TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157722
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2024059912
出願日
2024-04-03
発明の名称
画像処理装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
,
日本電気株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G06T
7/60 20170101AFI20251008BHJP(計算;計数)
要約
【課題】画像全体の特徴点数を調整しつつ、効率的に間引き処理を実行できる技術を提供する。
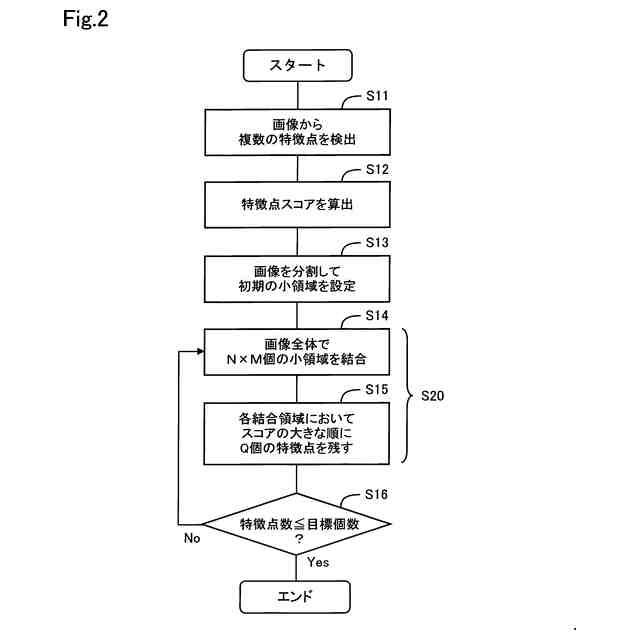
【解決手段】画像処理装置100は、複数の特徴点を検出する特徴点検出部110と、複数の特徴点に関する特徴点スコアを算出するスコア算出部120と、特徴点スコアを用いて複数の特徴点の間引きを実行する間引き処理部130と、を備える。間引き処理部は、(a)画像を初期の複数の小領域に分割する処理と、(b)互いに隣接するN×M個の小領域を結合することによって、複数の結合領域を生成する処理と、(c)複数の結合領域の各結合領域に存在する特徴点のうち、特徴点スコアの大きな順にQ個の特徴点を選択して他の特徴点を結合領域から削除する処理と、(d)終了条件が成立するまで、複数の結合領域を新たな複数の小領域として処理(b),(c)の間引きステップを繰り返す処理と、を実行するように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
画像処理装置(100)であって、
画像から複数の特徴点を検出する特徴点検出部(110)と、
前記複数の特徴点のそれぞれに関する特徴点スコアを算出するスコア算出部(120)と、
前記特徴点スコアを用いて前記複数の特徴点の間引きを実行する間引き処理部(130)と、
を備え、
前記間引き処理部は、
(a)前記画像を初期の複数の小領域に分割する処理と、
(b)N,Mの一方を1以上の整数とし、他方を2以上の整数としたとき、互いに隣接するN×M個の前記小領域を結合することによって、複数の結合領域を生成する処理と、
(c)Qを1以上の整数としたとき、前記複数の結合領域の各結合領域に存在する前記特徴点のうち、前記特徴点スコアの大きな順にQ個の前記特徴点を選択して他の前記特徴点を前記結合領域から削除する処理と、
(d)予め設定された終了条件が成立するまで、前記複数の結合領域を新たな複数の小領域として前記処理(b),(c)の間引きステップを繰り返す処理と、
を実行するように構成されている、画像処理装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の画像処理装置であって、
前記処理(a)は、前記画像の幅方向の分割数Dwと前記画像の高さ方向の分割数Dhを用いて、前記画像の高さと幅をそれぞれ分割することによって、前記初期の複数の小領域を設定する処理を含み、
j,kを1以上の整数とし、pを2以上の整数としたとき、Dw=j×N
p
,Dh=k×M
p
に設定される、画像処理装置。
【請求項3】
請求項2に記載の画像処理装置であって、
前記整数N,Mはそれぞれ2であり、前記整数Qは1であり、
Dw=j×2
p
,Dh=k×2
p
である、画像処理装置。
【請求項4】
