TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074681
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185668
出願日
2023-10-30
発明の名称
自己位置推定システム、自己位置推定装置、自己位置推定方法、及び、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
B61L
25/02 20060101AFI20250507BHJP(鉄道)
要約
【課題】遠距離点群を用いた高精度な自己位置推定技術を提供する。
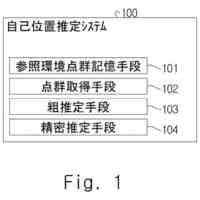
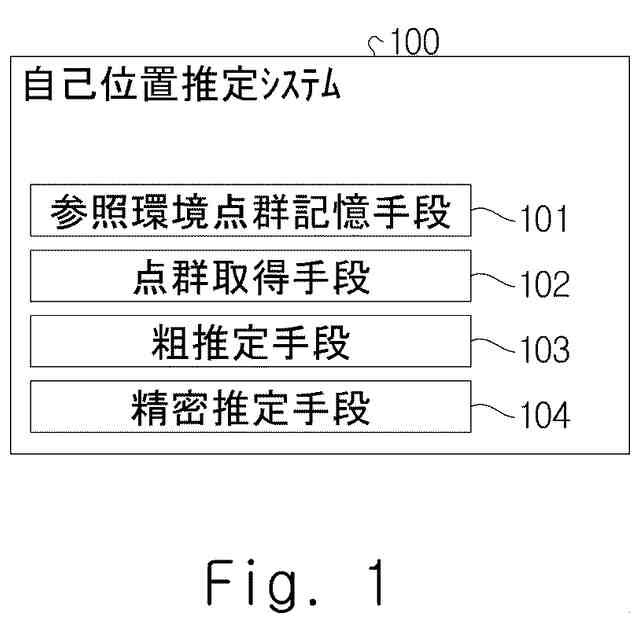
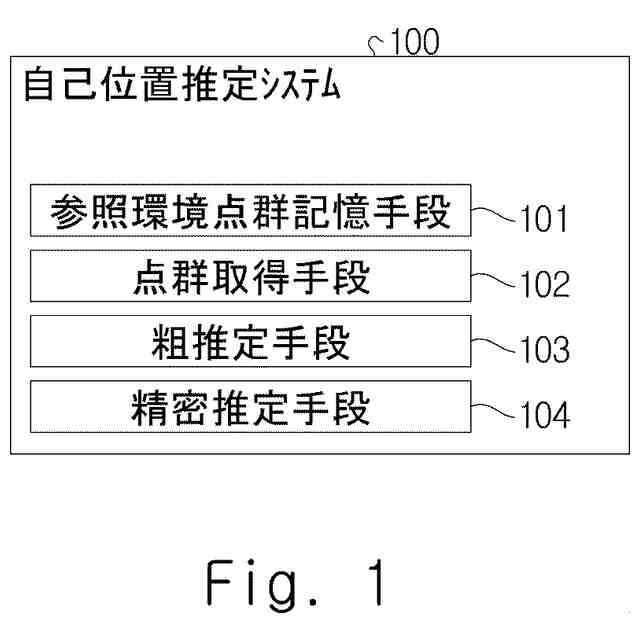
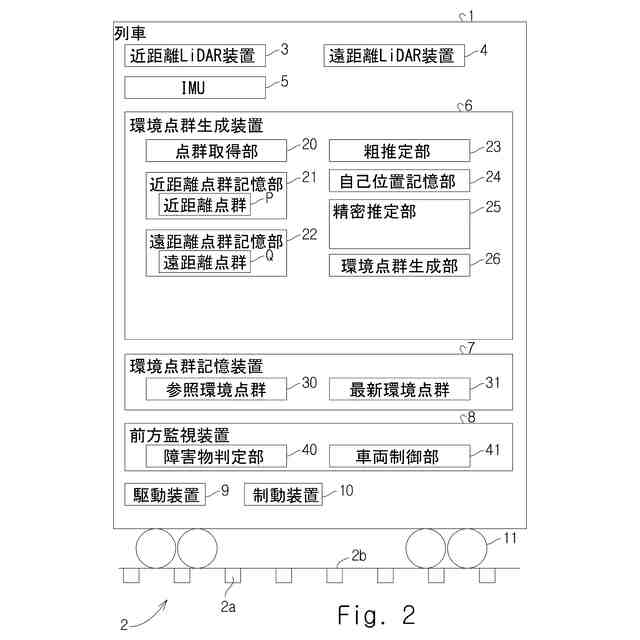
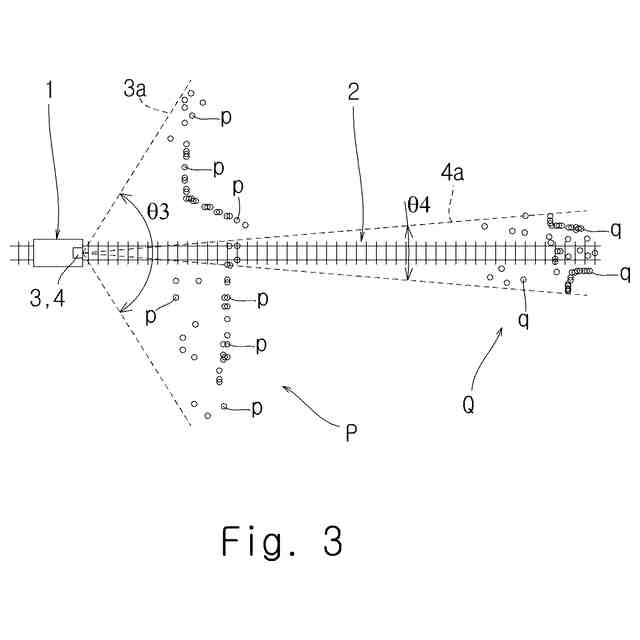
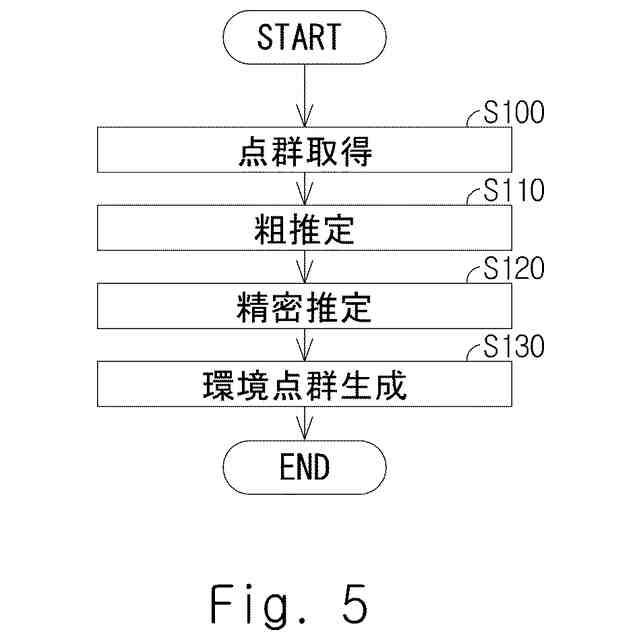
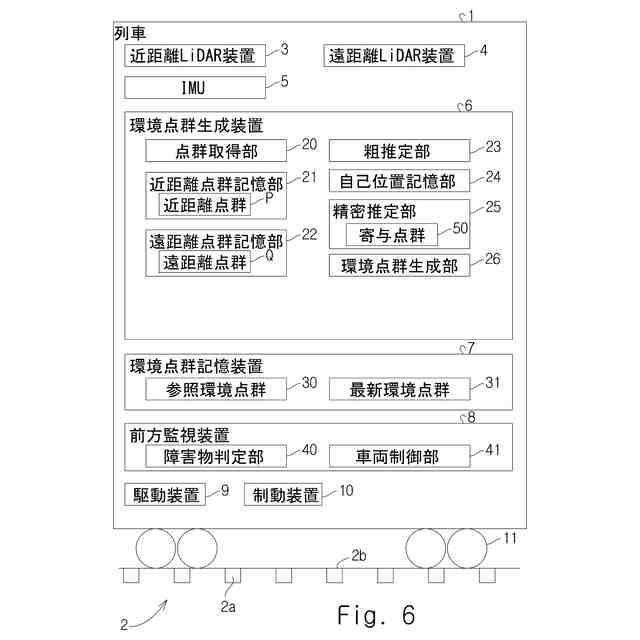
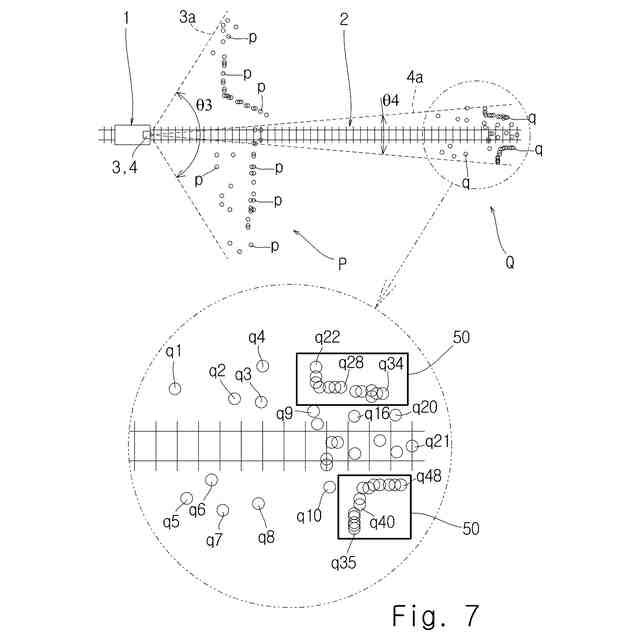
【解決手段】自己位置推定用の参照環境点群を記憶する参照環境点群記憶手段と、広視野の近距離点群と、前記近距離点群よりも遠方で且つ狭視野の遠距離点群と、を取得する点群取得手段と、前記近距離点群を前記参照環境点群に位置合わせすることで自己位置を粗推定する粗推定手段と、前記粗推定手段による粗推定結果を初期条件として、前記遠距離点群を前記参照環境点群に位置合わせすることで前記自己位置を精密推定する精密推定手段と、を含む、自己位置推定システムが提供される。
【選択図】図1
特許請求の範囲
【請求項1】
自己位置推定用の参照環境点群を記憶する参照環境点群記憶手段と、
広視野の近距離点群と、前記近距離点群よりも遠方で且つ狭視野の遠距離点群と、を取得する点群取得手段と、
