TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085697
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2025039515,2022089800
出願日
2025-03-12,2022-06-01
発明の名称
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/08 20200101AFI20250529BHJP(車両一般)
要約
【課題】ドライバに異常が生じた場合、車両を安全に停止することができる車両制御装置を提供する。
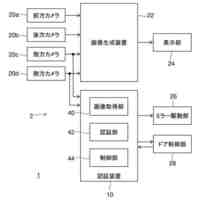
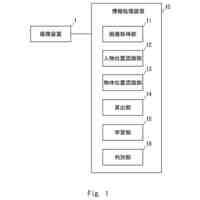
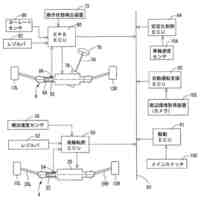
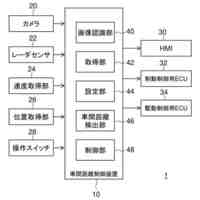
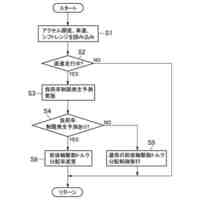
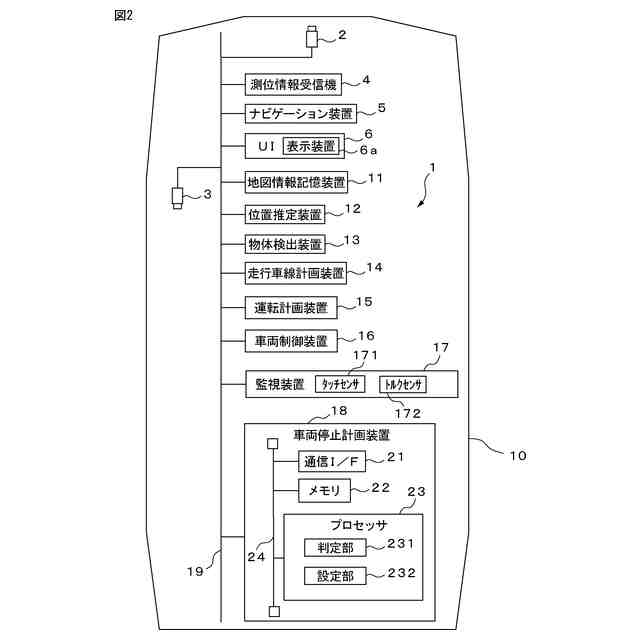
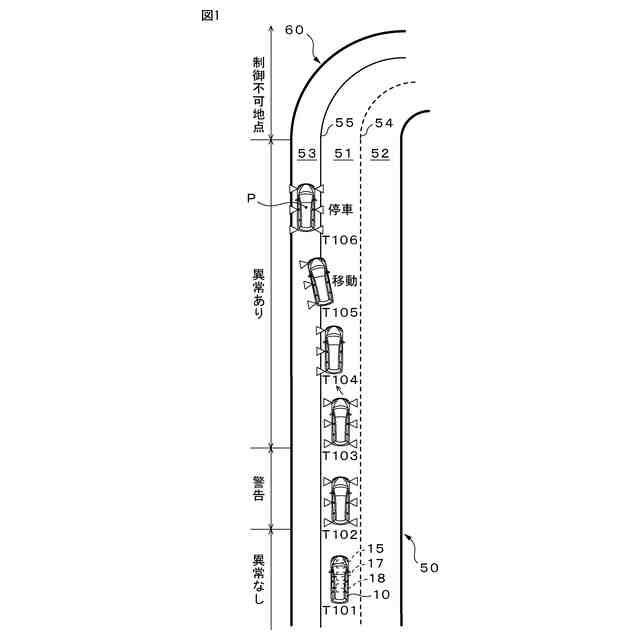
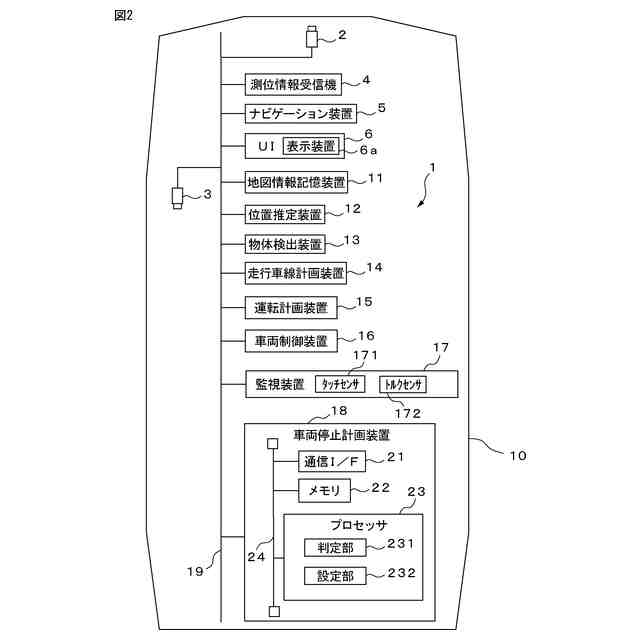
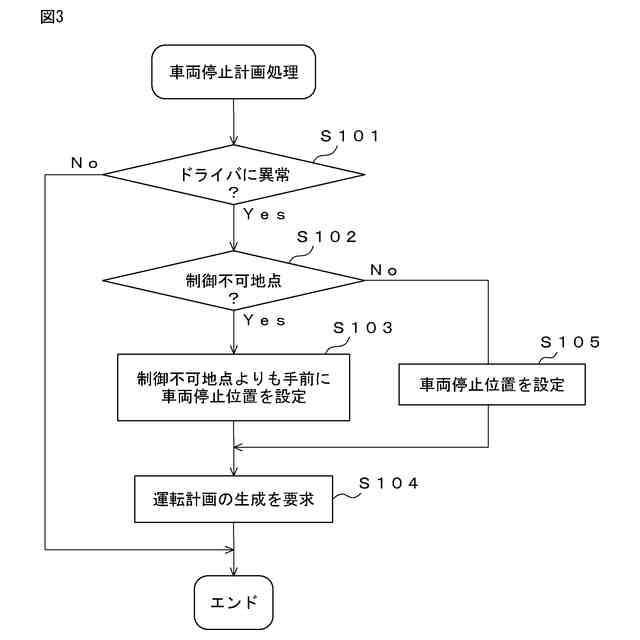
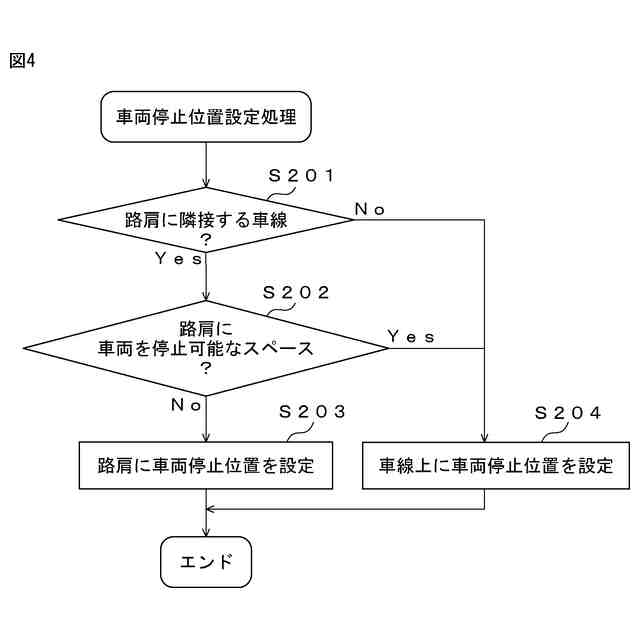
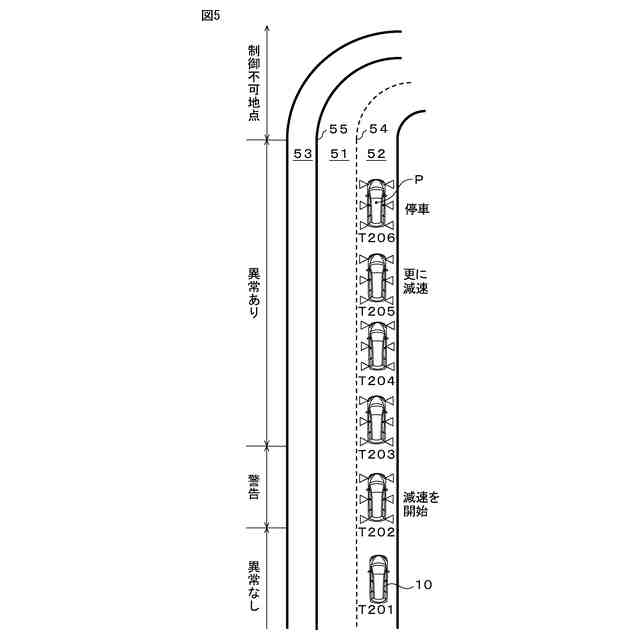
