TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075319
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186389
出願日
2023-10-31
発明の名称
移動体制御装置、移動体制御システム、自動搬送システムおよび移動体制御方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G05D
1/43 20240101AFI20250508BHJP(制御;調整)
要約
【課題】規定経路を走行する移動体について、規定経路上に障害物がある場合に、走行経路を規定経路から規定経路外に切り替えて障害物を回避することができる移動体制御装置、移動体制御システム、自動搬送システムおよび移動体制御方法を得る。
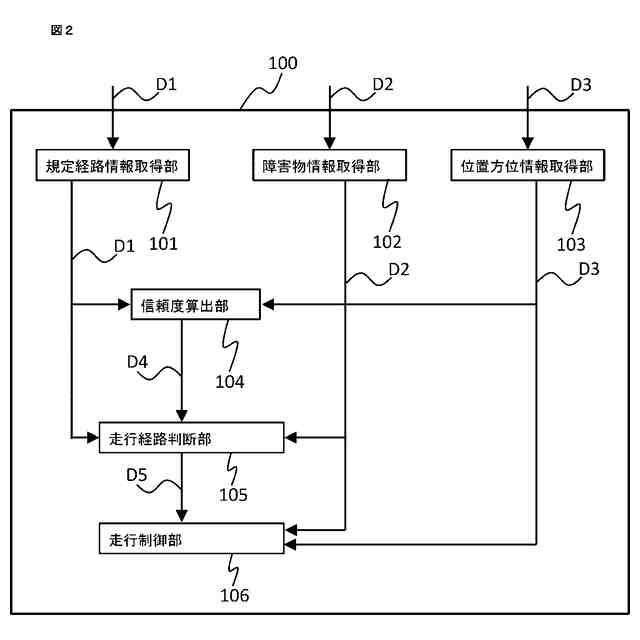
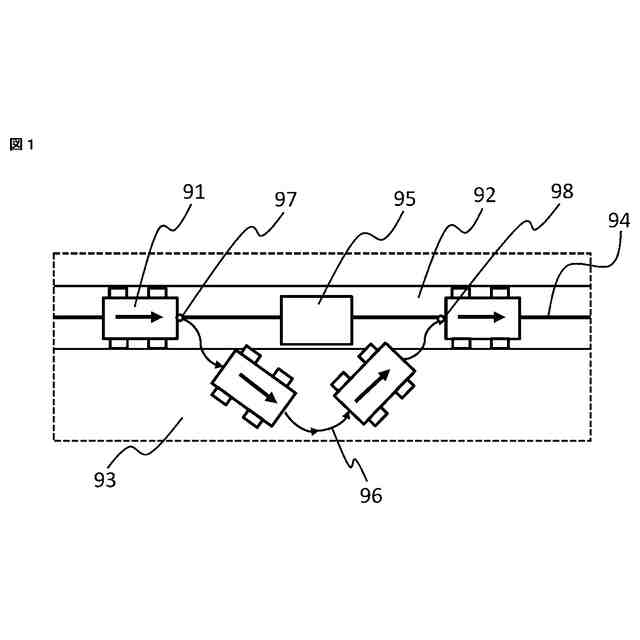
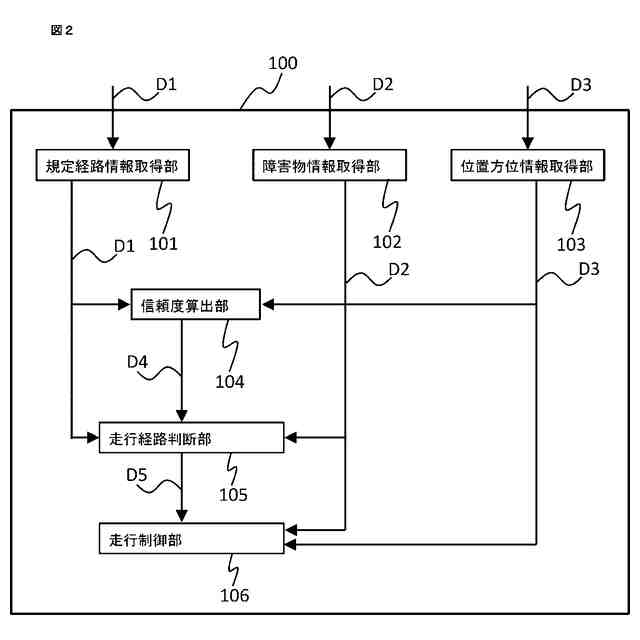
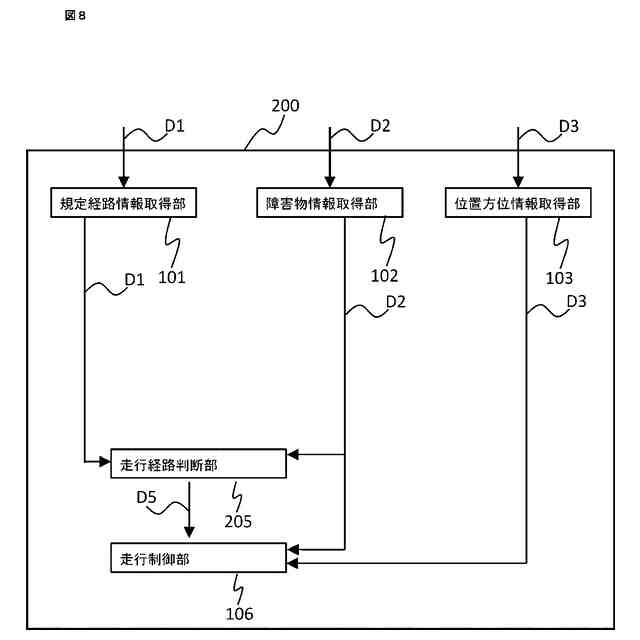
【解決手段】移動体制御装置100は、規定経路情報D1を取得する規定経路情報取得部101と、障害物情報D2を取得する障害物情報取得部102と、位置方位情報D3を取得する位置方位情報取得部103と、車両91が規定経路92を走行しているか否かの判定をするとともに、車両91が障害物95に衝突をする可能性があるか否かの判定をし、衝突をする可能性があると判定した場合に、車両91に規定経路外走行経路96を走行させるか否かの判断をする走行経路判断部105とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
制御対象の移動体が規定経路を走行しているか否かを示す、規定経路情報を取得する規定経路情報取得部と、
前記規定経路における障害物の有無を含む、該障害物についての情報である障害物情報を取得する障害物情報取得部と、
前記移動体の位置および方位を示す位置方位情報を取得する位置方位情報取得部と、