前記近距離点群を前記参照環境点群に位置合わせすることで自己位置を粗推定する粗推定手段と、
前記粗推定手段による粗推定結果を初期条件として、前記遠距離点群を前記参照環境点群に位置合わせすることで前記自己位置を精密推定する精密推定手段と、
を含む、
自己位置推定システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の自己位置推定システムであって、
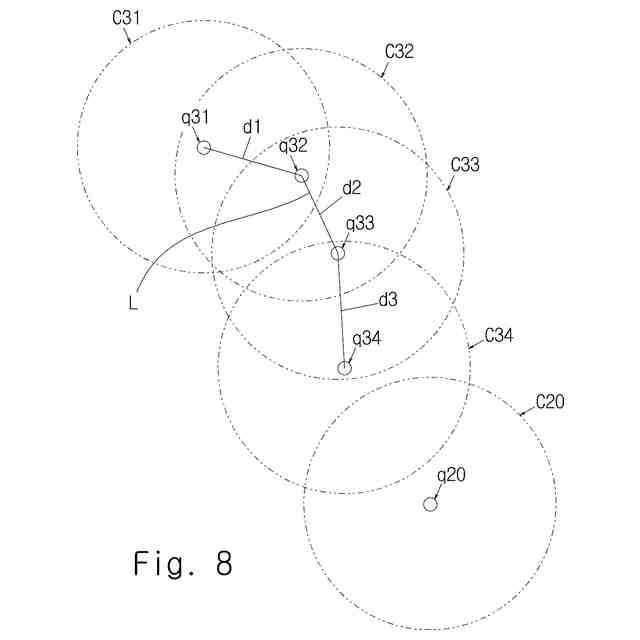
前記精密推定手段は、前記遠距離点群のうち精密推定に寄与する寄与点群を抽出し、抽出した寄与点群を前記参照環境点群に位置合わせすることで前記自己位置を精密推定する、
自己位置推定システム。
【請求項3】
請求項2に記載の自己位置推定システムであって、
前記寄与点群は、所定距離以上の連続性を有する点群である、
自己位置推定システム。
【請求項4】
請求項2に記載の自己位置推定システムであって、
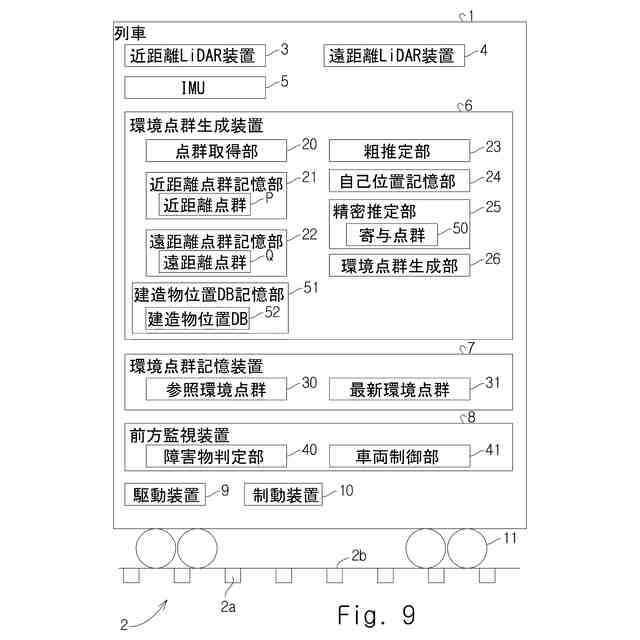
前記精密推定に寄与する複数の建造物の位置情報を示す建造物位置データベースを記憶する建造物位置データベース記憶手段を更に備え、
前記精密推定手段は、前記建造物位置データベースを参照することにより、前記遠距離点群から、前記複数の建造物のうち少なくとも何れか1つの建造物に対応する点群を前記寄与点群として抽出する、
自己位置推定システム。
【請求項5】
請求項4に記載の自己位置推定システムであって、
前記参照環境点群から、前記複数の建造物に対応する測距点以外の測距点を削除して成る部分参照環境点群を記憶する部分参照環境点群記憶手段を更に含み、
前記精密推定手段は、前記寄与点群を前記部分参照環境点群に位置合わせすることで前記自己位置を精密推定する、
自己位置推定システム。
【請求項6】
請求項1に記載の自己位置推定システムであって、
前記近距離点群及び前記遠距離点群は、何れも、車両の進行方向前方を測距して得られる点群である、
自己位置推定システム。
【請求項7】
請求項1に記載の自己位置推定システムであって、
