TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163605
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024067039
出願日
2024-04-17
発明の名称
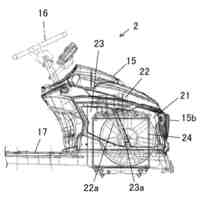
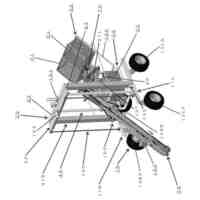
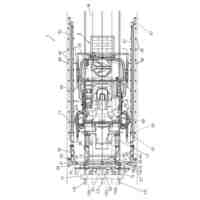
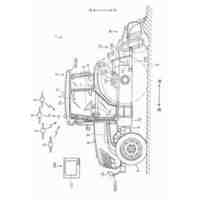
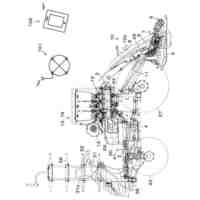
乗用型苗植機
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20251022BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
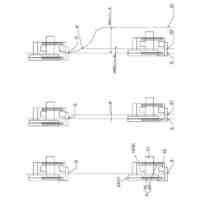
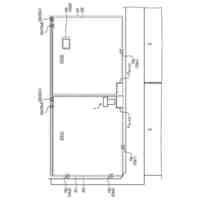
【課題】作業車両は、走行経路を算出し、GNSSにて自車位置を算出しながら走行経路に沿った自動走行を行なう。然しながら、圃場毎に自動走行を行うためのティーチングと作業による走行を行なうことで圃場が荒れる問題や圃場毎のティーチング作業が煩雑であるという課題がある。そこで、圃場の荒れを減らしティーチング作業を簡略化した乗用型苗植機を提供する。
【解決手段】制御装置が畦A1~A3にて区切られた複数の圃場F1~F6の内周部を走行するティーチング工程にて圃場情報を取得して自律走行で苗植作業を行なう自律走行経路を算出する際に、傾斜センサ37が所定角度以上に前上がりになった後に前下がりになった前後傾斜を検知した場所を畦A1~A3と認識して畦越え地点として登録し、対向する畦越え地点をつないだラインを畦A1~A3として登録する。
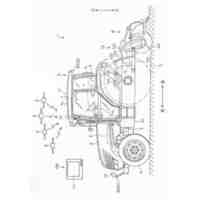
【選択図】図2
特許請求の範囲
【請求項1】
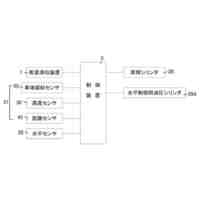
走行車体(2)に苗植付部(4)を装着し、衛星測位システム、制御装置(25)及び機体の前後傾斜を検出する傾斜センサ(37)を設けた乗用型苗植機において、制御装置(25)が畦(A1~A3)にて区切られた複数の圃場(F1~F6)の内周部を走行するティーチング工程にて圃場情報を取得して自律走行で苗植作業を行なう自律走行経路を算出する際に、傾斜センサ(37)が所定角度以上に前上がりになった後に前下がりになった前後傾斜を検知した場所を畦(A1~A3)と認識して畦越え地点として登録し、対向する畦越え地点をつないだラインを畦(A1~A3)として登録することを特徴とする乗用型苗植機。
続きを表示(約 410 文字)
【請求項2】
圃場(F1~F6)のティーチング工程の2辺目で畦越え地点を登録しない場合は3辺目のティーチング工程終了時に自動モードに移行可で、ティーチング工程の2辺目で畦越え地点を登録した場合は3辺目のティーチング工程終了時に自動モードに移行不可で4辺目のティーチング工程終了時に自動モードに移行可とし、3辺目のティーチング工程終了時に自動モードの移行可否を報知することを特徴とする請求項1記載の乗用型苗植機。
【請求項3】
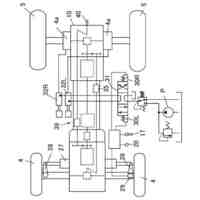
自動モードで自律走行経路を進行中に畦(A1~A3)に近づくと減速しデフロック機構を作動させ、畦(A1~A3)直前で停止し苗植付部(4)を上昇し自動モードから手動モードに切り換え、畦越え終了後に苗植付部(4)を下降し苗植付部(4)の駆動を開始し手動モードから自動モードに切り換えデフロック機構のデフロックを解除することを特徴とする請求項1または請求項2に記載の乗用型苗植機。
発明の詳細な説明
【技術分野】
【0001】
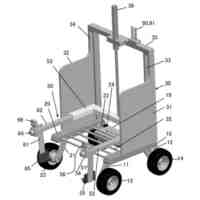
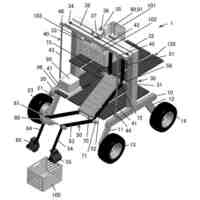
