TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079843
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023192668
出願日
2023-11-13
発明の名称
監視装置および監視方法
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G01S
13/50 20060101AFI20250516BHJP(測定;試験)
要約
【課題】従来に対して精度よく、室内または室外のうちの少なくとも一方における動体の有無に関する監視を可能とする。
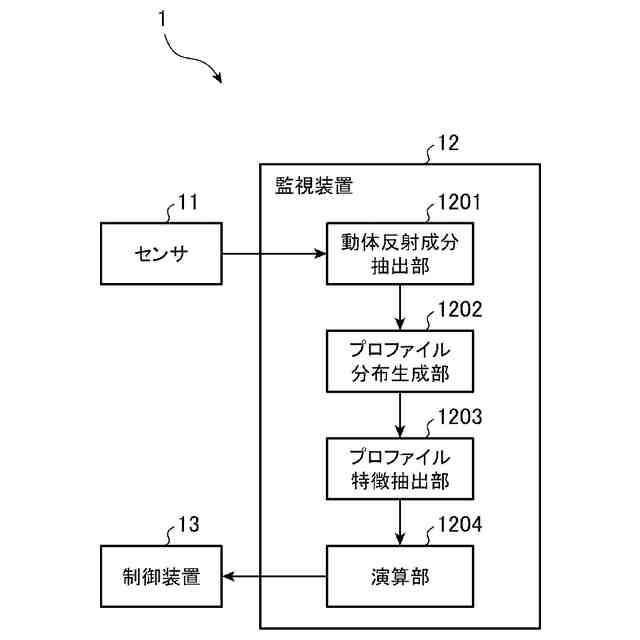
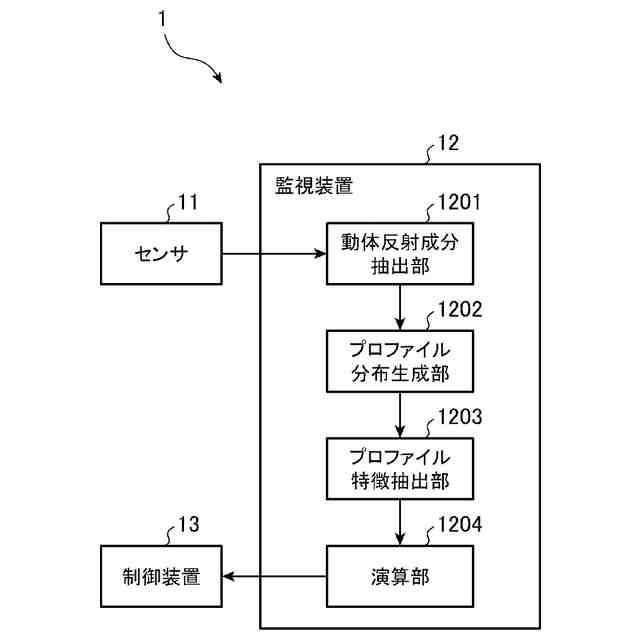
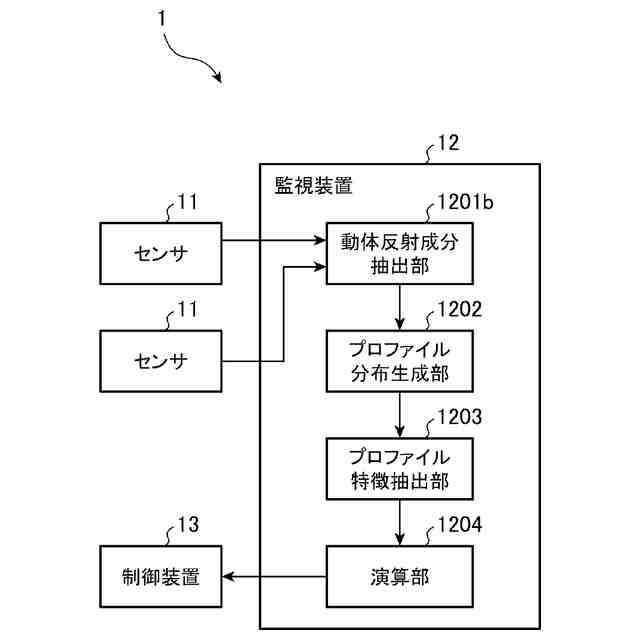
【解決手段】センサ11により受信された信号から、動体による反射成分を抽出する動体反射成分抽出部1201と、動体反射成分抽出部1201により抽出された動体による反射成分に基づいて、当該動体による反射成分の受信強度と伝搬距離または伝搬遅延時間との関係を示す波形であるプロファイル分布を生成するプロファイル分布生成部1202と、プロファイル分布生成部1202により生成されたプロファイル分布に基づいて、当該プロファイル分布の波形形状に関する特徴量を抽出するプロファイル特徴抽出部1203と、プロファイル特徴抽出部1203により抽出された特徴量または当該特徴量の時系列変化に基づいて、室内または室外のうちの少なくとも一方における動体の有無の検知、あるいは、動体の有無の検知に対する信頼度の算出のうちの少なくとも一方の処理を行う演算部1204とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
信号を送信して動体により反射された信号を受信するセンサにより受信された信号から、動体による反射成分を抽出する動体反射成分抽出部と、
前記動体反射成分抽出部により抽出された動体による反射成分に基づいて、当該動体による反射成分の受信強度と伝搬距離または伝搬遅延時間との関係を示す波形であるプロファイル分布を生成するプロファイル分布生成部と、