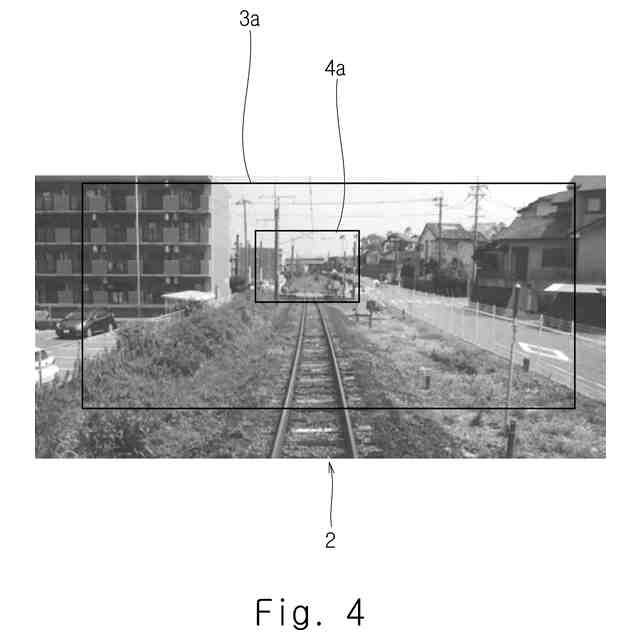
前記近距離点群の視野と前記遠距離点群の視野は、互いに重複している、
自己位置推定システム。
【請求項8】
自己位置推定用の参照環境点群を記憶する参照環境点群記憶手段と、
広視野の近距離点群と、前記近距離点群よりも遠方で且つ狭視野の遠距離点群と、を取得する点群取得手段と、
前記近距離点群を前記参照環境点群に位置合わせすることで自己位置を粗推定する粗推定手段と、
前記粗推定手段による粗推定結果を初期条件として、前記遠距離点群を前記参照環境点群に位置合わせすることで前記自己位置を精密推定する精密推定手段と、
を含む、
自己位置推定装置。
【請求項9】
自己位置推定用の参照環境点群を記憶し、
広視野の近距離点群と、前記近距離点群よりも遠方で且つ狭視野の遠距離点群と、を取得し、
前記近距離点群を前記参照環境点群に位置合わせすることで自己位置を粗推定し、
前記粗推定の粗推定結果を初期条件として、前記遠距離点群を前記参照環境点群に位置合わせすることで前記自己位置を精密推定する、
自己位置推定方法。
【請求項10】
コンピュータに、
請求項9に記載の自己位置推定方法を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自己位置推定システム、自己位置推定装置、自己位置推定方法、及び、プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、第1のLiDAR(Light Detection And Ranging)及び第2のLiDARを含むセンサユニットを備えた自律走行型車両を開示している。具体的には、第1のLiDARは、車両から100メートル程度離れたオブジェクトを検出するのに用いられる。第1のLiDARは、水平角が360度であり垂直角が20度のFoV(Field of View)で測距するように構成される。一方、第2のLiDARは、車両から300メートル程度離れたオブジェクトを検出するのに用いられる。第2のLiDARは、水平角が8度であり垂直角が15度のFoVで測距するように構成される。車両は、第1のLiDARから出力される点群と第2のLiDARから出力される点群に基づいて自律走行する。
