインストゥルメント2の先端位置とジョイスティック62への入力とに基づいて、第2交換位置までホルダ55を移動させるように制御する。
【選択図】図23
特許請求の範囲
【請求項1】
第1インストゥルメントが脱着されるホルダを含むロボットアームと、
前記ロボットアームを操作する操作具を含み、前記ロボットアームに配置されたアーム操作部と、
前記ホルダに配置され、前記第1インストゥルメントの前記ホルダへの脱着を検知する検知部と、
前記第1インストゥルメントが取り外されたことを前記検知部が検知した場合に、前記ホルダを第1交換位置に移動させるように構成された制御装置と、を備え、
前記制御装置は、前記操作具への入力に基づいて、前記第1交換位置から第2交換位置まで前記ホルダを移動させるように制御する、手術支援ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記アーム操作部は、操作者により操作される入力要素をさらに含み、
前記制御装置は、前記第2交換位置の前記ホルダに第2インストゥルメントが装着された状態で前記入力要素が操作されたとき、前記ホルダを前記第2交換位置から前記第1交換位置に移動させるように前記ロボットアームの動作を制御する、請求項1に記載の手術支援ロボット。
【請求項3】
ピボット位置の情報が記憶される記憶部を備え、
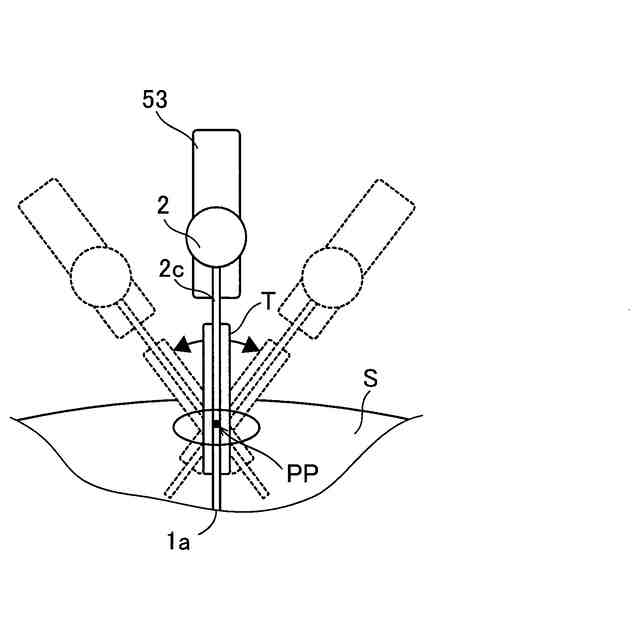
前記制御装置は、前記第2インストゥルメントを前記ホルダに取り付けた状態で前記入力要素が操作されることにより、前記ピボット位置および前記第1インストゥルメントが取り外された時の前記第1インストゥルメントの先端位置に基づいて前記ロボットアームの動作を制御する、請求項2に記載の手術支援ロボット。
【請求項4】
前記制御装置は、前記入力要素が操作されたことに基づいて、前記ピボット位置と前記ホルダとの距離を維持するように前記ロボットアームの動作を制御する、請求項3に記載の手術支援ロボット。
【請求項5】
前記制御装置は、前記第2インストゥルメントを取り付けた状態において、前記第2インストゥルメントの姿勢が、前記記憶された第1インストゥルメントの姿勢に一致するまで前記操作具の操作を無効にする制御を行う、請求項2に記載の手術支援ロボット。
【請求項6】
前記入力要素は、前記アーム操作部に配置されたイネーブルスイッチである、請求項2に記載の手術支援ロボット。
【請求項7】
ピボット位置の情報が記憶される記憶部を備え、
前記制御装置は、前記第1インストゥルメントが取り外されて前記操作具に入力された操作に基づいて前記ロボットアームを動作させる際に、前記ピボット位置と前記ホルダとの距離を維持するように前記ロボットアームの動作を制御する、請求項1に記載の手術支援ロボット。
【請求項8】
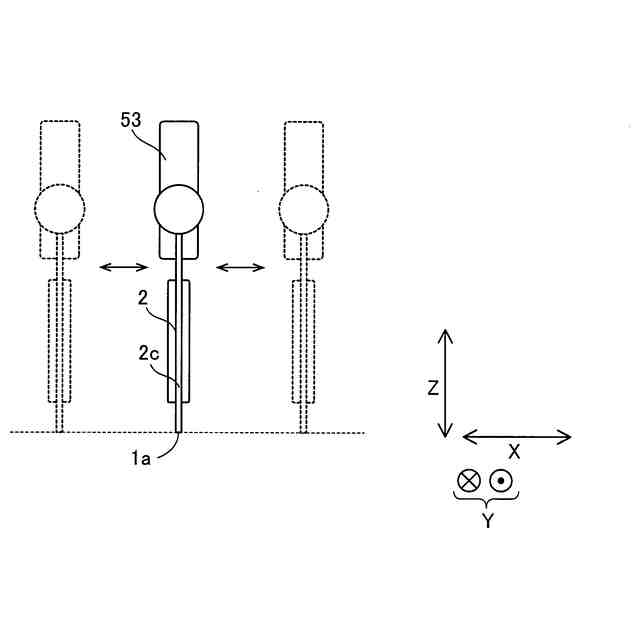
前記ロボットアームは、先端に直動動作機構部と、
前記直動動作機構部に対して直動動作可能に取り付けられた可動側要素と、を備え、
前記ホルダと、前記アーム操作部は各々前記可動側要素と結合している、請求項1に記載の手術支援ロボット。
【請求項9】
前記制御装置は、前記第1インストゥルメントが取り外されたことを前記検知部が検知した場合、前記直動動作機構部を、前記ホルダがピボット位置に対して一定の距離離れた位置まで動作させる、請求項8に記載の手術支援ロボット。
【請求項10】
前記操作具は、ジョイスティックであり、
