TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081082
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194604
出願日
2023-11-15
発明の名称
監視装置、監視方法および監視プログラム
出願人
パイオニア株式会社
,
パイオニアシステムテクノロジー株式会社
代理人
個人
主分類
G01S
13/931 20200101AFI20250520BHJP(測定;試験)
要約
【課題】精度高く動体の位置を補間する。
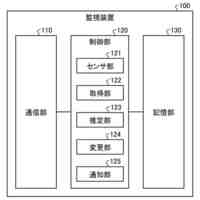
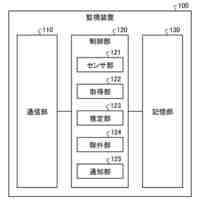
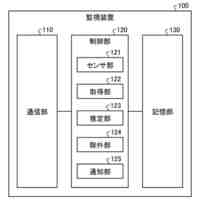
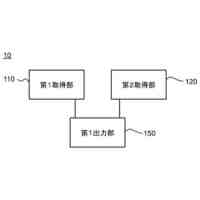
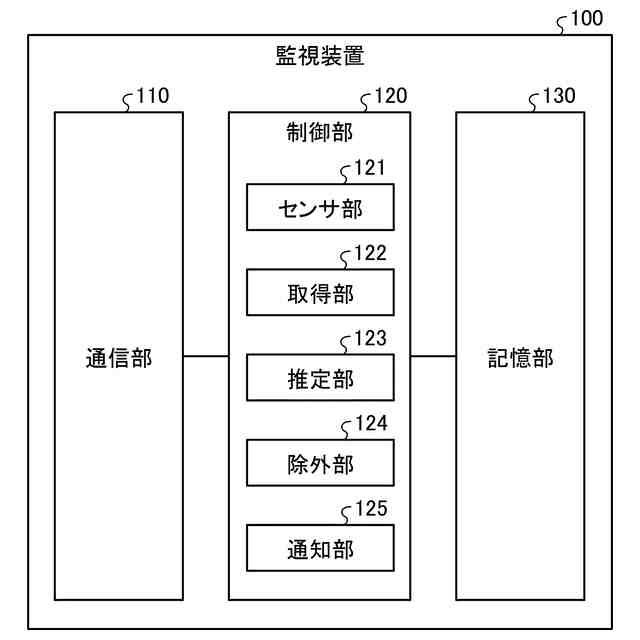
【解決手段】監視装置100は、車両に備えられた動体センサにより検知された情報に基づいて特定された動体の位置を逐次取得する取得部122と、取得部122により取得された動体の座標が無効値となった時点より所定期間前の動体の移動量を用いて、無効値として特定された動体の位置を推定する推定部123とを有することを特徴とする。
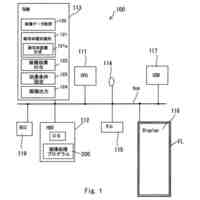
【選択図】図1
特許請求の範囲
【請求項1】
車両に備えられた動体センサにより検知された情報に基づいて特定された動体の位置を逐次取得する取得部と、
前記取得部により取得された前記動体の位置が無効値となった時点より所定期間前の前記動体の移動量を用いて、無効値として特定された前記動体の位置を推定する推定部と
を有することを特徴とする監視装置。
続きを表示(約 1,200 文字)
【請求項2】
前記取得部は、前記動体の位置として前記動体の座標を取得し、
前記推定部は、
前記取得部により取得された前記動体の座標が無効値となった時点より所定期間前の前記動体の移動量を用いて、無効値として特定された前記動体の座標を推定する
ことを特徴とする請求項1に記載の監視装置。
【請求項3】
前記取得部は、