【先行技術文献】
【特許文献】
【0003】
特開2018-049014号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動車の自動運転技術の分野においては、LiDAR点群を用いたSLAM(Simultaneous Localization and Mapping)が実用化されつつある。鉄道の分野においても同様にSLAMを用いた自動運転の実用化が期待されている。
【0005】
例えば時速100キロメートル以上で走行する列車の自動運転を実現するには、前方の障害物を検知して安全に停止できる制動距離を考慮すると、典型的には列車の500メートル以上前方を監視する必要がある。このように遠方を監視には前述のSLAMを用いて列車の進行方向前方の環境の三次元マップを遠方まで高精度に再構築することが求められる。
【0006】
SLAMを用いて三次元マップを高精度に再構築するには、列車に搭載されたLiDAR装置から取得したLiDAR点群を列車の移動に応じて高精度に位置補正することが欠かせない。なぜなら、三次元マップは、適切に位置補正されたLiDAR点群を幾度となく重ね合わせて再構築されるからである。また、そもそもLiDAR装置から出力されるLiDAR点群の座標値は、三次元マップのマップ座標系ではなく、LiDAR装置に固定されたLiDAR座標系で表現されるからである。そして、上記の高精度な位置補正を実現するには、そもそも、三次元マップのマップ座標系におけるLiDAR座標系の位置を高精度に推定しなければならない。ここで、LiDAR座標系の位置を推定することは、一般的に、自己位置推定と呼ばれている。また、三次元マップのマップ座標系におけるLiDAR座標系の位置は、三軸並進成分と三軸回転成分から構成される。
【0007】
しかしながら、LiDAR装置の特性上、LiDAR装置から遠方のLiDAR点群の点群密度は相対的に低い。従って、LiDAR装置から遠方のLiDAR点群を用いて自己位置を高い精度で推定することは相当困難である。