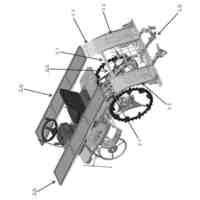
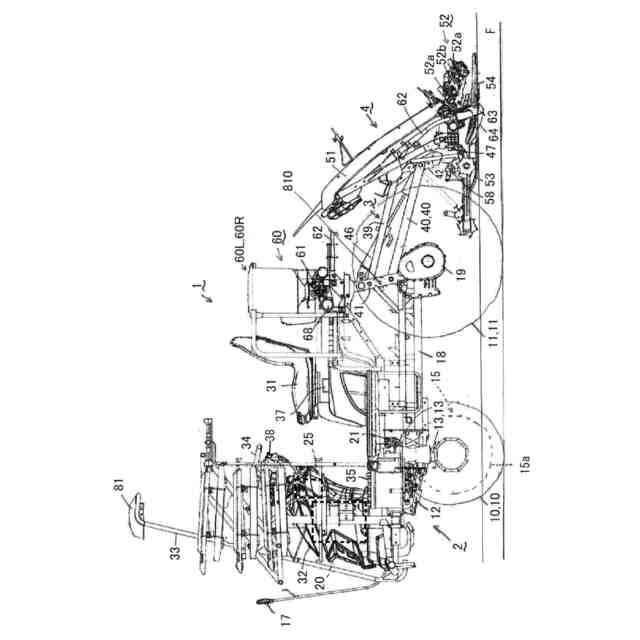
本発明は、走行車体に苗植付部を装着した乗用型苗植機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、自動走行により作業を行なう作業車両(作業機)は、走行経路を算出し、GNSS等にて自車位置を算出しながら走行経路に沿った自動走行を行なう(例えば、特許文献1及び特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-116608号公報
特開2019-154394号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場毎に自動走行を行うためのティーチングと作業による走行を行なうことで圃場が荒れる問題や圃場毎のティーチング作業が煩雑であるという課題がある。
【0005】
本発明は、上記に鑑みてなされたものであって、圃場の荒れを減らしティーチング作業を簡略化した乗用型苗植機を提供することを目的とする。
【課題を解決するための手段】
【0006】
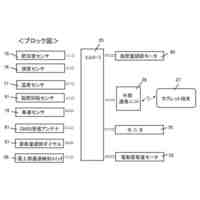
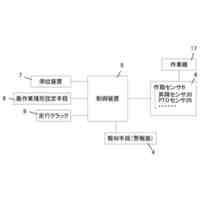
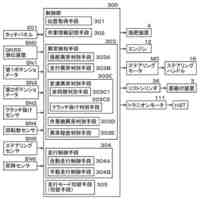
請求項1記載の発明は、走行車体2に苗植付部4を装着し、衛星測位システム、制御装置25及び機体の前後傾斜を検出する傾斜センサ37を設けた乗用型苗植機において、制御装置25が畦A1~A3にて区切られた複数の圃場F1~F6の内周部を走行するティーチング工程にて圃場情報を取得して自律走行で苗植作業を行なう自律走行経路を算出する際に、傾斜センサ37が所定角度以上に前上がりになった後に前下がりになった前後傾斜を検知した場所を畦A1~A3と認識して畦越え地点として登録し、対向する畦越え地点をつないだラインを畦A1~A3として登録する乗用型苗植機である。
【0007】
請求項1記載の発明によれば、畦A1~A3にて区切られた複数の圃場F1~F6の内周部を走行するティーチング工程にて圃場情報を取得して自律走行で苗植作業を行なう自律走行経路を算出するので、複数の圃場F1~F6毎にティーチング工程を行なう場合に比して、圃場F1~F6の荒れを減らすことができ、また、ティーチング作業を簡略化して作業効率が良くなる。
【0008】
また、傾斜センサ37が所定角度以上に前上がりになった後に前下がりになった前後傾斜を検知した場所を畦A1~A3と認識して畦越え地点として登録し、対向する畦越え地点をつないだラインを畦A1~A3として登録するので、傾斜センサ37にて適切に畦A1~A3を認識して登録することができる。
【0009】
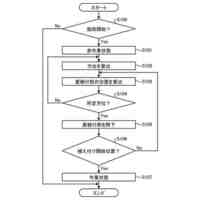
請求項2記載の発明は、圃場F1~F6のティーチング工程の2辺目で畦越え地点を登録しない場合は3辺目のティーチング工程終了時に自動モードに移行可で、ティーチング工程の2辺目で畦越え地点を登録した場合は3辺目のティーチング工程終了時に自動モードに移行不可で4辺目のティーチング工程終了時に自動モードに移行可とし、3辺目のティーチング工程終了時に自動モードの移行可否を報知する請求項1記載の乗用型苗植機である。
【0010】
請求項3記載の発明は、自動モードで自律走行経路を進行中に畦A1~A3に近づくと減速しデフロック機構を作動させ、畦A1~A3直前で停止し苗植付部4を上昇し自動モードから手動モードに切り換え、畦越え終了後に苗植付部4を下降し苗植付部4の駆動を開始し手動モードから自動モードに切り換えデフロック機構のデフロックを解除する請求項1または請求項2に記載の乗用型苗植機である。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
7日前
井関農機株式会社
田植え機
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
27日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