請求項3に記載の画像処理装置であって、
前記画像の幅をW画素とし、前記画像の高さをH画素としたとき、
前記整数pは、2
n
<Wとなる最大の整数nと、2
m
<Hとなる最大の整数mと、を含む複数の候補値のうちの最小値であり、
前記整数jは、j×2
p
<Wとなる最大の整数であり,前記整数kは、k×2
p
<Hとなる最大の整数である、画像処理装置。
【請求項5】
請求項3に記載の画像処理装置であって、
前記画像の幅をW画素とし、前記画像の高さをH画素としたとき、
前記整数pは、2
n
≦Wとなる最大の整数nと、2
m
≦Hとなる最大の整数mと、を含む複数の候補値のうちの最小値であり、
前記整数jは、j×2
p
≦Wとなる最大の整数であり,前記整数kは、k×2
p
≦Hとなる最大の整数である、画像処理装置。
【請求項6】
請求項4又は5に記載の画像処理装置であって、
前記複数の候補値は、更に、予め設定された許容最大値を含む、画像処理装置。
【請求項7】
請求項1に記載の画像処理装置であって、
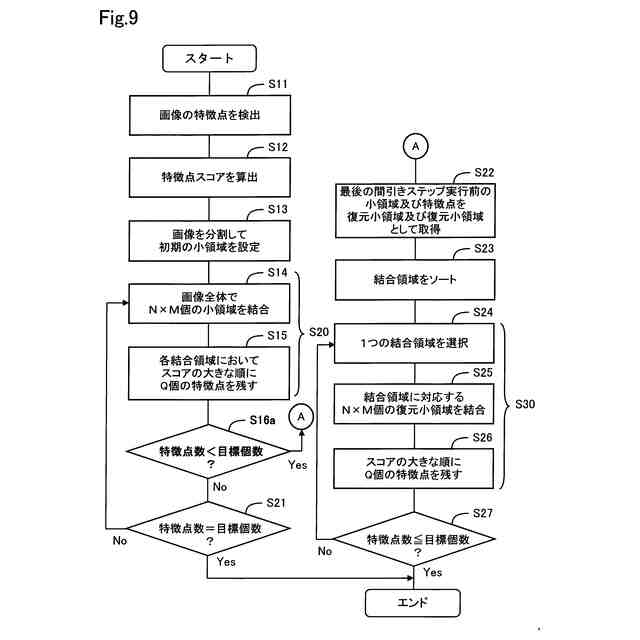
最後に実行される前記間引きステップである最終間引きステップの処理によって前記画像の全体に残存する前記特徴点の個数が予め設定された目標個数よりも少なくなる場合に、前記間引き処理部は、
(e1)前記最終間引きステップの処理前における前記複数の小領域及び前記複数の特徴点を、複数の復元小領域及び複数の復元特徴点として取得する処理と、
(e2)前記最終間引きステップの処理後の前記複数の結合領域のうちの1つを選択する処理と、
(e3)前記選択された前記結合領域に対応するN×M個の前記復元小領域を結合して新たな結合領域を生成する処理と、
(e4)前記新たな結合領域に存在する前記復元特徴点のうち、前記特徴点スコアの大きな順にQ個の前記復元特徴点を選択して他の前記復元特徴点を前記新たな結合領域から削除する処理と、
(e5)前記復元特徴点の残数が前記目標個数以下になるまで前記処理(e2)~(e4)を繰り返す処理と、
を実行するように構成されている、画像処理装置。
【請求項8】
請求項7に記載の画像処理装置であって、
前記間引き処理部は、
前記複数の小領域を記憶するための2つのバッファメモリを有しており、
各間引きステップにおける前記処理(b)を、前記2つのバッファメモリのうちの一方のバッファメモリから前記結合の前の前記N×M個の前記小領域を読み出すとともに、他方のバッファメモリへ前記結合の後の前記結合領域を書き込むことによって実行する、画像処理装置。
【請求項9】
請求項8に記載の画像処理装置であって、
前記間引き処理部は、
前記処理(e1)を、前記2つのバッファメモリのうち、前記最後の前記間引きステップにおける読み出しに使用された第1のバッファメモリから前記複数の小領域を読み出すことによって実行し、
前記処理(e2)における前記選択を、前記2つのバッファメモリのうちの第2のバッファメモリに記憶されている前記複数の結合領域を用いて実行し、
前記処理(e3)~(e5)を、前記選択された前記結合領域に対応する前記N×M個の前記復元小領域を前記第1のバッファメモリから読み出して実行する、画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、特徴点の間引き処理を行う画像処理装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、特徴点の間引き処理を実行する画像処理装置が開示されている。この画像処理装置は、画像を複数領域に分割し、分割領域毎に特徴点が予め設定した特徴点制限数以内となるように特徴点の間引きを実行する。この際、特徴点の信頼度が低い順に間引きを行う。