前記動体センサにより検知された信号の強度に基づいて動体の座標を特定し、前記動体センサにより検知された前記信号の強度が閾値以下である場合、前記動体の座標を無効値として特定する
ことを特徴とする請求項2に記載の監視装置。
【請求項4】
前記推定部は、
前記動体の座標が無効値となった時点から所定期間前の前記動体の座標と、前記動体の座標が無効値となった時点より所定期間前の期間における前記動体の単位時間当たりの移動量とから、前記無効値として特定された前記動体の座標を推定する
ことを特徴とする請求項2に記載の監視装置。
【請求項5】
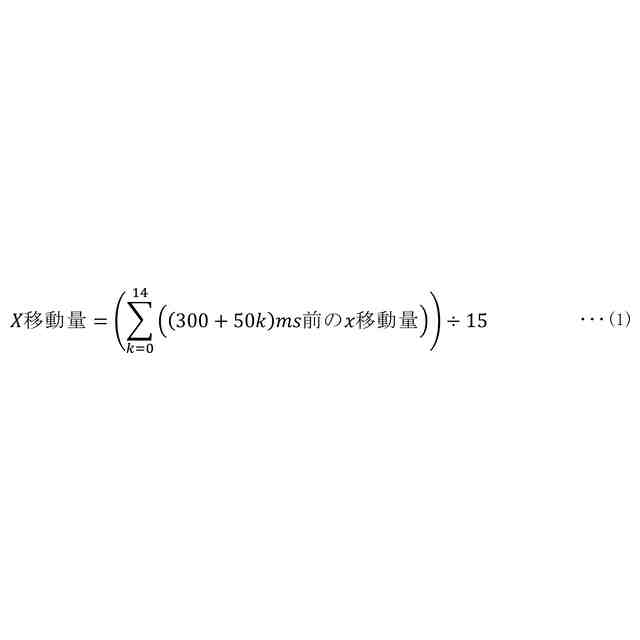
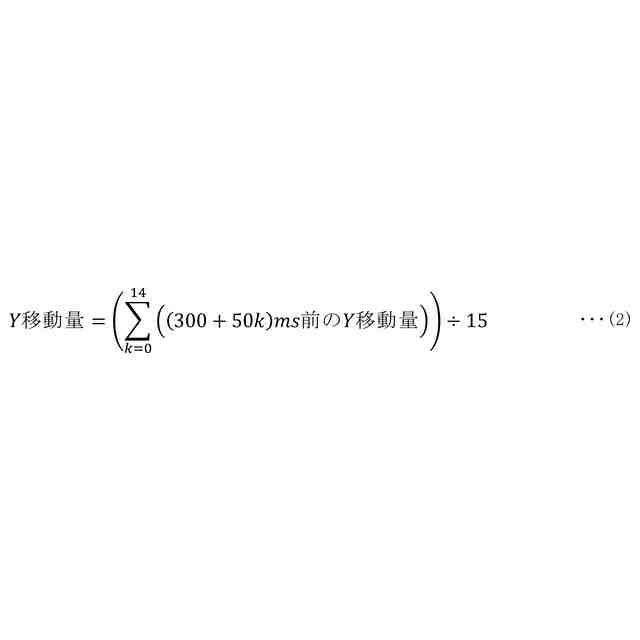
前記動体の単位時間当たりの移動量は、
前記動体の座標が無効値となった時点より所定期間前の期間における動体のY軸における移動量の平均値を、前記動体の座標が無効値となった時点より所定期間前の期間における動体のX軸における移動量の平均値で除算した値である
ことを特徴とする請求項4に記載の監視装置。
【請求項6】
前記推定部は、
前記推定した前記動体の座標と、前記動体の座標が無効値となった時点より所定期間前の期間における前記動体の単位時間当たりの移動量とから、前記無効値として特定された前記動体の座標を推定する
ことを特徴とする請求項4に記載の監視装置。
【請求項7】
前記所定期間は、300msであることを特徴とする請求項1に記載の監視装置。
【請求項8】
前記動体センサの検出範囲外に前記動体が移動したことにより、前記動体の座標が無効値となった場合に、前記動体を推定対象から除外する除外部
をさらに有することを特徴とする請求項1に記載の監視装置。
【請求項9】
前記動体センサが備えられた車両に存在する障害物により生じる前記動体センサの死角の範囲外に前記動体が存在し、前記動体の座標が無効値となった場合、前記動体を推定対象から除外する除外部
をさらに有することを特徴とする請求項1に記載の監視装置。
【請求項10】
車両に備えられた動体センサにより検知された信号の強度に基づいて特定された動体の座標を逐次取得する取得部と、
前記取得部により取得された前記動体の座標のうち、前記信号の強度が閾値以下となった時点より所定期間前の前記動体の座標を用いて、前記信号の強度が閾値以下であった前記動体の座標を推定する推定部と