前記制御装置は、前記ジョイスティックに入力された操作に基づいて前記ロボットアームを制御する、請求項1に記載の手術支援ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
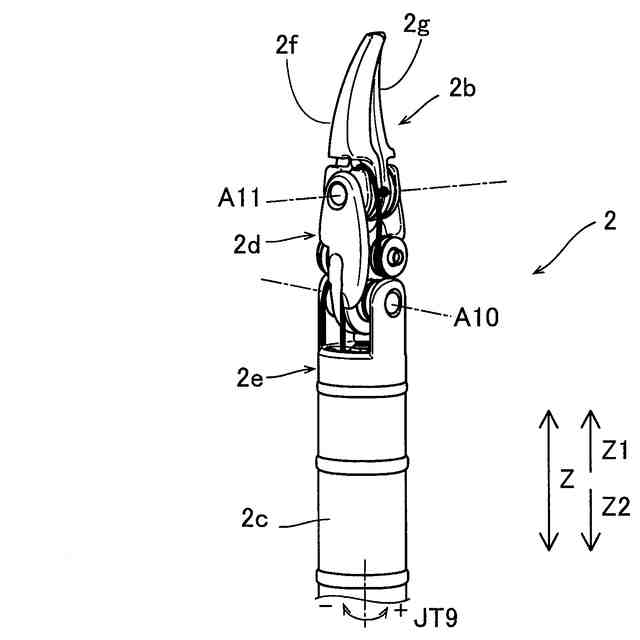
この開示は、手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法に関し、特に、インストゥルメントを取り付けるホルダが先端に配置された手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、インストゥルメントを取り付けるホルダが先端に配置された手術支援ロボットが知られている(例えば、特許文献1参照)。
【0003】
上記特許文献1には、操作者側装置と、複数のロボットアームを含む患者側装置と、制御装置と、手術用器具とを備えるロボットシステム(手術支援ロボット)が開示されている。手術用器具は、ロボットアームに取り付けられ、手術を行うように構成されている。また、手術中に手術用器具を交換する方法が開示されている。ロボットアームには、直動動作機構が設けられている。交換後のインストゥルメントが交換前のインストゥルメントと同じ位置に移動するように、制御装置により直動動作機構が制御される。
【先行技術文献】
【特許文献】
【0004】
米国特許第6645196号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、手術中に手術用器具を交換する際、ロボットアームは、術式や手術の状況によって様々な姿勢を取り得る。交換時のロボットアームの姿勢によっては、手術担当者が手術用器具を交換しづらいとともに、交換作業に時間を要する。そのため、容易に、かつ短時間でインストゥルメントを交換できる手術支援ロボットが望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームがどのような姿勢でも、容易に、かつ短時間で手術用器具を交換できる手術支援ロボットを提供することである。
【課題を解決するための手段】
【0007】
本開示の第1の局面による手術支援ロボットは、第1インストゥルメントが脱着されるホルダを含むロボットアームと、ロボットアームを操作する操作具を含み、ロボットアームに配置されたアーム操作部と、ホルダに配置され、第1インストゥルメントのホルダへの脱着を検知する検知部と、第1インストゥルメントが取り外されたことを検知部が検知した場合に、第1交換位置に移動させるように構成された制御装置と、を備え、制御装置は、操作具への入力に基づいて、第1交換位置から第2交換位置までホルダを移動させるように制御する。
【0008】
本開示の第1の局面による手術支援ロボットでは、制御装置は、第1インストゥルメントが取り外されたことを検知部が検知した場合にホルダを第1交換位置に移動させるとともに、操作具への入力に基づいて、第1交換位置から第2交換位置までホルダを移動させるように制御する。これにより、手術中に第1インストゥルメントを交換するため第1インストゥルメントが手術従事者により取り外されると、ロボットアームに配置された操作具でロボットアームが操作可能になる。これにより、手術従事者は、ロボットアームを第2インストゥルメントが交換しやすい姿勢に動かすことが可能となる。その結果、手術従事者は容易に、かつ短時間で第1インストゥルメントを交換できる。
【0009】
