TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025155071
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024058404
出願日
2024-03-31
発明の名称
遠隔機械操縦装置及びプログラム並びに遠隔機械操縦システム
出願人
国立大学法人京都大学
代理人
個人
主分類
B25J
3/00 20060101AFI20251006BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】遠隔地に設置された機械の動き映像をモニタリングしながら、当該機械を違和感なく操縦できる遠隔機械操縦装置及びプログラム並びに遠隔機械操縦システムを提供する。
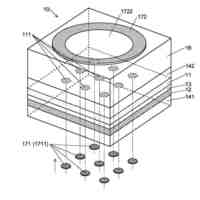
【解決手段】 遠隔機械操縦装置10は、オペレータがモニタリング映像を見ながら遠隔地にある作業機械装置を操縦するためのものであり、オペレータに操作された操作部11から得られる操縦情報と、オペレータの操作に関連する所定情報と、未来予測モデルと、に基づいて、操作部11における操作時刻を基準にして、作業機械装置80との間の伝送遅延時間に相当する時間経過後の未来の操縦情報である未来操縦情報を予測する未来操縦情報予測部25と、未来操縦情報予測部25で予測された未来操縦情報を作業機械装置へ送信する送信部26と、を備えている。
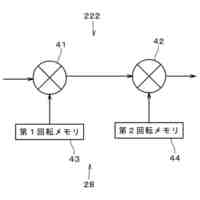
【選択図】図2
特許請求の範囲
【請求項1】
オペレータがモニタリング映像を見ながら遠隔地にある作業機械装置を操縦するための遠隔機械操縦装置であって、
前記オペレータに操作された操作部から得られる操縦情報と、前記オペレータの操作に関連する所定情報と、未来予測モデルと、に基づいて、前記操作部における操作時刻を基準にして、前記作業機械装置との間の伝送遅延時間に相当する時間経過後の未来の操縦情報である未来操縦情報を予測する未来操縦情報予測部と、
前記未来操縦情報予測部で予測された前記未来操縦情報を前記作業機械装置へ送信する送信部と、
を備えた遠隔機械操縦装置。
続きを表示(約 1,200 文字)
【請求項2】
前記未来予測モデルは、教師データとして、前記操作時刻及び前記操作時刻から前記伝送遅延時間後の時刻における前記操縦情報、並びに前記操作時刻より過去の所定範囲内の前記所定情報の時系列データを用いて学習された機械学習モデルである
請求項1に記載の遠隔機械操縦装置。
【請求項3】
前記操作部への操作力を取得する操作力取得部を更に備え、
前記未来予測モデルは、前記所定情報の時系列データとして、前記操作力の時系列データを用いて学習された前記機械学習モデルであり、
前記未来操縦情報予測部は、前記所定情報として、前記操作力取得部で取得された前記操作力を用いて前記未来操縦情報を予測する
請求項2に記載の遠隔機械操縦装置。
【請求項4】
前記オペレータの前記操作に関連する腕の筋電位情報を取得する筋電位情報取得部を更に備え、
前記未来予測モデルは、前記所定情報の時系列データとして、前記筋電位情報の時系列データを更に用いて学習された前記機械学習モデルであり、
前記未来操縦情報予測部は、前記所定情報として、前記筋電位情報取得部で取得された前記筋電位情報を更に用いて前記未来操縦情報を予測する
請求項3に記載の遠隔機械操縦装置。
【請求項5】
前記操作部から得られた前記操作時刻の前記操縦情報と、前記未来操縦情報予測部で過去に予測された前記操作時刻に対応する前記未来操縦情報と、に基づいて、前記未来予測モデルを更新する未来予測モデル更新部
を更に備えた請求項2に記載の遠隔機械操縦装置。
【請求項6】
前記伝送遅延時間を測定する伝送遅延時間測定部を更に備え、
前記未来操縦情報予測部は、前記伝送遅延時間測定部で測定された前記伝送遅延時間に相当する時間経過後の前記未来操縦情報を予測する
請求項1に記載の遠隔機械操縦装置。
【請求項7】
前記伝送遅延時間測定部は、前記作業機械装置へ前記未来操縦情報を送信し、前記作業機械装置から前記モニタリング映像が戻るまでの往復の伝送遅延時間を前記伝送遅延時間として測定する
請求項6に記載の遠隔機械操縦装置。
【請求項8】
前記オペレータの操作に応じて前記伝送遅延時間を調整する伝送遅延時間調整部
を更に備えた請求項6に記載の遠隔機械操縦装置。
【請求項9】
コンピュータを請求項1に記載の遠隔機械操縦装置の各部として機能させるためのプログラム。
【請求項10】
請求項1に記載された遠隔機械操縦装置と、
前記遠隔機械操縦装置から送信された前記未来操縦情報を受信して、前記モニタリング映像を前記遠隔機械操縦装置へ送信する前記作業機械装置と、
を備えた遠隔機械操縦システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔機械操縦装置及びプログラム並びに遠隔機械操縦システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、オペレータがネットワークを介して遠隔地に設置された機械を遠隔操縦する遠隔機械操縦システムが知られている。具体的には、オペレータは、当該機械の動き映像をモニタリングしながら、手元の操作レバーを操作することで当該機械を操縦する。このような遠隔機械操縦システムでは、モニタリング映像と実際のレバー操作との間において、オペレータに、ネットワークの伝送遅延に起因したずれを感じさせてしまう問題がある。
