TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163593
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024067019
出願日
2024-04-17
発明の名称
切断用ツール把持装置
出願人
日鉄テックスエンジ株式会社
代理人
弁理士法人朝日奈特許事務所
主分類
B25J
15/00 20060101AFI20251022BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ハンドリングロボットにより取り出そうとする切断用ツールの厚さが薄い場合であっても、切断用ツールを変形させることなく、切断用ツールを取り出すことができる切断用ツール把持装置を提供すること。
【解決手段】略円形の切断用ツールが支持される保管台から、1または複数の切断用ツールを分離するための切断用ツール把持装置であって、切断用把持装置は、ハンドリングロボットに設けられる吸着部であって、保管台に支持された切断用ツールを吸着することにより切断用ツールを保持する吸着部と、吸着部により保持された切断用ツールを、保管台に支持された隣接する切断用ツールから分離する分離機構とを備え、分離機構は、吸着部を、隣接する切断用ツールに対し、隣接する切断用ツールの端面に沿って相対的に移動させるように構成されている。
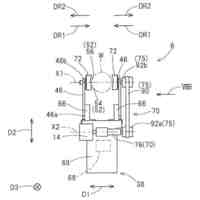
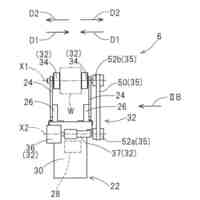
【選択図】図2
特許請求の範囲
【請求項1】
略円形の切断用ツールが支持される保管台から、1または複数の切断用ツールを分離するための切断用ツール把持装置であって、
前記切断用把持装置は、
ハンドリングロボットに設けられる吸着部であって、前記保管台に支持された切断用ツールを吸着することにより前記切断用ツールを保持する吸着部と、
前記吸着部により保持された切断用ツールを、前記保管台に支持された隣接する切断用ツールから分離する分離機構とを備え、
前記分離機構は、前記吸着部を、前記隣接する切断用ツールに対し、前記隣接する切断用ツールの端面に沿って相対的に移動させるように構成されている、切断用ツール把持装置。
続きを表示(約 580 文字)
【請求項2】
前記分離機構は、前記吸着部が前記隣接する切断用ツールの端面に沿って移動した際に、前記隣接する切断用ツールを、前記吸着部の移動方向とは異なる所定の方向に押圧するように構成されている、請求項1に記載の切断用ツール把持装置。
【請求項3】
前記分離機構は、前記隣接する切断用ツールを、前記所定の方向へ叩くように構成されている、請求項2に記載の切断用ツール把持装置。
【請求項4】
前記分離機構は、
前記隣接する切断用ツールを前記所定の方向に叩くアーム部と、
前記アーム部が前記切断用ツールを叩くように、前記アーム部を回動させる駆動部とを備える、請求項3に記載の切断用ツール把持装置。
【請求項5】
前記分離機構は、
前記吸着部に保持された切断用ツールの軸方向に沿って前記アーム部を移動させる移動部を備え、
前記移動部は、前記アーム部が前記隣接する切断用ツールを叩く第1の位置と、前記第1の位置から退避した第2の位置との間で、前記アーム部を移動させるように構成されている、請求項4に記載の切断用ツール把持装置。
【請求項6】
複数の前記吸着部が、前記切断用ツールの周方向に沿って並ぶように配置されている、請求項1に記載の切断用ツール把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、切断用ツール把持装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、丸刃せん断式スリッターのアーバーに装着される丸刃、スペーサ(以下、これらを総称して切断用ツールとも称する)を保管・分離するために、丸刃分離装置が用いられている(たとえば特許文献1を参照)。特許文献1に記載の丸刃分離装置は、ハンドリングロボットにより、保管棚に連続して並べられた複数の切断用ツールのうち、所望の枚数の切断用ツールを分離して、丸刃せん断式スリッター用のアーバーに取り付ける。具体的には、2つのフィンガーフレームの先端に設けられたフィンガーが、切断用ツールを切断用ツールの内径側から把持し、保管棚から切断用ツールを上方に持ち上げることにより、取り出される切断用ツールを残りの切断用ツールから分離する。