本開示の第2の局面による手術支援システムは、手術支援ロボットと、手術支援ロボットを操作する操作装置とを備え、手術支援ロボットは、第1インストゥルメントが脱着されるホルダを含むロボットアームと、ロボットアームを操作する操作具を含み、ロボットアームに配置されたアーム操作部と、ホルダに配置され、第1インストゥルメントのホルダへの脱着を検知する検知部と、第1インストゥルメントが取り外されたことを検知部が検知した場合に、ホルダを第1交換位置に移動させるように構成された制御装置と、を備え、制御装置は、操作具への入力に基づいて、第1交換位置から第2交換位置までホルダを移動させるように制御する。
【0010】
本開示の第2の局面による手術支援システムでは、制御装置は、第1インストゥルメントが取り外されたことを検知部が検知した場合にホルダを第1交換位置に移動させるとともに、操作具への入力に基づいて、第1交換位置から第2交換位置までホルダを移動させるように制御する。これにより、手術中に各々のロボットアームの第1インストゥルメントを交換するため第1インストゥルメントが手術従事者により取り外されると、各々のロボットアームに配置された操作具でロボットアームが操作可能になる。これにより、手術従事者はロボットアームをインストゥルメントが交換しやすい姿勢に動かすことが可能となる。その結果、手術従事者は、容易に、かつ短時間でインストゥルメントを交換できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
1か月前
川崎重工業株式会社
ロボット
6日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ダクト継手
6日前
川崎重工業株式会社
監視システム
今日
川崎重工業株式会社
排ガス採取器
1か月前
川崎重工業株式会社
配管の支持構造
今日
川崎重工業株式会社
ゼオライト触媒
8日前
川崎重工業株式会社
遠心ターボ機械
8日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
エンドエフェクタ
20日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
位置情報システム
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
ロボットシステム
今日
川崎重工業株式会社
クローズドインペラ
1か月前
川崎重工業株式会社
締結方法及び締結装置
6日前
川崎重工業株式会社
液化ガス導入システム
1か月前
川崎重工業株式会社
極低温流体用配管設備
1日前
川崎重工業株式会社
正極活物質の再生方法
1か月前
川崎重工業株式会社
環状フレームの成形方法
10日前
川崎重工業株式会社
ロボットの診断システム
今日
株式会社キッツ
逆流防止弁
今日
川崎重工業株式会社
ロボットシステム及びロボット
1か月前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
6日前
川崎重工業株式会社
配管の接続構造および配管システム
2日前
川崎重工業株式会社
ロボットシステム及びその動作方法
1日前
川崎重工業株式会社
電力供給システムおよびその制御方法
1か月前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
20日前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