前記プロファイル分布生成部により生成されたプロファイル分布に基づいて、当該プロファイル分布の波形形状に関する特徴量を抽出するプロファイル特徴抽出部と、
前記プロファイル特徴抽出部により抽出された特徴量または当該特徴量の時系列変化に基づいて、室内または室外のうちの少なくとも一方における動体の有無の検知、あるいは、動体の有無の検知に対する信頼度の算出のうちの少なくとも一方の処理を行う演算部と
を備えた監視装置。
続きを表示(約 1,100 文字)
【請求項2】
前記動体反射成分抽出部は、複数の前記センサにより受信された信号から、当該信号の到来角度ごとに、動体による反射成分を抽出する
ことを特徴とする請求項1記載の監視装置。
【請求項3】
前記プロファイル特徴抽出部は、前記プロファイル分布生成部により生成されたプロファイル分布に対する周波数解析結果を、特徴量として抽出する
ことを特徴とする請求項1または請求項2記載の監視装置。
【請求項4】
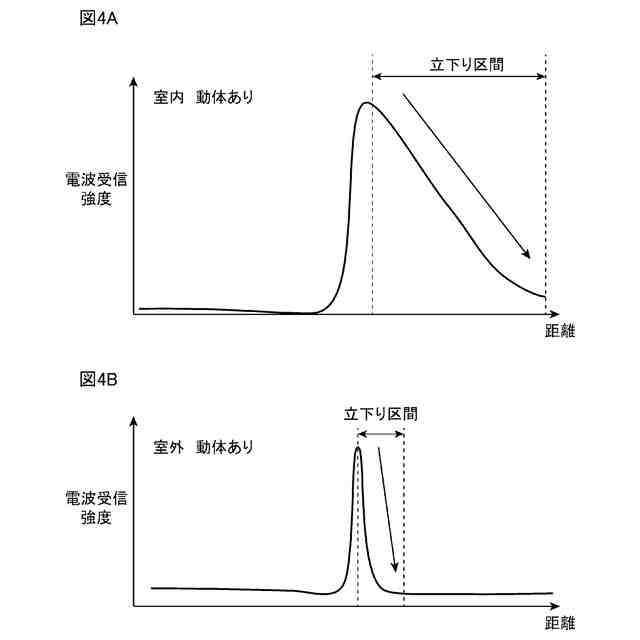
前記プロファイル特徴抽出部は、前記プロファイル分布生成部により生成されたプロファイル分布における立下り区間での勾配を、特徴量として抽出する
ことを特徴とする請求項1または請求項2記載の監視装置。
【請求項5】
前記演算部は、前記プロファイル特徴抽出部により抽出された勾配が、所定値よりも小さい場合には室内に動体が存在すると判定し、所定値よりも大きい場合には室外に動体が存在すると判定する
ことを特徴とする請求項4記載の監視装置。
【請求項6】
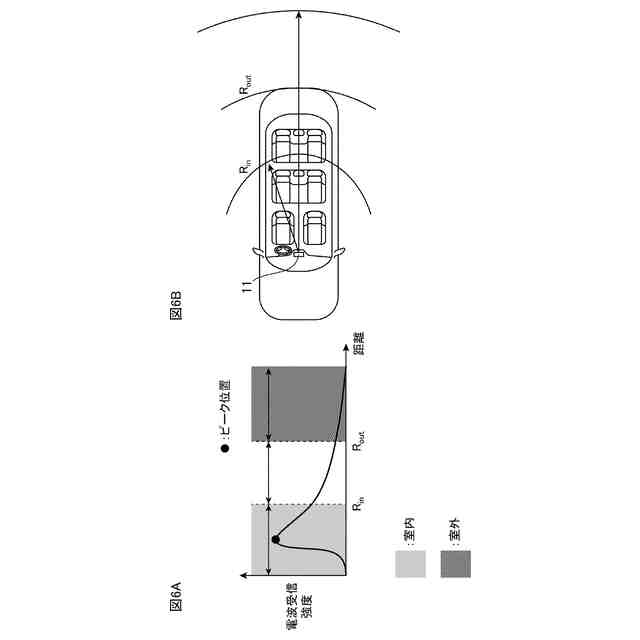
前記プロファイル特徴抽出部は、前記プロファイル分布生成部により生成されたプロファイル分布におけるピーク位置を、特徴量として抽出する
ことを特徴とする請求項1または請求項2記載の監視装置。
【請求項7】
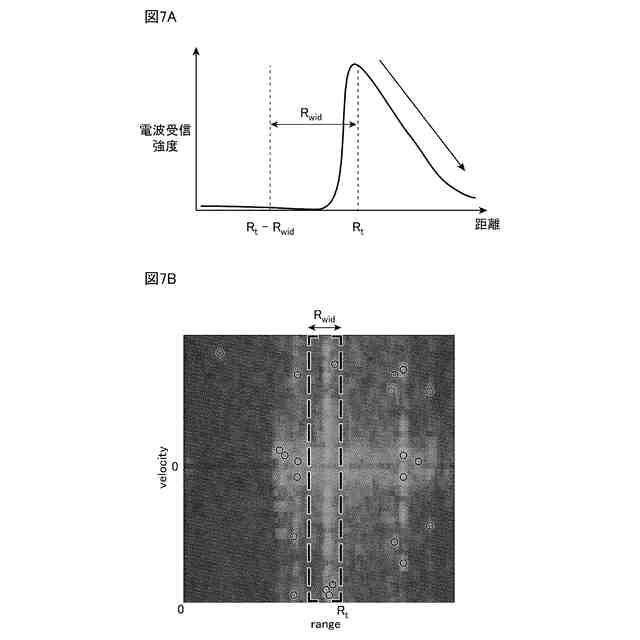
前記プロファイル分布生成部は、プロファイル分布として、動体の速度ごとに、当該動体による反射成分の受信強度と伝搬距離または伝搬遅延時間との関係を示す波形であるプロファイル分布を生成する
ことを特徴とする請求項1または請求項2記載の監視装置。
【請求項8】
前記演算部は、前記プロファイル特徴抽出部により抽出された特徴量に基づいて、動体の有無の検知に対する信頼度を算出する