前記移動体が前記規定経路を走行しているか否かの判定を前記規定経路情報に基づいてするとともに、前記移動体が前記障害物に衝突をする可能性があるか否かの判定をし、前記衝突をする可能性があると判定した場合に、前記移動体の走行経路を前記規定経路から切り替え、前記移動体に、前記規定経路とは別の走行経路を走行させるか否かの判断をする走行経路判断部とを備えたことを特徴とする移動体制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記移動体の位置と前記規定経路の位置との関係に基づいて前記位置方位情報の信頼度を算出する信頼度算出部をさらに備え、
前記走行経路判断部は、前記信頼度が予め定められた値よりも大きい場合に、前記移動体に前記別の走行経路を走行させ、前記信頼度が予め定められた値以下の場合に、前記移動体に前記規定経路を走行させると判断し、前記走行経路判断部の判断により前記別の走行経路を前記移動体に走行させる場合に、前記位置方位情報に基づいて前記移動体の走行を制御する請求項1に記載の移動体制御装置。
【請求項3】
前記信頼度算出部は、前記位置方位情報に基づく前記移動体の位置と、前記規定経路情報に基づく前記規定経路の位置との差分に基づいて前記信頼度を算出する請求項2に記載の移動体制御装置。
【請求項4】
前記位置方位情報取得部は、汎地球航法衛星システムによる測位情報から前記位置方位情報を取得し、前記信頼度算出部は、前記移動体が前記別の走行経路を走行中に、前記汎地球航法衛星システムに係る衛星数、DOP、位置の誤差、方位の誤差、および前記汎地球航法衛星システムに係る航法信号のS/N比のうちの少なくとも1つに基づいて前記信頼度を算出する請求項3に記載の移動体制御装置。
【請求項5】
前記障害物情報は、前記障害物の移動に関する情報を含む請求項1から4のいずれか1項に記載の移動体制御装置。
【請求項6】
制御対象の移動体に備えられた、請求項1から4のいずれか1項に記載の移動体制御装置と、
前記移動体制御装置に設けられた障害物情報取得部とは異なる角度から前記障害物情報を取得する第2の障害物情報取得部と、
前記第2の障害物情報取得部により取得された障害物情報を収集し、収集した該障害物情報を障害物詳細情報として出力する障害物詳細情報取得部とを備え、
前記走行経路判断部は、前記移動体に前記別の走行経路を走行させて前記障害物を回避させた場合に前記移動体が前記規定経路に復帰ができるか否かを前記障害物詳細情報に基づいて判定し、前記復帰ができないと判定した場合は前記規定経路を前記移動体の走行経路と判断することを特徴とする移動体制御システム。
【請求項7】
搬送機能を有し制御対象である移動体に備えられた、請求項1から4のいずれか1項に記載の移動体制御装置と、
前記移動体の走行スケジュールを生成し、前記走行スケジュールに応じた制御指令を前記移動体に送信する上位制御部を有する管理サーバとを備えたことを特徴とする自動搬送システム。
