TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060184
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170748
出願日
2023-09-29
発明の名称
移動体及び無線給電システム
出願人
学校法人法政大学
代理人
個人
,
個人
,
個人
主分類
H02J
50/20 20160101AFI20250403BHJP(電力の発電,変換,配電)
要約
【課題】電力の供給量を向上させることが可能な移動体を提供する。
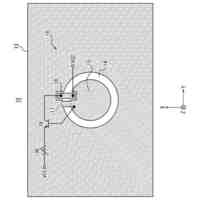
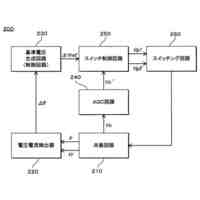
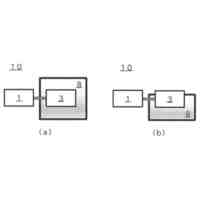
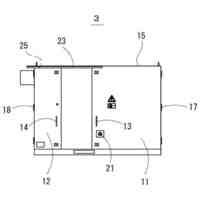
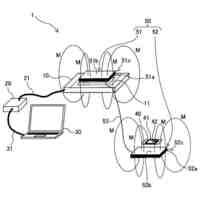
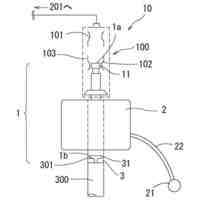
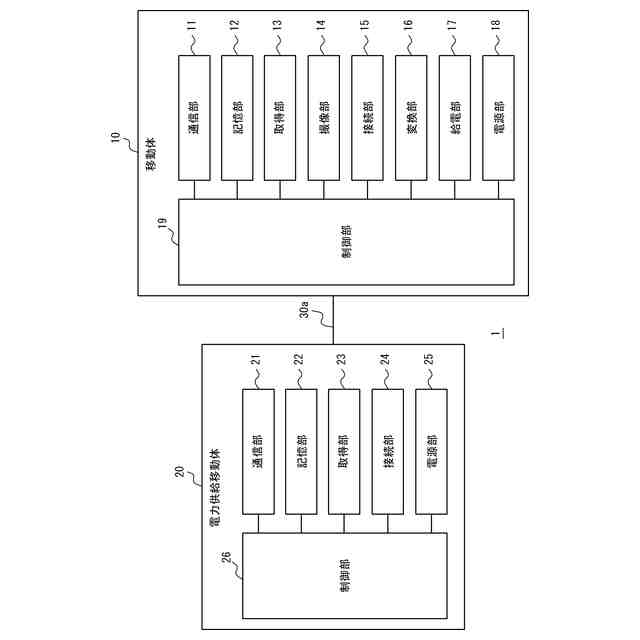
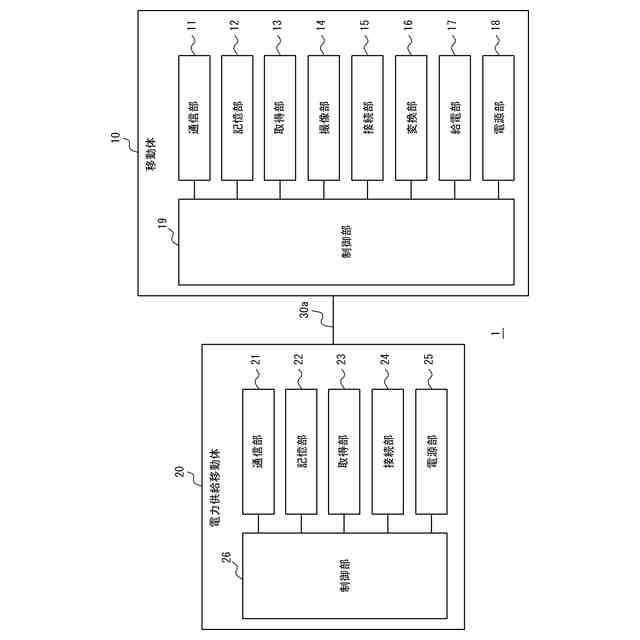
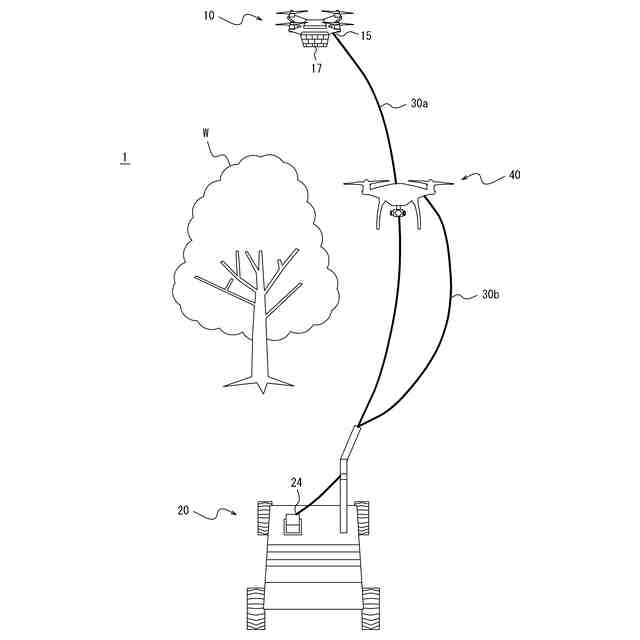
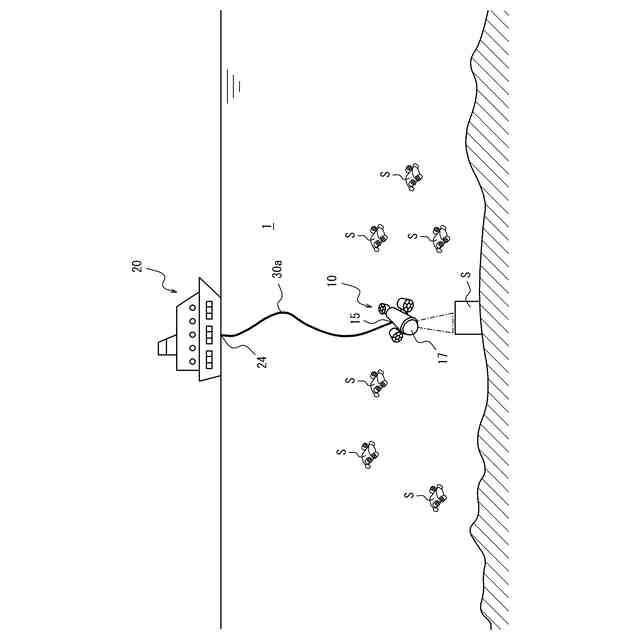
【解決手段】移動体10は、制御部19と、給電の対象となる対象物Sに無線給電を行う給電部17と、電力供給移動体20から延びる第1有線30aに接続されている接続部15と、を備え、電力供給移動体20から第1有線30aを介して第1電力の供給を受ける。
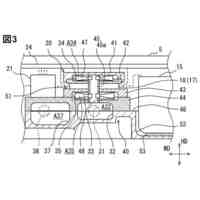
【選択図】図3
特許請求の範囲
【請求項1】
移動体であって、
制御部と、
給電の対象となる対象物に無線給電を行う給電部と、
電力供給移動体から延びる第1有線に接続されている接続部と、
を備え、
前記電力供給移動体から前記第1有線を介して第1電力の供給を受ける、
移動体。
続きを表示(約 960 文字)
【請求項2】
請求項1に記載の移動体であって、
前記電力供給移動体から供給された直流の前記第1電力を、前記給電部による前記無線給電に用いられる交流の前記第1電力に変換する変換部をさらに備える、
移動体。
【請求項3】
請求項1又は2に記載の移動体であって、
前記移動体と前記対象物との間の相対位置の取得に寄与する取得部をさらに備える、
移動体。
【請求項4】
請求項1又は2に記載の移動体であって、
前記対象物に前記移動体が接近したときに前記対象物の周囲を撮像する撮像部をさらに備える、
移動体。
【請求項5】
請求項4に記載の移動体であって、
前記制御部は、前記撮像部により撮像された画像に基づいて前記対象物を特定し、前記無線給電を行うときに、特定された前記対象物に応じて前記移動体の位置及び姿勢を制御する、
移動体。
【請求項6】
