TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164049
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067774
出願日
2024-04-18
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
B25C
1/00 20060101AFI20251023BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性を向上させた作業機を提供する。
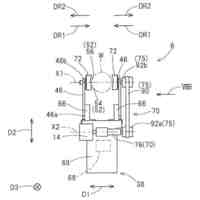
【解決手段】作業機は、止具である釘Nが供給される射出部42と、射出部42に供給された釘Nを打撃する打撃部48と、ロール状に巻かれた釘Nを収容するマガジン部74と、制御部と、制御部によって動作されて、マガジン部74から射出部42へ釘Nを供給する供給部と、マガジン部74から射出部42に供給可能な釘Nを検知可能な検知部230と、を備える。検知部230は、供給部の動作がない場合でも釘Nを検知可能である。
【選択図】図5
特許請求の範囲
【請求項1】
止具が供給される射出部と、
前記射出部に供給された前記止具を打撃する打撃部と、
ロール状に巻かれた前記止具を収容するマガジン部と、
制御部と、
前記制御部によって動作されて、前記マガジン部から前記射出部へ前記止具を供給する供給部と、
前記マガジン部から前記射出部に供給可能な前記止具を検知可能な検知部と、を備え、
前記検知部は、前記供給部の動作がない場合でも前記止具を検知可能である、作業機。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の作業機において、
前記検知部は、前記止具の位置によらず、前記止具を検知可能である、作業機。
【請求項3】
請求項2に記載の作業機において、
前記マガジン部は、複数の前記止具を一列に並べて前記射出部へ供給する通路である供給路を有し、
前記検知部は、前記供給路における所定の検知範囲に配置された前記止具を検知可能であり、
前記検知範囲は、前記供給路に所定本数以上の前記止具が配置される際に、前記供給路に並んだ前記止具の少なくとも1本が含まれる範囲である、作業機。
【請求項4】
請求項3に記載の作業機において、
前記止具は、頭部と胴部とを有する釘であり、
前記頭部が前記検知範囲に含まれる、作業機。
【請求項5】
請求項3に記載の作業機において、
前記検知部は、発光素子と受光素子とを有する、作業機。
【請求項6】
請求項5に記載の作業機において、
前記発光素子は、前記止具の供給方向に沿って光を照射する、作業機。
【請求項7】
請求項6に記載の作業機において、
前記射出部は前記打撃部が通過する射出口を有し、
前記検知範囲は、前記射出口を含む、作業機。
【請求項8】
請求項3に記載の作業機において、
前記検知部は、前記止具に当接する当接部材である、作業機。
【請求項9】
請求項8に記載の作業機において、
前記当接部材は、前記止具に当接する当接部を有し、
前記止具の供給方向において、前記当接部の長さは、前記供給路に並んだ前記止具の間隔よりも長い、作業機。
【請求項10】
請求項1から9までの何れか一項に記載の作業機において、
前記打撃部を第1方向の一方側に付勢する打撃付勢部と、
前記打撃部を前記打撃付勢部の付勢力に抗して前記第1方向の他方側に持ち上げる持上部と、
作業者に操作される操作部と、を備え、
前記供給部は、
送り部材と、
前記送り部材を前記射出部に向かって付勢する供給付勢部と、
前記送り部材を前記射出部と反対方向に付勢させるように駆動可能な供給駆動部と、を有し、
前記打撃部は、第1位置に位置する状態で前記操作部が操作されると、前記持上部によって前記第1方向の他方側へ第2位置まで移動し、前記打撃付勢部の付勢力によって前記第1方向の一方側へ前記第2位置から第3位置まで移動し、前記持上部によって前記第1方向の他方側へ前記第3位置から前記第1位置まで移動した後、前記第1位置にて停止し、
前記射出部に位置する前記止具の前記第1方向の他方側端部の位置である止具頭位置は、前記第1位置における前記打撃部の前記第1方向の一方側端部の位置と、前記第3位置における前記打撃部の前記第1方向の前記一方側端部の位置と、の間に位置し、
前記供給駆動部は、
前記マガジン部及び前記射出部にある前記止具が2本以上であることを前記検知部が検知した場合、前記打撃部が前記第1方向の他方側へ移動する最中であって、前記打撃部の前記第1方向の一方側の端部が前記止具の頭部位置を超えるときには駆動せず、