【請求項8】
前記移動体制御装置に設けられた障害物情報取得部とは異なる角度から前記障害物情報を取得する第2の障害物情報取得部と、
前記第2の障害物情報取得部により取得された障害物情報を収集し、収集した該障害物情報を障害物詳細情報として出力する障害物詳細情報取得部とを備え、
前記走行経路判断部は、前記移動体に前記別の走行経路を走行させて前記障害物を回避させた場合に前記移動体が前記規定経路に復帰ができるか否かを前記障害物詳細情報に基づいて判定し、前記復帰ができないと判定した場合は前記規定経路を前記移動体の走行経路と判断する請求項7に記載の自動搬送システム。
【請求項9】
制御対象の移動体が規定経路を走行しているか否かを示す、規定経路情報を取得する規定経路情報取得工程と、
前記規定経路における障害物の有無を含む、該障害物についての情報である障害物情報を取得する障害物情報取得工程と、
前記移動体の位置および方位を示す位置方位情報を取得する位置方位情報取得工程と、
前記移動体が前記規定経路を走行しているか否かの判定を前記規定経路情報に基づいてするとともに、前記移動体が前記障害物に衝突をする可能性があるか否かの判定をし、前記衝突をする可能性があると判定した場合に、前記移動体の走行経路を前記規定経路から切り替え、前記移動体に、前記規定経路とは別の走行経路を走行させるか否かの判断をする走行経路判断工程とを備えたことを特徴とする移動体制御方法。
【請求項10】
前記移動体の位置と前記規定経路の位置との関係に基づいて前記位置方位情報の信頼度を算出する信頼度算出工程をさらに備え、
前記走行経路判断工程において、前記信頼度が予め定められた値よりも大きい場合に、前記移動体に前記別の走行経路を走行させ、前記信頼度が予め定められた値以下の場合に、前記移動体に前記規定経路を走行させると判断し、前記走行経路判断工程における判断により前記別の走行経路を前記移動体に走行させる場合に、前記位置方位情報に基づいて前記移動体の走行を制御する請求項9に記載の移動体制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体制御装置、移動体制御システム、自動搬送システムおよび移動体制御方法に関するものである。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