【先行技術文献】
【特許文献】
【0003】
特開2004-66427号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
保管棚で、隣り合う切断用ツールは、切断用ツールの軸方向に連続して配置され、切断用ツールの端面同士は接している。この切断用ツールには、ハンドリングロボットや、切断用ツールにより切断される鋼板などから、防錆油等が付着することが多く、互いに接触する複数の切断用ツールの間のわずかな隙間に防錆油等の液体が入り込むことがある。防錆油等の液体が、2枚の切断用ツールの間に入り込むと、2つの端面間での付着力が高まる。
【0005】
このような場合、ハンドリングロボットにより、たとえば1枚の切断用ツールを分離しようとした場合に、1枚目の切断用ツールと2枚目の切断用ツールとの間で高まった付着力により、取り出そうとした1枚の切断用ツールだけでなく、隣接する切断用ツールも持ち上がってしまうという問題があった。また、隣接する切断用ツールは、ハンドリングロボットのフィンガーによって、切断用ツールの内径側から把持されていないため、切断用ツールが一度持ち上がった後に落下したり、ハンドリングロボット側に倒れたりするという不具合も生じてしまう。
【0006】
また、切断用ツールの厚さが薄い場合に、ハンドリングロボットのフィンガーによって切断用ツールを把持すると、フィンガーから受ける押圧力によって切断用ツールが変形する可能性がある。
【0007】
そこで、本発明は、上記問題に鑑みて、ハンドリングロボットにより、取り出そうとする所望の枚数の切断用ツールのみを取り出すことができ、分離が不要な切断用ツールを確実に保管場所に残しておくことができ、取り出そうとする切断用ツールの厚さが薄い場合であっても、切断用ツールを変形させることなく、切断用ツールを取り出すことができる切断用ツール把持装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の切断用ツール把持装置は、略円形の切断用ツールが支持される保管台から、1または複数の切断用ツールを分離するための切断用ツール把持装置であって、前記切断用把持装置は、ハンドリングロボットに設けられる吸着部であって、前記保管台に支持された切断用ツールを吸着することにより前記切断用ツールを保持する吸着部と、前記吸着部により保持された切断用ツールを、前記保管台に支持された隣接する切断用ツールから分離する分離機構とを備え、前記分離機構は、前記吸着部を、前記隣接する切断用ツールに対し、前記隣接する切断用ツールの端面に沿って相対的に移動させるように構成されている、切断用ツール把持装置である。
【発明の効果】
【0009】
本発明によれば、ハンドリングロボットにより、取り出そうとする所望の枚数の切断用ツールのみを取り出すことができ、分離が不要な切断用ツールを確実に保管場所に残しておくことができ、取り出そうとする切断用ツールの厚さが薄い場合であっても、切断用ツールを変形させることなく、切断用ツールを取り出すことができる切断用ツール把持装置を提供することができる。
【図面の簡単な説明】
【0010】
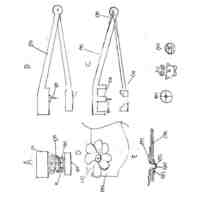
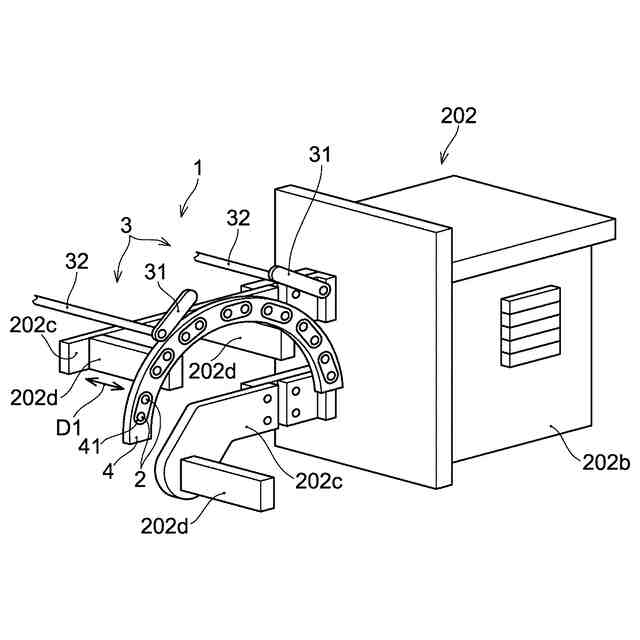
本発明の一実施形態に係る切断用ツール把持装置が用いられるツール交換システムの構成を模式的に示す斜視図である。
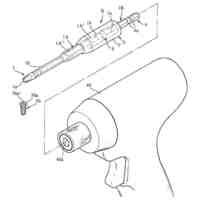
本発明の一実施形態に係る切断用ツール把持装置を模式的に示す斜視図である。
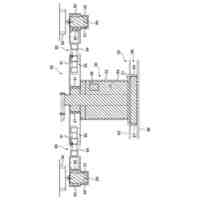
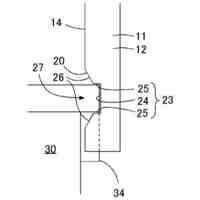