【0008】
これに対し、LiDAR装置のFoVを絞ることで、LiDAR装置から遠方のLiDAR点群の点群密度を高めることが考えられる。しかしながら、この場合、LiDAR点群が極めて小さな塊となることから、LiDAR点群をリファレンス点群に位置合わせする位置合わせ(Registration)演算が誤った解に収束する虞があり、上記同様に、高精度な自己位置推定が困難となるだろう。
【0009】
以上のことから、SLAMを用いて列車の進行方向前方の環境の三次元マップを遠方まで高精度に再構築することは容易ではない。従って、列車の進行方向前方を遠方まで十分に監視することができなかった。
【0010】
そこで、本開示の目的は、遠距離点群を用いた高精度な自己位置推定技術を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
高位合成装置
3日前
日本電気株式会社
学習装置および学習方法
4日前
日本電気株式会社
属性特定装置および属性特定方法
4日前
日本電気株式会社
処理装置、処理方法、及びプログラム
3日前
日本電気株式会社
評価装置、評価方法、およびプログラム
18日前
日本電気株式会社
可変イコライザ、中継器、および等価方法
3日前
日本電気株式会社
サーバ、サーバの制御方法、及びプログラム
16日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
10日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
日本電気株式会社
情報出力装置、情報出力方法、及びプログラム
3日前
日本電気株式会社
端末、システム、端末の制御方法及びプログラム
16日前
日本電気株式会社
デルタシグマ変調装置及びデルタシグマ変調方法
9日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
9日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
17日前
日本電気株式会社
管理装置、表示システム、表示方法及びプログラム