工場または一般道などにおいて車両などの移動体を走行させる手法として、経路誘導方式がある。経路誘導方式では、予め定められた規定経路に沿って電磁誘導線または磁気マーカが地中に埋設されており、移動体は電磁誘導線等にガイドされることで上記規定経路上を走行する。
特許文献1では、断線等により電磁誘導線が使用できなくなった場合に、事前に取得した路面テクスチャ情報と使用中路面テクスチャ情報に基づいて規定経路を走行することを可能にしている。
また、特許文献2では、移動体の速度を実走行距離に基づいて制御するにあたり、規定経路の路面に埋設された磁気マーカを利用している。すなわち、規定経路の走行中において、車輪の回転に関連する物理量から実走行距離を推定した後、規定経路の路面に埋設された磁気マーカを利用して実走行距離の推定値を補正し、補正された実走行距離に基づいて移動体の制御量を決定する。これにより、既存の磁気マーカの除去および再設置をすることなく、移動体の速度を指令する位置を自由に変更することが可能となっている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/054438号
国際公開第2019/026921号
【発明の概要】
【発明が解決しようとする課題】
【0004】
規定経路上に障害物がある場合、この障害物を回避するため、少なくとも一時的に、移動体が規定経路外を走行する必要が生じる。しかしながら、このような動作の実現は、上記各特許文献の技術では困難な点がある。例えば特許文献1の技術では、路面のテクスチャ情報を利用するが、規定経路上と異なり、規定経路外では必要な路面テクスチャ情報が膨大になり路面テクスチャ情報の取得および処理に係る負荷が過大になるおそれがある。仮に規定経路を予め複数設定する場合であっても、規定経路上に障害物が置かれる時期および具体的な場所を事前に把握できるとは限らない。このため、障害物の位置を含む路面テクスチャ情報を事前に取得し、規定経路上の障害物に対応して適切な走行経路(規定経路外を含む)を選択することは困難であり、規定経路上に障害物がある場合に、走行経路を切り替えて障害物を回避することは困難である。また特許文献2の技術では、規定経路外には磁気マーカが埋設されておらず、規定経路上の場合のように実走行距離の推定値を補正することができない。このため、規定経路外では、補正された実走行距離に基づいて移動体の制御量を決定することができない。仮に規定経路を予め複数設定する場合であっても特許文献1の場合と同様の問題が生じる。すなわち、事前に障害物に対応して磁気マーカを埋設することは困難であるため、規定経路上の障害物に対応して適切な走行経路(規定経路外を含む)を選択することは困難であり、規定経路上に障害物がある場合に、走行経路を切り替えて障害物を回避することは困難である。