を有することを特徴とする監視装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視装置、監視方法および監視プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、動体の位置が得られない場合に、動体の位置を過去の動体の位置から推定する技術が存在する。例えば、線形補間法により位置を推定することが可能である。
【先行技術文献】
【非特許文献】
【0003】
内挿/外挿(Interpolation/Extrapolation)とは?[令和5年10月17日検索]、インターネット<https://atmarkit.itmedia.co.jp/ait/articles/2008/26/news017.html>
【発明の概要】
【発明が解決しようとする課題】
【0004】
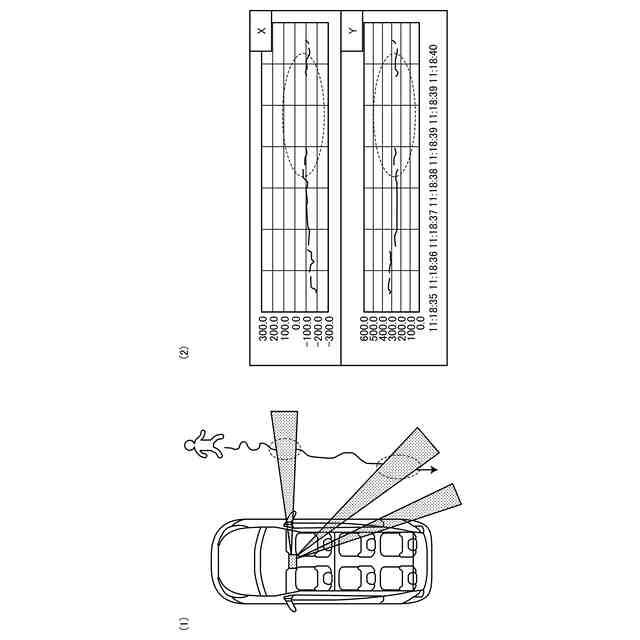
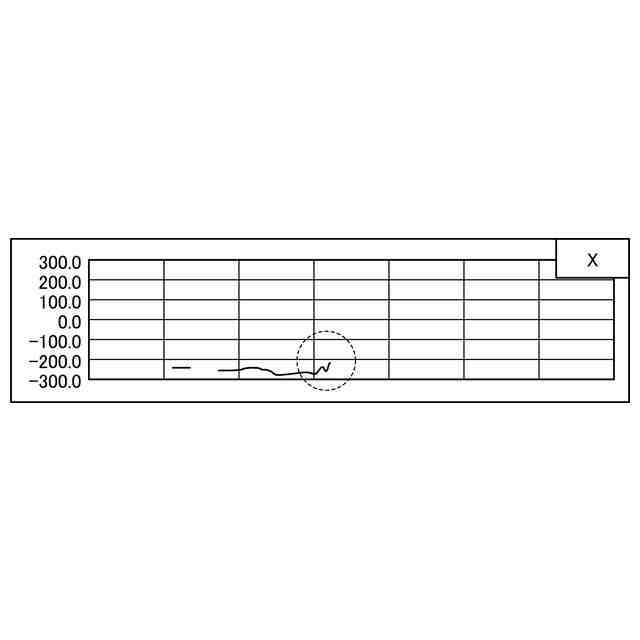
しかしながら、従来技術では、精度高く動体の位置を補間できない場合がある。例えば、動体センサにより検知されている動体が、動体センサの死角に侵入する直前にはノイズが発生し、動体の座標が細かく変動する場合があるため、動体が死角に侵入する直前の動体の座標を用いて補間を行うと実際の動体の座標とは大きく誤った座標を推定してしまう場合がある。このように、本発明が解決しようとする課題としては、上述した問題が一例として挙げられる。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するため、請求項1に記載の発明は、車両に備えられた動体センサにより検知された情報に基づいて特定された動体の位置を逐次取得する取得部と、前記取得部により取得された前記動体の位置が無効値となった時点より所定期間前の前記動体の移動量を用いて、無効値として特定された前記動体の位置を推定する推定部とを有することを特徴とする。
【0006】
請求項10に記載の発明は、車両に備えられた動体センサにより検知された信号の強度に基づいて特定された動体の座標を逐次取得する取得部と、前記取得部により取得された前記動体の座標のうち、前記信号の強度が閾値以下となった時点より所定期間前の前記動体の座標を用いて、前記信号の強度が閾値以下であった前記動体の座標を推定する推定部とを有することを特徴とする。
【0007】