前記マガジン部及び前記射出部にある前記止具が1本以下であることを前記検知部が検知した場合、前記打撃部が前記第1方向の他方側へ移動する最中であって、前記打撃部の前記第1方向の一方側の端部が前記止具の前記頭部位置を超えるときに駆動する、作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来から、マガジンに収容されている止具である釘を射出部に供給した後に、釘を打撃する作業機の一例である釘打機が知られている。特許文献1には、ロール状に巻かれた状態でマガジン内に収容された止具が供給部によって射出部に供給された後、打撃部に打撃される作業機が開示されている。この作業機では、止具を射出部に供給する際に供給部にかかる負荷を検出することによって、マガジン内の止具の残量が判定可能である。
【先行技術文献】
【特許文献】
【0003】
特開2022-72885号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の作業機では、供給部を駆動させなければ止具の残量を判定することができない。このため、打撃を行った後に供給部を駆動する構成の場合、止具の残量がゼロのときに電源がオンされると、止具の有無が判定される前に打撃が行われ、空打ちが生じる。空打ちが生じると、作業機の耐久性が損なわれる可能性があり、利便性が損なわれる。
【課題を解決するための手段】
【0005】
一実施の形態による作業機は、止具が供給される射出部と、前記射出部に供給された前記止具を打撃する打撃部と、ロール状に巻かれた前記止具を収容するマガジン部と、制御部と、前記制御部によって動作されて、前記マガジン部から前記射出部へ前記止具を供給する供給部と、前記マガジン部から前記射出部に供給可能な前記止具を検知可能な検知部と、を備える。前記検知部は、前記供給部の動作がない場合でも前記止具を検知可能である。
【0006】
一実施の形態による作業機は、止具が供給される射出部と、前記射出部に供給された前記止具を打撃するように移動する打撃動作を行う打撃部と、ロール状に巻かれた前記止具を収容するマガジン部と、制御部と、前記制御部によって動作されて、前記マガジン部から前記射出部へ前記止具を供給する供給部と、を備える。前記マガジン部は、前記マガジン部から前記止具を出し入れする際に開閉される蓋部を有する。前記制御部は、前記蓋部が開閉された後、前記打撃部が打撃動作を行う前に、前記マガジン部に前記止具が収容されていないことを認識可能である。
【発明の効果】
【0007】
本発明によれば、利便性を向上した作業機を提供することができる。
【図面の簡単な説明】
【0008】
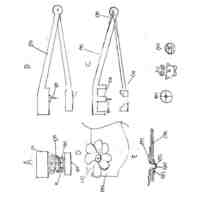
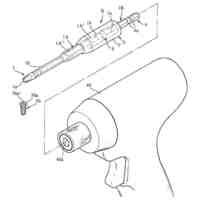
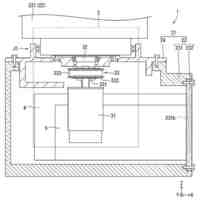
第1の実施形態の作業機の外観を示す側面図である。
作業機の回路構成を説明する回路ブロック図である。
打撃部及び持上部の外観図である。
射出部へ止具を供給する構成を説明する図である。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図である。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図である。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打込動作後の状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打撃部が下死点から待機位置へ移動中の状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打撃部が止具の上端よりも上側に位置する状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打込動作後の状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打撃部が下死点から待機位置へ移動中の状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、打撃部が止具の上端よりも上側に位置する状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、検知範囲内に止具が存在しない状態を示している。
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図であり、検知範囲内に止具が存在しない状態を示している。
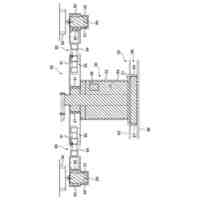
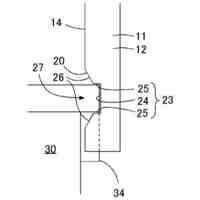
第1の実施形態の射出部と射出部の近傍に設けられた構造とを示す断面図であり、止具と打撃部とが当接している状態を示している。
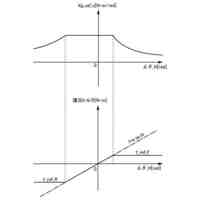
打撃部による打込動作と供給部による釘の供給動作とのタイミングを示すタミングチャートである。
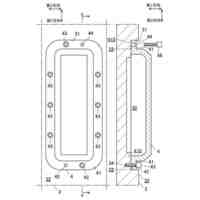