本開示は、上記のような課題を解決するための技術を開示するものであり、規定経路を走行する移動体について、規定経路上に障害物がある場合に、走行経路を規定経路から規定経路外に切り替えて障害物を回避することができる移動体制御装置、移動体制御システム、自動搬送システムおよび移動体制御方法を得ることを目的とする。
【課題を解決するための手段】
【0005】
本開示の移動体制御装置は、制御対象の移動体が規定経路を走行しているか否かを示す、規定経路情報を取得する規定経路情報取得部と、規定経路における障害物の有無を含む、該障害物についての情報である障害物情報を取得する障害物情報取得部と、移動体の位置および方位を示す位置方位情報を取得する位置方位情報取得部と、移動体が規定経路を走行しているか否かの判定を規定経路情報に基づいてするとともに、移動体が障害物に衝突をする可能性があるか否かの判定をし、衝突をする可能性があると判定した場合に、移動体の走行経路を規定経路から切り替え、移動体に、規定経路とは別の走行経路を走行させるか否かの判断をする走行経路判断部とを備えたものである。
【0006】
また、本開示の移動体制御方法は、制御対象の移動体が規定経路を走行しているか否かを示す、規定経路情報を取得する規定経路情報取得工程と、規定経路における障害物の有無を含む、該障害物についての情報である障害物情報を取得する障害物情報取得工程と、移動体の位置および方位を示す位置方位情報を取得する位置方位情報取得工程と、移動体が規定経路を走行しているか否かの判定を規定経路情報に基づいてするとともに、移動体が障害物に衝突をする可能性があるか否かの判定をし、衝突をする可能性があると判定した場合に、移動体の走行経路を規定経路から切り替え、移動体に、規定経路とは別の走行経路を走行させるか否かの判断をする走行経路判断工程とを備えたものである。
【発明の効果】
【0007】
本開示の移動体制御装置、移動体制御システム、自動搬送システムまたは移動体制御方法によれば、規定経路を走行する移動体について、規定経路上に障害物がある場合に、走行経路を規定経路から規定経路外に切り替えて障害物を回避することができる。
【図面の簡単な説明】
【0008】
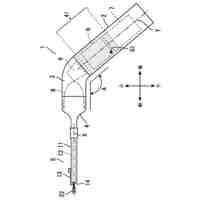
実施の形態1に係る車両の走行経路について説明する図である。