請求項5に記載の移動体であって、
前記給電部は、互いに異なる無線給電方式に従う複数の給電モジュールを含み、
前記制御部は、前記無線給電を行うときに、前記複数の給電モジュールのうち、特定された前記対象物に対応する前記給電モジュールに切り替える、
移動体。
【請求項7】
請求項1又は2に記載の移動体であって、
前記移動体は、飛行用のドローン又は水中移動用のドローンを含む、
移動体。
【請求項8】
請求項1又は2に記載の移動体と、
前記移動体に対し前記第1有線を介して前記第1電力を供給する前記電力供給移動体と、
を備える、
無線給電システム。
【請求項9】
請求項8に記載の無線給電システムであって、
前記電力供給移動体と前記移動体との間で前記第1有線を保持して前記第1有線の位置を調整する調整移動体をさらに備える、
無線給電システム。
【請求項10】
請求項9に記載の無線給電システムであって、
前記電力供給移動体は、前記調整移動体に対し第2有線を介して第2電力を供給する、
無線給電システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体及び無線給電システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
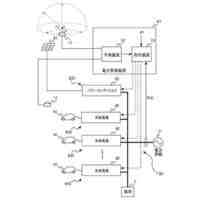
従来、飛行用のドローンと車両とを電源ケーブルによって互いに接続し、車両からドローンに対して電力供給を行うシステムが知られている。例えば、特許文献1には、天候に左右されることなく、車両と一緒に移動しながらドローンを長時間飛行させて、広いエリアのγ線量分布を効率よく測定する回転翼型無人航空機及び放射線量計測システムが開示されている。
【0003】
一方で、屋外の広大な領域にセンサなどを分散的に配置させて環境計測を行うニーズも年々高まっている。近年、ドローン型の無線給電ロボットを用いてそのようなセンサに対し無線給電を行うシステムも提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-027719号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の従来技術では、例えば、移動しながら無線給電を行う移動体に対する電力供給については考慮されていなかった。従来の無線給電用の移動体は、それ単体で無線給電を行うものに限定されていた。このとき、陸上を移動するような移動体であればまだしも、飛行用のドローン及び水中移動用のドローンなどの移動体に至っては、無線給電のための電力に加えて、移動に伴う動作にも多くの電力を消費することになる。
【0006】
このような電力消費が看過できないような移動体については、無線給電用の電力容量を確保するために移動体自体が大型化する傾向にあった。移動体自体の大型化に伴って、移動に伴う電力消費がますます増大するというさらなる問題も生じていた。
【0007】