ことを特徴とする請求項1または請求項2記載の監視装置。
【請求項9】
前記演算部は、前記プロファイル特徴抽出部により抽出された特徴量である、プロファイル分布に対する周波数解析結果、プロファイル分布における立下り区間での勾配、または、プロファイル分布におけるピーク位置のうちの1つ以上に基づいて、動体の有無の検知に対する信頼度を算出する
ことを特徴とする請求項8記載の監視装置。
【請求項10】
前記演算部は、前記プロファイル特徴抽出部により抽出された特徴量の時系列変化に基づいて、動体の有無の検知に対する信頼度を算出する
ことを特徴とする請求項1または請求項2記載の監視装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、室内または室外のうちの少なくとも一方における動体の有無に関する監視を行う監視装置および監視方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、ミリ波レーダなどの電波センサを車室内などの室内空間へ導入し、高齢者の見守りまたは幼児の置き去りの検知などへ利用する動きがある。ミリ波レーダは、カメラと比較して、プライバシー性に優れ、照明または天候による影響を受けにくいといった点で利点がある。
【0003】
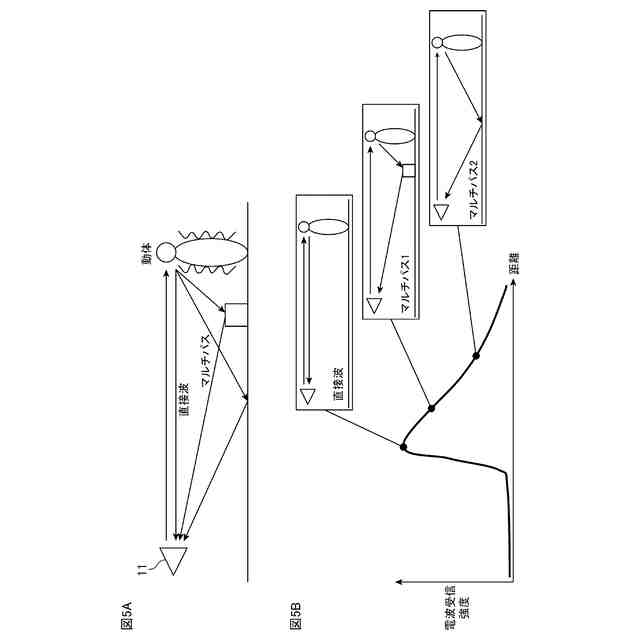
一方、ミリ波レーダで利用する電波には、透過、反射および回析といった性質がある。そのため、ミリ波レーダで室内をセンシングする場合、電波が窓または壁などを透過し、室外にいる人により反射するなどして、誤検知につながるマルチパスが発生する場合がある。こうした現象により、ミリ波レーダが検出した物体が、室内に存在する物体なのか、室外に存在する物体なのかの判別が難しい場合がある。
これは、ミリ波レーダによる車室内センシングにおいては、過検知の要因となり得る。例えば、車室内に人が居なくても幼児置去りと判定し、誤警報を発してしまう可能性がある。
【0004】