請求項11に記載の発明は、監視装置が実行する方法であって、車両に備えられた動体センサにより検知された情報に基づいて特定された動体の位置を逐次取得する取得工程と、前記取得工程により取得された前記動体の位置のうち、前記動体の位置が無効値となった時点より所定期間前の前記動体の位置を用いて、無効値として特定された前記動体の位置を推定する推定工程とを含むことを特徴とする。
【0008】
請求項12に記載の発明は、車両に備えられた動体センサにより検知された情報に基づいて特定された動体の位置を逐次取得する取得ステップと、前記取得ステップにより取得された前記動体の位置のうち、前記動体の位置が無効値となった時点より所定期間前の前記動体の位置を用いて、無効値として特定された前記動体の位置を推定する推定ステップとをコンピュータに実行させることを特徴とする。
【図面の簡単な説明】
【0009】
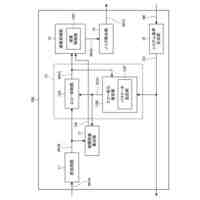
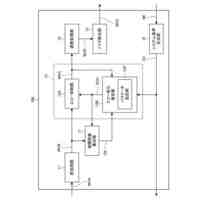
図1は、実施形態に係る監視装置の構成の一例を示す図である。
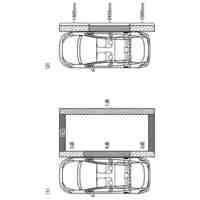
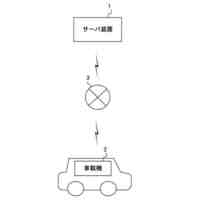
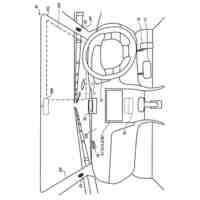
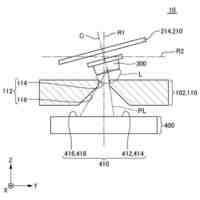
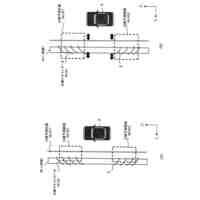
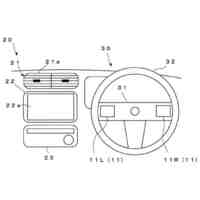
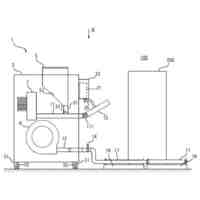
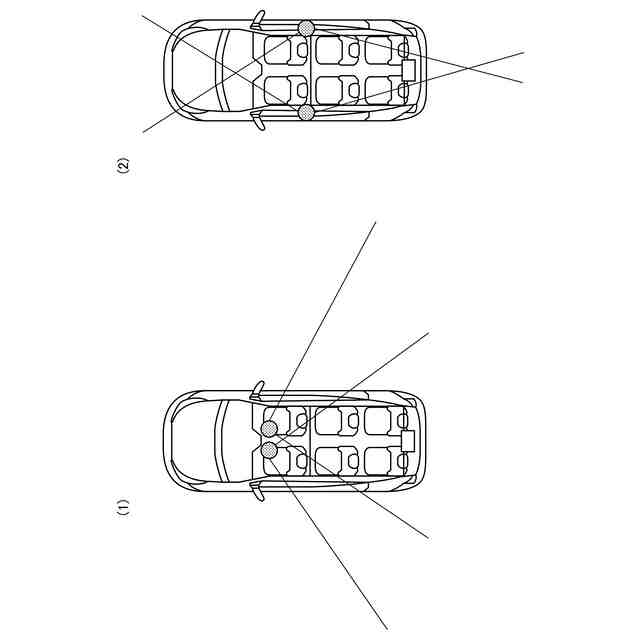
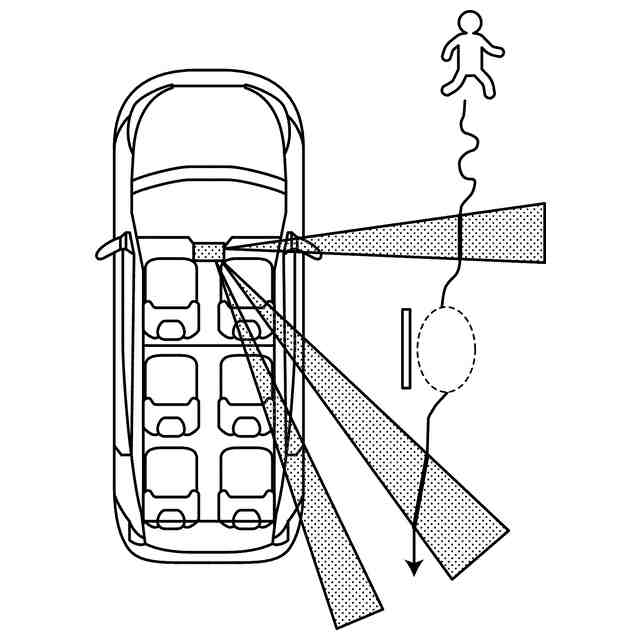
図2は、実施形態に係る動体センサの設置場所の一例を示す図である。
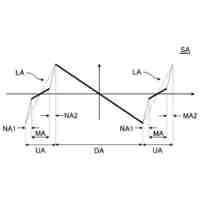
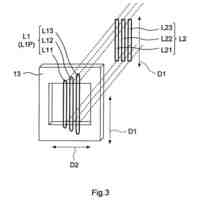
図3は、実施形態に係る監視装置による推定処理の一例を示す図である。
図4は、実施形態に係る監視装置による推定処理の一例を示す図である。
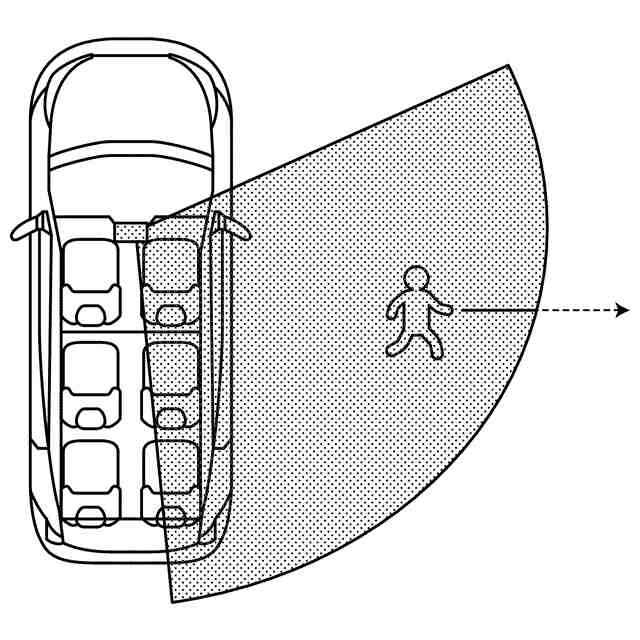