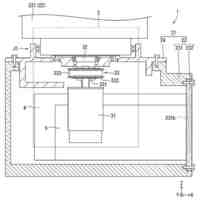
本発明の一実施形態に係る保管台の一例を模式的に示す斜視図である。
図2に示される切断用ツール把持装置において、分離機構のアーム部の動作の一例を、隣接ツール(把持対象の切断用ツールである分離ツールに隣接する切断用ツール)の軸方向から見て模式的に示す図である。
図2に示される切断用ツール把持装置において、分離機構のアーム部の動作の一例を隣接ツールの軸方向から見て模式的に示す図である。
図5に示される吸着部が隣接ツールの端面に沿った方向への移動を開始するとともに、アーム部が隣接ツールに接触して押圧を開始する様子を、隣接ツールの軸方向と直交する方向から見て模式的に示す図である。
図6に示される状態から変化して、アーム部が、隣接ツールに対して、隣接ツールの端面に沿った方向に相対的に移動する様子を、隣接ツールの軸方向と直交する方向から見て模式的に示す図である。
図7に示される状態から変化して、吸着部に吸着された分離ツールが、隣接ツールから分離される様子を、隣接ツールの軸方向と直交する方向から見て模式的に示す図である。
図1に示されるツール交換システムにおいて、ツール交換システムのハンドリングロボットによって保管台から分離ツールを取り出した状態を模式的に示す図である。
図1に示されるツール交換システムにおいて、ツール交換システムのハンドリングロボットによって分離ツールを仮組軸装置に取り付ける様子を模式的に示す図である。
分離機構の第1の変形例を、隣接ツールの軸方向から見て模式的に示す図である。
分離機構の第2の変形例を、隣接ツールの軸方向から見て模式的に示す図である。
分離機構の第2の変形例を、隣接ツールの軸方向と直交する方向から見て模式的に示す図である。
分離機構の第3の変形例を、隣接ツールの軸方向から見て模式的に示す図である。
分離機構の第3の変形例を、隣接ツールの軸方向と直交する方向から見て模式的に示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
17日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
29日前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
29日前
川崎重工業株式会社
ハンド
21日前
株式会社マキタ
ハンマドリル
4日前
株式会社マキタ
ハンマドリル
4日前
SMC株式会社
着脱装置
1か月前
工機ホールディングス株式会社
作業機
21日前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
24日前
株式会社不二越
エッジ仕上げ装置
1か月前
川崎重工業株式会社
塗装システム
21日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
1日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
24日前
アネックスツール株式会社
ドライバービット
28日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
工機ホールディングス株式会社
作業機
21日前
ライオン株式会社
移載システム
1か月前
大和ハウス工業株式会社
ねじ回転工具
1か月前
トヨタ自動車株式会社
ロボットハンド
1日前
ワールド技研株式会社
ロボットセル装置
29日前
株式会社マキタ
現場用作業機
10日前
川崎重工業株式会社
ワーク搬送ロボット
21日前
株式会社マキタ
回転打撃工具
24日前
株式会社不二越
ロボットに用いる伝送路
14日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
NTN株式会社
ハンド
1か月前
トヨタ自動車株式会社
ロボットの制御装置
28日前
山九株式会社
レンチ保持治具
24日前
セイコーエプソン株式会社
ロボット
28日前
NTN株式会社
把持装置
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