これに対し、検出した物体が車内または車外のどちらに存在するかを簡単な構成で判別する技術が知られている(例えば特許文献1参照)。この従来技術では、狭指向性アンテナおよび広指向性アンテナの2つのアンテナを備えている。そして、従来技術では、狭指向性アンテナで電波を出力して受信される信号の受信強度と、広指向性アンテナで電波を出力して受信される信号の受信強度とを比較し、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかを判定する。
【先行技術文献】
【特許文献】
【0005】
特開2010-188855号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術では、狭指向性アンテナと広指向性アンテナのそれぞれのアンテナにより受信された信号の受信強度を比較することで、検出された物体が車内または車外のどちらに存在するかを判定しているため、判定精度が高くない。
また、従来技術では、狭指向性アンテナと広指向性アンテナの2つのアンテナが必要であり、ハードウェア構成が複雑になり、また、これらのアンテナにより受信された信号に対する処理の計算量が増大する。
【0007】
本開示は、上記のような課題を解決するためになされたもので、従来に対して精度よく、室内または室外のうちの少なくとも一方における動体の有無に関する監視が可能となる監視装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本開示に係る監視装置は、信号を送信して動体により反射された信号を受信するセンサにより受信された信号から、動体による反射成分を抽出する動体反射成分抽出部と、動体反射成分抽出部により抽出された動体による反射成分に基づいて、当該動体による反射成分の受信強度と伝搬距離または伝搬遅延時間との関係を示す波形であるプロファイル分布を生成するプロファイル分布生成部と、プロファイル分布生成部により生成されたプロファイル分布に基づいて、当該プロファイル分布の波形形状に関する特徴量を抽出するプロファイル特徴抽出部と、プロファイル特徴抽出部により抽出された特徴量または当該特徴量の時系列変化に基づいて、室内または室外のうちの少なくとも一方における動体の有無の検知、あるいは、動体の有無の検知に対する信頼度の算出のうちの少なくとも一方の処理を行う演算部とを備えたことを特徴とする。
【発明の効果】
【0009】
本開示によれば、上記のように構成したので、従来に対して精度よく、室内または室外のうちの少なくとも一方における動体の有無に関する監視が可能となる。