図5は、実施形態に係る監視装置による推定処理の一例を示す図である。
図6は、実施形態に係る監視装置による除外処理の一例を示す図である。
図7は、実施形態に係る監視装置による除外処理の一例を示す図である。
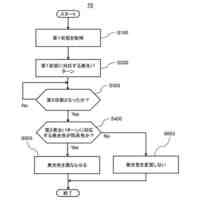
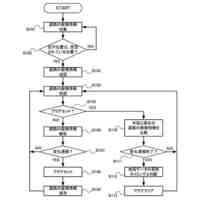
図8は、実施形態に係る監視装置による処理の一例を示すフローチャートである。
図9は、実施形態に係る監視装置による除外処理の一例を示す図である。
図10は、実施形態に係る監視装置による除外処理の一例を示す図である。
図11は、実施形態に係る監視装置による処理の一例を示すフローチャートである。
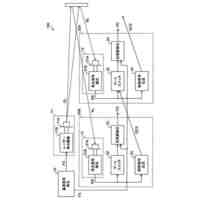
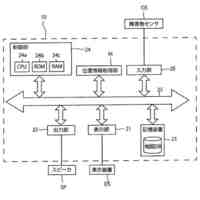
図12は、実施形態に係る監視装置システムの構成の一例を示す図である。
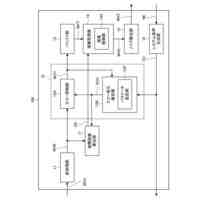
図13は、実施形態に係る監視装置の構成の一例を示す図である。
図14は、監視装置の機能を実現するコンピュータの一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0010】
以下に、図面を参照しつつ、本発明を実施するための形態(以下、実施の形態)について説明する。なお、以下に説明する実施の形態によって本発明が限定されるものではない。さらに、図面の記載において、同一の部分には同一の符号を付している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
監視装置、監視方法および監視プログラム
12日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
12日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
11日前
パイオニア株式会社
監視装置、監視方法および監視プログラム
11日前
パイオニア株式会社
発光装置、発光装置の制御方法及びプログラム
11日前
パイオニア株式会社
発光装置、発光装置の制御方法及びプログラム
11日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
1日前
パイオニア株式会社