【先行技術文献】
【特許文献】
【0003】
特開2012-234258号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、各分割領域で特徴点数を制限数以内にするため、画像全体の特徴点数を効率的に調整するのが難しいという問題があった。そこで、画像全体の特徴点数を調整しつつ、効率的に間引き処理を実行できる技術が望まれる。
【課題を解決するための手段】
【0005】
本開示の一形態によれば、画像処理装置(100)が提供される。この画像処理装置は、画像から複数の特徴点を検出する特徴点検出部(110)と、前記複数の特徴点のそれぞれに関する特徴点スコアを算出するスコア算出部(120)と、前記特徴点スコアを用いて前記複数の特徴点の間引きを実行する間引き処理部(130)と、を備える。前記間引き処理部は、(a)前記画像を初期の複数の小領域に分割する処理と、(b)N,Mの一方を1以上の整数とし、他方を2以上の整数としたとき、互いに隣接するN×M個の前記小領域を結合することによって、複数の結合領域を生成する処理と、(c)Qを1以上の整数としたとき、前記複数の結合領域の各結合領域に存在する前記特徴点のうち、前記特徴点スコアの大きな順にQ個の前記特徴点を選択して他の前記特徴点を前記結合領域から削除する処理と、(d)予め設定された終了条件が成立するまで、前記複数の結合領域を新たな複数の小領域として前記処理(b),(c)の間引きステップを繰り返す処理と、を実行するように構成されている。
【0006】
この画像処理装置によれば、小領域を結合しながら特徴点の間引きを行うので、画像全体の特徴点数を調整しつつ、効率的に間引きを実行できる。
【図面の簡単な説明】
【0007】
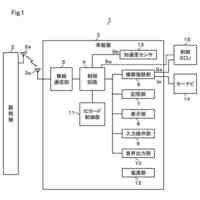
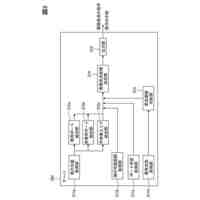
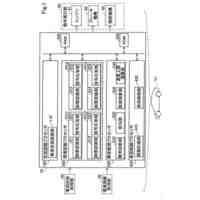
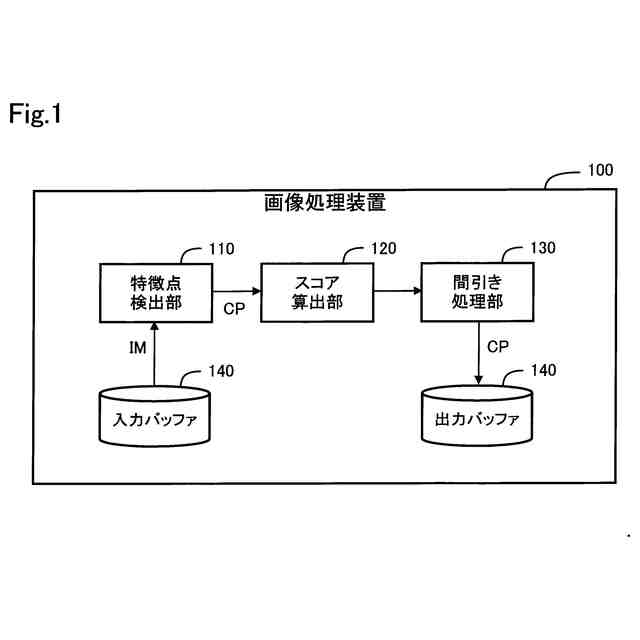
実施形態としての画像処理装置の構成を示すブロック図。
第1実施形態における間引き処理の手順を示すフローチャート。
処理対象の画像の例を示す説明図。
検出された複数の特徴点を含む特徴点マップの例を示す説明図。
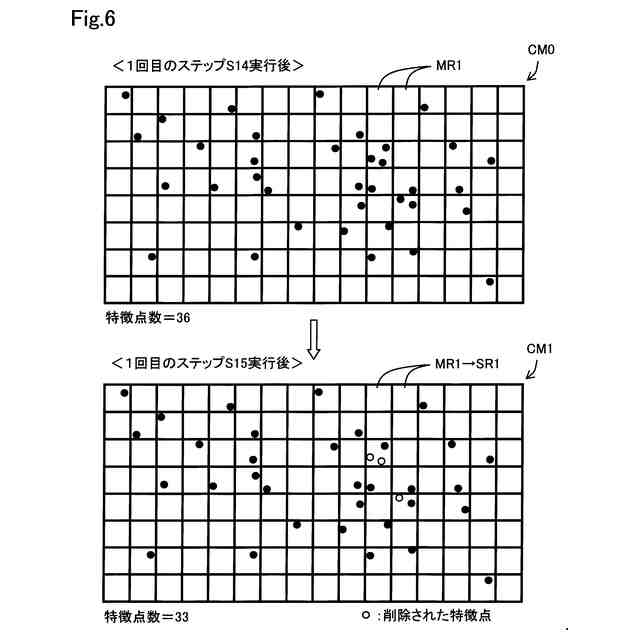
初期の複数の小領域に分割された特徴点マップを示す説明図。
1回目の間引きステップ実行後の特徴点マップを示す説明図。
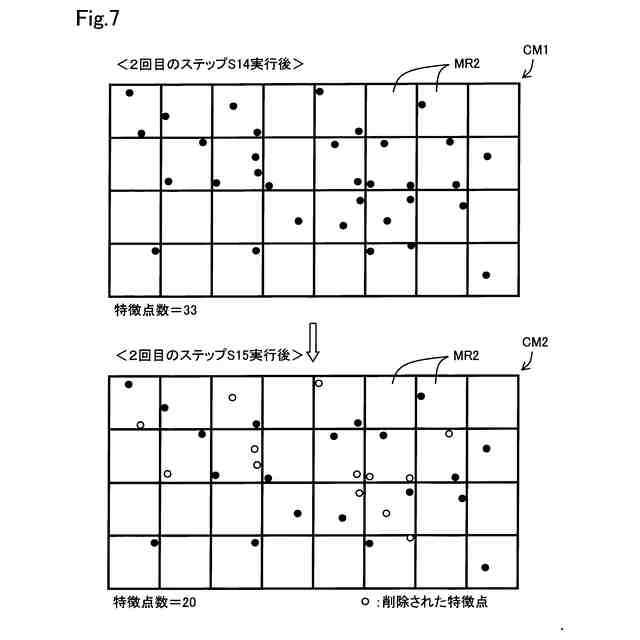
2回目の間引きステップ実行後の特徴点マップを示す説明図。
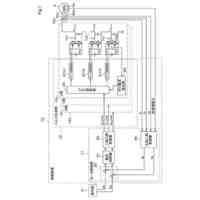
第1実施形態に適用可能な間引き処理部の構成を示すブロック図。
第2実施形態における間引き処理の手順を示すフローチャート。
復元小領域で構成される復元特徴点マップを示す説明図。
復元結合領域のソート順を示す説明図。
調整間引き処理後の特徴点マップを示す説明図。
第2実施形態に適用可能な間引き処理部の構成を示すブロック図。