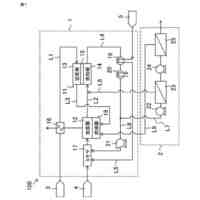
実施の形態1における移動体制御装置を示す機能ブロック図である。
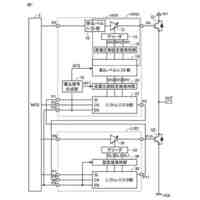
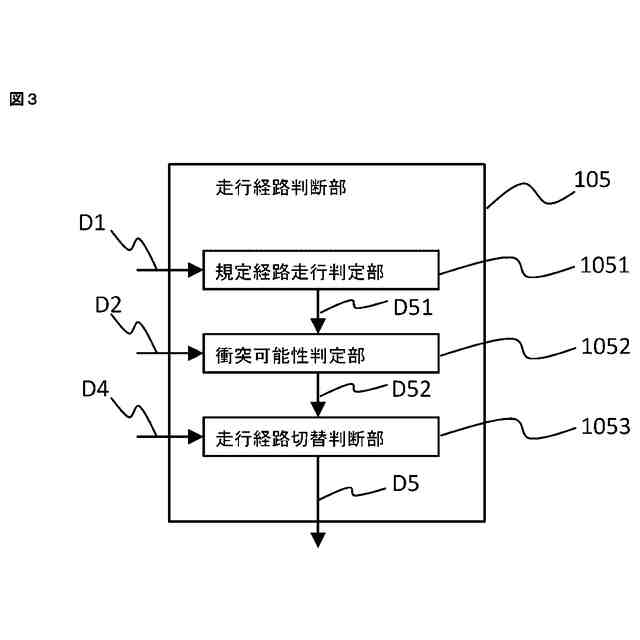
実施の形態1に係る走行経路判断部を示す機能ブロック図である。
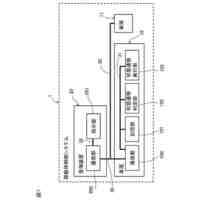
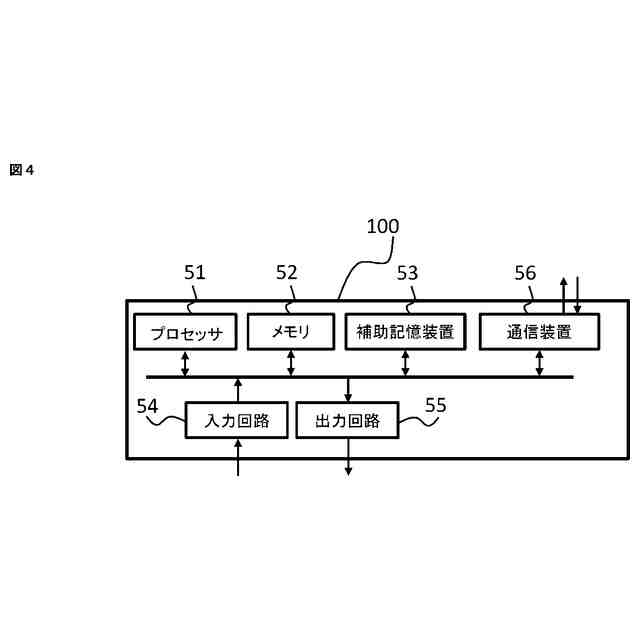
実施の形態1における移動体制御装置のハードウェア構成の例を示す図である。
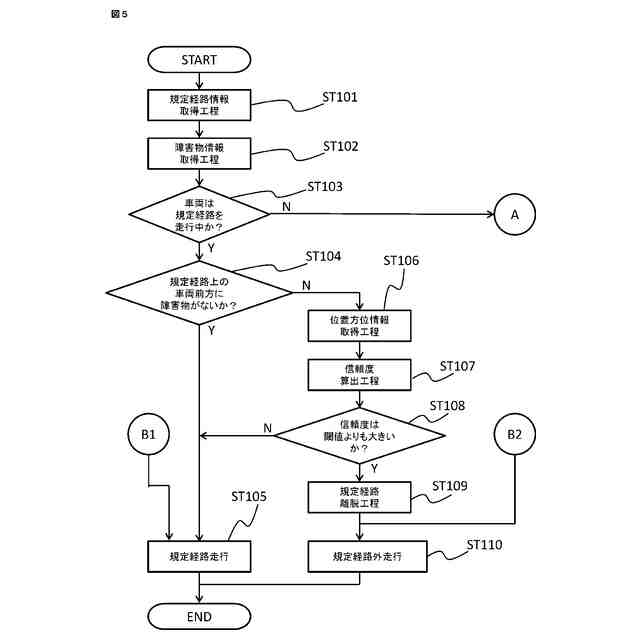
実施の形態1における移動体制御装置の動作を示すフロー図である。
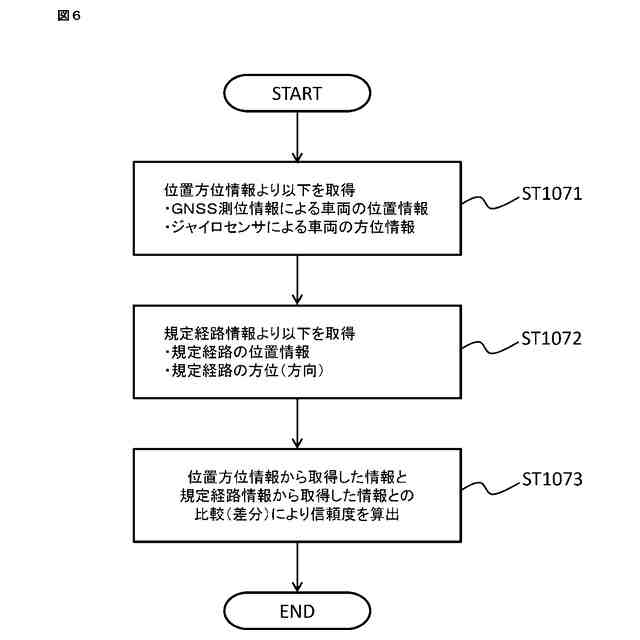
実施の形態1に係る信頼度算出工程を示すフロー図である。
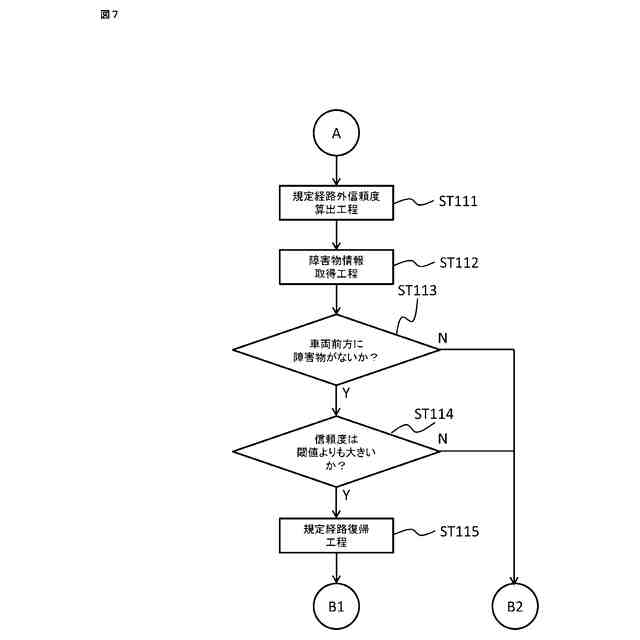
実施の形態1に係る規定経路外走行における動作を示すフロー図である。
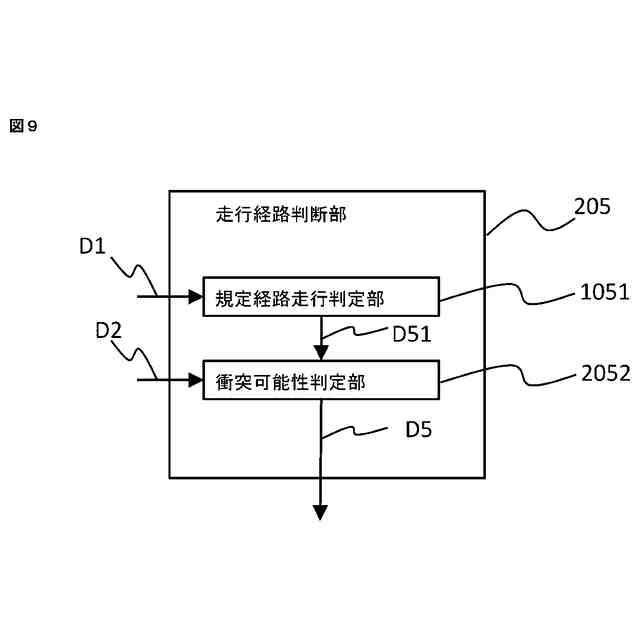
実施の形態2における移動体制御装置を示す機能ブロック図である。
実施の形態2に係る走行経路判断部を示す機能ブロック図である。
実施の形態2における移動体制御装置の動作を示すフロー図である。
実施の形態2に係る規定経路外走行における動作を示すフロー図である。
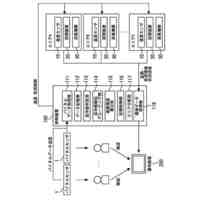
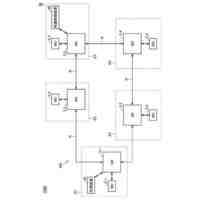
実施の形態3における移動体制御システムの概要を示す図である。
実施の形態3における移動体制御システムを示す機能ブロック図である。
実施の形態3に係る走行経路判断部を示す機能ブロック図である。
実施の形態3における移動体制御装システムの動作を示すフロー図である。
実施の形態3の変形例における移動体制御システムを示す機能ブロック図である。
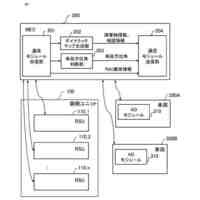
実施の形態4における自動搬送システムの概要を示す図である。