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す側面図である。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す斜視図である。
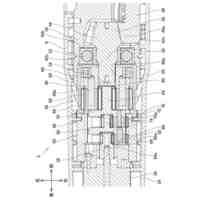
図17のA-A線に沿った断面図である。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の断面図であり、打込動作後の状態を示している。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の斜視図であり、止具を供給中の状態を示している。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の斜視図であり、止具の供給後の状態を示している。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の断面図であり、打込動作後の状態を示している。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の斜視図であり、止具を供給中の状態を示している。
第2の実施形態の射出部と射出部の近傍に設けられた構造とを示す図19と同様の斜視図であり、止具の供給後の状態を示している。
第3の実施形態の作業機が有する射出部と射出部の近傍に設けられた構造とを示す斜視図である。
第3の実施形態の作業機が有する射出部と射出部の近傍に設けられた構造とを示す斜視図である。
釘保持モードにおける、打撃部による打込動作と供給部による釘の供給動作とのタイミングを示すタミングチャートである。
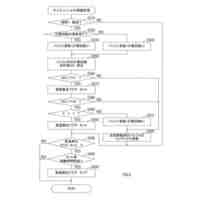
第3の実施形態の作業機による釘の供給動作の処理手順を説明するフローチャートである。
第3の実施形態の作業機による釘の供給動作の処理手順を説明するフローチャートである。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
比較例における射出部と射出部の近傍に設けられた構造とを示す断面図である。
第3の実施形態の射出部と射出部の近傍に設けられた構造とを示す断面図であり、最後の1本の釘が供給されるときの状態を示している。
【発明を実施するための形態】
【0009】
<第1の実施形態>
図面を参照しながら、第1の実施形態の作業機について説明する。
【0010】
図1は第1の実施形態の作業機10の側面図である。図2は、作業機10の回路ブロック図である。作業機10は、例えば電動釘打機である。作業機10では、所定の条件が満たされた場合、止具の一例である釘N(図4、図15等参照)が、後述する打撃部48によって打撃される。この場合、釘Nが後述する射出部42から射出されて相手材Gに打ち込まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
18日前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
22日前
株式会社マキタ
ハンマドリル
5日前
株式会社マキタ
ハンマドリル
5日前
トヨタ自動車株式会社
ロボット
25日前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
22日前
川崎重工業株式会社
塗装システム
22日前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社安川電機
ロボット
2日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
25日前
トヨタ自動車株式会社
ロボットハンド
2日前
アネックスツール株式会社
ドライバービット
29日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ライオン株式会社
移載システム
1か月前
工機ホールディングス株式会社
作業機
22日前
株式会社不二越
ロボットに用いる伝送路
15日前
株式会社マキタ
現場用作業機
11日前
川崎重工業株式会社
ワーク搬送ロボット
22日前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
25日前
トヨタ自動車株式会社
ロボットの制御装置
29日前
山九株式会社
レンチ保持治具
25日前
NTN株式会社
ハンド
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
セイコーエプソン株式会社
ロボット
29日前
株式会社マキタ
作業機
8日前
川崎重工業株式会社
ロボット
29日前
学校法人立命館
ロボットハンド制御システム
11日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