第3実施形態における間引き処理の手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1に示すように、第1実施形態の画像処理装置100は、特徴点検出部110と、スコア算出部120と、間引き処理部130と、入力バッファ140と、出力バッファ150とを備える。
【0009】
特徴点検出部110は、入力バッファ140を介して外部装置から入力された画像IMから、複数の特徴点CPを検出する処理を実行する。特徴点CPの検出アルゴリズムとしては、例えば、Harrisコーナー検出や、Shi-Tomashiコーナー検出、GFTT、SIFT、SURF、FAST、AKAZE,ORBなどを用いることができる。スコア算出部120は、複数の特徴点CPのそれぞれに関する特徴点スコアを算出する。特徴点スコアは、特徴点CPの信頼度を示す指標である。特徴点スコアとしては、例えば、HarrisコーナースコアやShi-Tomasiコーナースコアなどを使用することができる。間引き処理部130は、特徴点スコアを用いて複数の特徴点CPの間引きを実行する。間引き処理後の複数の特徴点CPは、出力バッファ150を介して外部装置に出力される。
【0010】
画像処理装置100は、ハードウェア回路として実装することが可能である。また、画像処理装置100の機能をコンピュータープログラムとして実装するようにしてもよい。即ち、プロセッサがコンピュータープログラムを実行することによって、画像処理装置100の機能を実現するようにしてもよい。但し、画像処理装置100をハードウェア回路として構成すれば、より高速に間引き処理を実行できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
4日前
株式会社デンソー
回転機
4日前
株式会社デンソー
車載器
17日前
株式会社デンソー
電子装置
12日前
株式会社デンソー
検出装置
3日前
株式会社デンソー
ステータ
17日前
株式会社デンソー
ステータ
17日前
株式会社デンソー
反力装置
11日前
株式会社デンソーエレクトロニクス
発音装置
21日前
株式会社デンソー
ねじ部材
17日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
電子装置
21日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
半導体装置
17日前
株式会社デンソーテン
インバータ
11日前
株式会社デンソー
レーダ装置
21日前
株式会社デンソー
農業用装置
13日前
株式会社デンソー
電流センサ
4日前
株式会社デンソー
電波吸収装置
21日前
株式会社デンソー
運航管理装置
10日前
株式会社デンソー
電力変換装置
25日前
株式会社デンソー
運転支援装置
12日前
株式会社デンソー
電子制御装置
17日前
株式会社デンソーテン
車載映像装置
17日前
株式会社デンソー
通信システム
21日前
株式会社デンソー
衝突予測装置
12日前
株式会社デンソー
車載システム
11日前
株式会社デンソー
制御システム
24日前
株式会社デンソー
車両制御装置
11日前
株式会社デンソー
電力変換装置
13日前
株式会社デンソー
電圧検出回路
13日前
株式会社デンソー
車載システム
11日前
株式会社デンソー
衝突予測装置
12日前
株式会社デンソー
フィルタ回路
25日前
株式会社デンソー
ステータコア
24日前
株式会社デンソー
電気化学セル
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