実施の形態4に係る管理サーバを示す機能ブロック図である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下に、実施の形態1を図1から図7に基づいて説明する。まず、実施の形態1の移動体制御装置の概要を説明する。本開示の移動体制御装置は、工場などの特定のエリア、または一般道が含まれるエリアで運用され、予め定められた規定経路を走行する車両、すなわち移動体に搭載され、車両の走行を制御する。車両は、通常は規定経路を走行するが、規定経路上に障害物があり、車両の走行がこの障害物により走行が妨げられる場合、少なくとも一時的に、車両は規定経路外を走行し、障害物を回避する。
【0010】
なお、本開示の各実施の形態における「移動体」は、規定経路または規定経路外を走行することが可能な移動体であり、例えばゴルフカート、自動車、自動運転バス、運搬車、小型自動電動車両等が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送風機
17日前
三菱電機株式会社
冷蔵庫
3日前
三菱電機株式会社
電子機器
10日前
三菱電機株式会社
照明器具
6日前
三菱電機株式会社
照明器具
18日前
三菱電機株式会社
放電装置
25日前
三菱電機株式会社
発光装置
25日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
加熱調理器
19日前
三菱電機株式会社
半導体装置
5日前
三菱電機株式会社
光通信装置
25日前
三菱電機株式会社
加熱調理器
今日
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
電気掃除機
今日
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
電力変換装置
7日前
三菱電機株式会社
照明システム
5日前
三菱電機株式会社
給湯システム
7日前
三菱電機株式会社
空調システム
17日前
三菱電機株式会社
非可逆回路素子
今日
三菱電機株式会社
見守りシステム
6日前
三菱電機株式会社
半導体製造装置
1か月前
三菱電機株式会社
自動運転システム
7日前
三菱電機株式会社
燃料電池システム
6日前
三菱電機株式会社
自己位置推定装置
6日前
三菱電機株式会社
半導体モジュール
1か月前
三菱電機株式会社
アレーアンテナ装置
18日前
三菱電機株式会社
手持ち式電気掃除機
18日前
三菱電機株式会社
モータ及び送風装置
17日前
三菱電機株式会社
移動体制御システム
7日前
三菱電機株式会社
保護リレーシステム
1か月前
三菱電機株式会社
水位変化検出システム
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