音声処理装置、音声処理方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
音声処理装置、音声処理方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
音声処理装置、音声処理方法、プログラム及び記憶媒体
16日前
パイオニア株式会社
測距装置
11日前
パイオニア株式会社
光学装置
2日前
パイオニア株式会社
表示装置
2日前
パイオニア株式会社
光学装置
2日前
パイオニア株式会社
光学装置
8日前
パイオニア株式会社
センサ装置
8日前
パイオニア株式会社
振動制御装置
23日前
株式会社デンソーエレクトロニクス
発音器およびその製造方法
24日前
パイオニア株式会社
画像処理装置及びプログラム
23日前
パイオニア株式会社
画像表示装置及び画像表示方法
8日前
パイオニア株式会社
投光装置、投受光装置及び測距装置
25日前
パイオニア株式会社
表示制御装置、表示制御方法及びプログラム
8日前
パイオニア株式会社
測定装置、測定方法、プログラム、及び、記憶媒体
18日前
パイオニア株式会社
出力装置、出力方法、およびコンピュータプログラム
8日前
パイオニア株式会社
情報処理装置、地図データ生成装置、方法及びプログラム
8日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記録媒体
2日前
パイオニア株式会社
入力装置、入力装置の設定方法、入力装置用プログラム、および、記録媒体
11日前
パイオニア株式会社
情報処理装置、情報収集装置、地図情報更新タイミング判定システム、地図情報更新タイミング判定方法およびプログラム
8日前
パイオニア株式会社
端末側コンテンツ配信用プログラム、端末側の記憶媒体、端末側コンテンツ配信方法、端末側コンテンツ配信装置、サーバ側コンテンツ配信用プログラム、サーバ側の記憶媒体、サーバ側コンテンツ配信方法、及びサーバ側コンテンツ配信装置
2日前
日本精機株式会社
表示装置
24日前
日本精機株式会社
アセンブリ
1か月前
個人
準結晶の解析方法
1か月前
株式会社エビス
水準器
23日前
株式会社チノー
測定装置
5日前
株式会社豊田自動織機
自動走行体
29日前
株式会社不二越
塵埃噴射装置
18日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