従来技術では、このような移動体に対する給電計画などに着目されており、主としてマイクロ波技術及びオペレーションリサーチの専門家による実機を用いないシミュレーションベースでの理論研究が盛んに行われているのみであった。したがって、無線給電用の移動体を含むシステム上での電力容量の増大といった観点は、十分に考慮されていなかった。
【0008】
本開示は、電力の供給量を向上させることが可能な移動体及び無線給電システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するための第1の観点による移動体は、
制御部と、
給電の対象となる対象物に無線給電を行う給電部と、
電力供給移動体から延びる第1有線に接続されている接続部と、
を備え、
前記電力供給移動体から前記第1有線を介して第1電力の供給を受ける。
【0010】
第2の観点による無線給電システムは、
上記の移動体と、
前記移動体に対し前記第1有線を介して前記第1電力を供給する前記電力供給移動体と、
を備える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人法政大学
誘電率測定装置
2か月前
学校法人法政大学
装着型アシスト装置
6か月前
学校法人法政大学
バルブハンドル締め付け方法
16日前
学校法人法政大学
移動体及び無線給電システム
5か月前
学校法人法政大学
金属資源の乾式精錬方法及び乾式精錬装置
3か月前
学校法人法政大学
磁化推定装置、磁化推定方法、及びプログラム
24日前
学校法人法政大学
情報処理装置、情報処理システム、及び情報処理方法
2か月前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
3か月前
学校法人法政大学
磁化推定装置、磁化推定システム、磁化推定方法、学習モデルの生成方法、及びプログラム
3か月前
北日本海事興業株式会社
水中作業用パワーアシストスーツ駆動装置、およびパワーアシストスーツシステム
7か月前
個人
電源装置
16日前
個人
バッテリ内蔵直流電源
15日前
株式会社FUJI
制御盤
5日前
オムロン株式会社
電源回路
9日前
オムロン株式会社
電源回路
9日前
オムロン株式会社
電源回路
9日前
トヨタ自動車株式会社
回転子
16日前
ニデック株式会社
モータの制御方法
23日前
トヨタ自動車株式会社
回転子
1日前
東京応化工業株式会社
発電装置
9日前
大豊工業株式会社
モータ
15日前
ミサワホーム株式会社
居住設備
5日前
株式会社リコー
拡張アンテナ装置
8日前
富士電子工業株式会社
電力変換装置
17日前
ニチコン株式会社
AC入力検出回路
1日前
ユタカ電業株式会社
ケーブルダクト
5日前
日産自動車株式会社
ステータ
2日前
トヨタ自動車株式会社
ロータ
3日前
株式会社デンソー
電力変換装置
1日前
株式会社正興電機製作所
地絡確認装置
8日前
株式会社ミツバ
巻線装置
8日前
NTN株式会社
モータユニット
5日前
株式会社ダイヘン
電力管理装置
24日前
株式会社大林組
可搬式充電設備
2日前
株式会社アイシン
回転電機
1日前
株式会社アイシン
駆動装置
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