【図面の簡単な説明】
【0010】
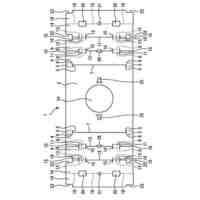
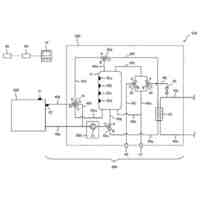
実施の形態1に係る監視装置を備えた監視システムの構成例を示すブロック図である。
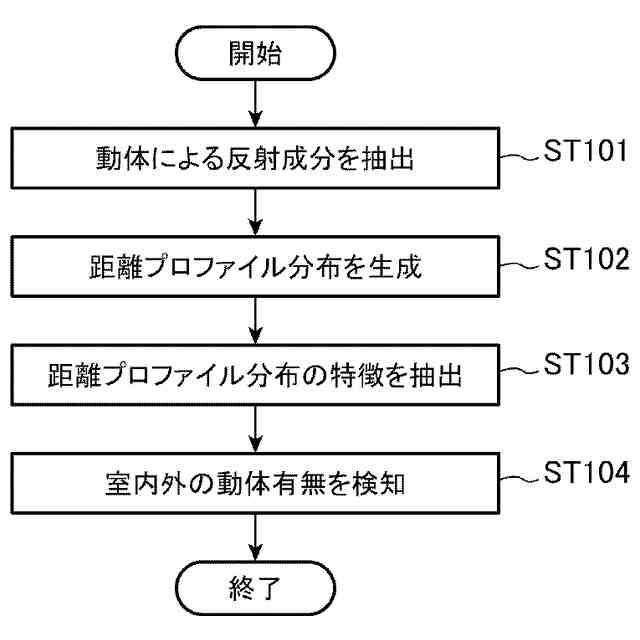
実施の形態1に係る監視装置の動作例を示すフローチャート図である。
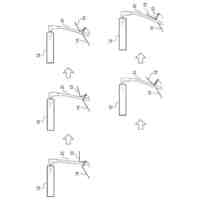
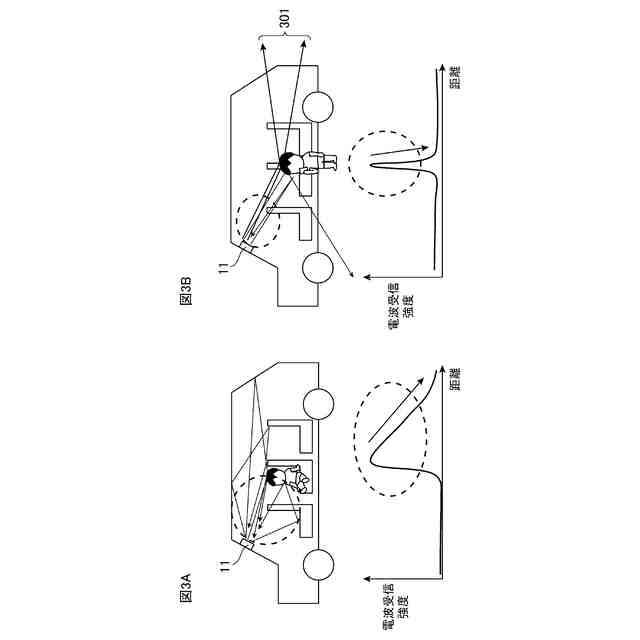
図3Aおよび図3Bは、実施の形態1に係る監視装置の動作例を説明するための図であって、図3Aは室内に動体が存在する場合での電波の送受信および距離プロファイル分布の一例を示す図であり、図3Bは室外に動体が存在する場合での電波の送受信および距離プロファイル分布の一例を示す図である。
図4Aおよび図4Bは、実施の形態1に係る監視装置の動作例を説明するための図であって、図4Aは室内に動体が存在する場合での距離プロファイル分布の一例を示す図であり、図4Bは室外に動体が存在する場合での距離プロファイル分布の一例を示す図である。
図5Aおよび図5Bは、マルチパスを説明するための図である。
図6Aおよび図6Bは、実施の形態1に係る監視装置の動作例を説明するための図であって、図6Aは室内に動体が存在する場合での距離プロファイル分布の一例を示す図であり、図6Bは特徴量がピーク位置である場合に用いられる閾値の一例を示す図である。
図7Aおよび図7Bは、実施の形態1に係る監視装置の動作例を説明するための図であって、図7Aは距離プロファイル分布の一例を示す図であり、図7Bは動体速度ごとの距離プロファイル分布を用いた場合でのピーク位置抽出の一例を示す図である。
実施の形態1における演算部の動作例を説明するための図である。
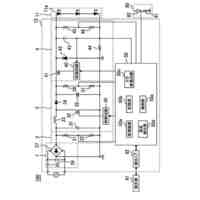
実施の形態2に係る監視装置を備えた監視システムの構成例を示すブロック図である。
実施の形態2に係る監視装置に入力される電波が複数である場合の動作例を説明するための図である。