【0003】
そこで、操作者(オペレータ)が操作する操作端末(操作レバー)と実ロボット(機械)との間の通信遅延が操作者の操作に与える影響を抑制する技術が開示されている(特許文献1参照)。
【0004】
特許文献1の技術は、遠隔地で通信遅延分だけ遅れて動作する実ロボットの動き映像をモニタリングする際に、当該実ロボットとその周辺物とをそれぞれモデル化し、それらのモデルに基づいて通信遅延を補償した予測映像を合成し、それをモニタリング映像として表示する。
【先行技術文献】
【特許文献】
【0005】
特開2020-26028号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の技術では、表示されるモニタリング映像は、その予測合成のベースとなるモデルの精度に大きく依存する。一方、当該実ロボットの周辺物は特定の対象物とは限らないことから、当該周辺物を常に正確にモデル化することは困難であり、その結果、適切なモニタリング映像を表示できない問題がある。
【0007】
一方、本願の一部の発明者らによって、オペレータの身体に装着した筋電センサから筋電位情報を取得し、その筋電位情報を用いて遠隔地に配置した機械の操縦情報を予測する技術が提案されている(特願2022-154191号)。
【0008】
上記技術では、オペレータは筋電位情報を取得するための筋電センサを身体に装着する必要があり、オペレータに煩わしさを感じさせてしまう問題がある。
【0009】
本発明は、このような実情を鑑みて提案されたものであり、遠隔地に設置された機械の動き映像をモニタリングしながら、当該機械を違和感なく操縦できる遠隔機械操縦装置及びプログラム並びに遠隔機械操縦システムを提供する。
【課題を解決するための手段】
【0010】
本発明に係る遠隔機械操縦装置は、オペレータがモニタリング映像を見ながら遠隔地にある作業機械装置を操縦するための遠隔機械操縦装置であって、前記オペレータに操作された操作部から得られる操縦情報と、前記オペレータの操作に関連する所定情報と、未来予測モデルと、に基づいて、前記操作部における操作時刻を基準にして、前記作業機械装置との間の伝送遅延時間に相当する時間経過後の未来の操縦情報である未来操縦情報を予測する未来操縦情報予測部と、前記未来操縦情報予測部で予測された前記未来操縦情報を前記作業機械装置へ送信する送信部と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人京都大学
抗がん剤
1か月前
国立大学法人京都大学
バイオセンサ
1か月前
国立大学法人京都大学
マグネトロン
5か月前
国立大学法人京都大学
多環芳香族化合物
1か月前
国立大学法人京都大学
多環芳香族化合物
1か月前
国立大学法人京都大学
多環芳香族化合物
1か月前
国立大学法人京都大学
細胞質送達ペプチド
6か月前
国立大学法人京都大学
凍結細胞の製造方法
3か月前
国立大学法人京都大学
高さ調整可能な展示台
4か月前
国立大学法人京都大学
剪断流を発生させる器具
6か月前
個人
肝疾患の検出方法
4か月前
国立大学法人京都大学
白血病の髄外浸潤マーカー
15日前
国立大学法人京都大学
ブロック共重合体の製造方法
3か月前
国立大学法人京都大学
電気伝導体及びその設計方法
2か月前
国立大学法人京都大学
2次元フォトニック結晶レーザ
1か月前
国立大学法人京都大学
データ読み出し方法および装置
4か月前
国立大学法人京都大学
2次元フォトニック結晶レーザ
1か月前
国立大学法人京都大学
陽極およびアルカリ水電解装置
3か月前
国立大学法人京都大学
神経変性疾患の予防または治療薬
3か月前
国立大学法人京都大学
全固体イオン選択性電極用組成物
3か月前
国立大学法人京都大学
配座固定アミロイドβ42誘導体
2か月前
DMG森精機株式会社
表面発光装置
1か月前
国立大学法人京都大学
二酸化炭素を回収する方法および装置
2か月前
国立大学法人京都大学
フーリエ変換装置および無線通信装置
3か月前
国立大学法人京都大学
フルオロリン酸イオンを分離する方法
1か月前
国立大学法人京都大学
BRG1遺伝子を標的とした膵癌治療剤
1か月前
株式会社構造計画研究所
領域変形装置
2か月前
日本電信電話株式会社
細胞培養デバイス
4か月前
日本電信電話株式会社
細胞培養デバイス
4か月前
日本電信電話株式会社
細胞培養デバイス
4か月前
日本電信電話株式会社
細胞培養デバイス
4か月前
多摩川精機株式会社
圧電型角速度センサ
5か月前
スタンレー電気株式会社
面発光レーザ装置
2か月前
国立大学法人京都大学
含窒素スピロ環化合物の製法及びその化合物
5か月前
東ソー株式会社
がんモデル動物の作製方法
2か月前
スミダ電機株式会社
測定装置および測定方法
10日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