3日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
2日前
日本電気株式会社
サービス提供装置、サービス提供方法及びプログラム
10日前
日本電気株式会社
偏波状態監視装置、偏波状態監視方法、及びプログラム
17日前
日本電気株式会社
食事提案装置、食事提案方法、及び食事提案プログラム
16日前
日本電気株式会社
制御装置、検出システム、制御方法、およびプログラム
2日前
日本電気株式会社
サーバ装置、システム、サーバ装置の制御方法及びプログラム
3日前
日本電気株式会社
情報処理装置、情報処理装置の制御方法、及び、制御プログラム
18日前
日本電気株式会社
基地局無線装置、情報処理方法、及び、コンピュータプログラム
5日前
日本電気株式会社
情報処理装置、情報処理装置の制御方法、及び、制御プログラム
18日前
日本電気株式会社
車両振動抽出システム、車両振動抽出装置、及び車両振動抽出方法
5日前
日本電気株式会社
ソフトウェア検査装置、ソフトウェア検査方法、及び、プログラム
4日前
日本電気株式会社
暗号化装置、最適化システム、暗号化方法および暗号化プログラム
3日前
日本電気株式会社
情報処理装置、コンテンツ生成システム、制御方法、および制御プログラム
5日前
日本電気株式会社
情報処理装置、相互見守り方法、制御プログラム、および相互見守りシステム
3日前
日本電気株式会社
情報処理装置、相互見守り方法、制御プログラム、および相互見守りシステム
3日前
日本電気株式会社
自己位置推定システム、自己位置推定装置、自己位置推定方法、及び、プログラム
4日前
日本電気株式会社
監視装置、監視方法及びプログラム
18日前
日本電気株式会社
端末装置、ネットワーク装置、及び方法
9日前
日本電気株式会社
情報処理装置、情報処理方法およびプログラム
16日前
日本電気株式会社
情報処理システム、情報処理方法及びプログラム
9日前
日本電気株式会社
画像処理システム、画像処理方法及びプログラム
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