図11A、図11Bは、実施の形態2に係る監視装置の動作例を説明するための図であって、図11Aは実施の形態1に係る監視装置で得られる距離プロファイル分布の一例を示す図であり、図11Bは実施の形態2に係る監視装置で得られる距離プロファイル分布の一例を示す図である。
実施の形態3に係る監視装置を備えた監視システムの構成例を示すブロック図である。
図13A、図13Bは、実施の形態1~3に係る監視装置のハードウェア構成例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
22日前
三菱電機株式会社
冷蔵庫
4日前
三菱電機株式会社
吸音体
18日前
三菱電機株式会社
送風装置
16日前
三菱電機株式会社
照明装置
9日前
三菱電機株式会社
電子機器
5日前
三菱電機株式会社
照明装置
5日前
三菱電機株式会社
梱包装置
1日前
三菱電機株式会社
照明器具
25日前
三菱電機株式会社
加熱調理器
19日前
三菱電機株式会社
半導体装置
25日前
三菱電機株式会社
半導体装置
25日前
三菱電機株式会社
遠心送風機
18日前
三菱電機株式会社
飛しょう体
18日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
電気掃除機
19日前
三菱電機株式会社
半導体装置
8日前
三菱電機株式会社
給湯システム
2日前
三菱電機株式会社
電力変換装置
26日前
三菱電機株式会社
照明システム
9日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
電力変換装置
12日前
三菱電機株式会社
貯湯式給湯機
8日前
三菱電機株式会社
給湯システム
26日前
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
照明システム
24日前
三菱電機株式会社
制御システム
4日前
三菱電機株式会社
非可逆回路素子
19日前
三菱電機株式会社
電磁ピンセット
4日前
三菱電機株式会社
見守りシステム
25日前
三菱電機株式会社
誘導加熱調理器
18日前
三菱電機株式会社
回転電機制御装置
11日前
三菱電機株式会社
自己位置推定装置
25日前
三菱電機株式会社
自動運転システム
26日前
三菱電機株式会社
燃料電池システム
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