【解決手段】車両制御装置は、ドライバに異常があると判定された場合、車両10の現在位置から車両10の進路の前方に向かった所定の範囲内に、車両10の走行の自動制御が許容されない制御不可地点60が有るか否かを判定する判定部231と、判定部231によって制御不可地点60があると判定された場合、制御不可地点60よりも手前の位置に車両10を停止可能な車両停止位置Pを設定する設定部232と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
ドライバに異常があると判定された場合、車両の現在位置から前記車両の進路の前方に向かった所定の範囲内に、前記車両の走行の自動制御が許容されない制御不可地点が有るか否かを判定する判定部と、
前記判定部によって前記制御不可地点があると判定された場合、前記制御不可地点よりも手前の位置に前記車両を停止可能な車両停止位置を設定する設定部と、
を有する、ことを特徴とする車両制御装置。
続きを表示(約 780 文字)
【請求項2】
ドライバに異常があると判定された場合には、前記設定部は、前記車両の現在位置から前記車両停止位置までの走行に伴って前記車両に生じる状態に対する制限について、ドライバに異常がないと判定されている場合に許容される前記制限を超えることを許容して、前記車両停止位置を設定する、請求項1に記載の車両制御装置。
【請求項3】
前記制御不可地点は、所定の基準曲率半径よりも曲率半径の小さいカーブした地点、又は、所定の基準勾配よりも大きな勾配を有する地点を含む、請求項1に記載の車両制御装置。
【請求項4】
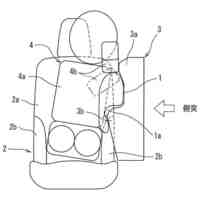
車両の運転席の近傍を表す監視画像に基づいて、ドライバに異常があるか否か判定される、請求項1~3の何れか一項に記載の車両制御装置。
【請求項5】
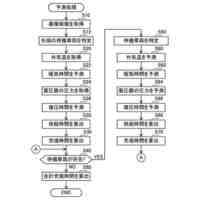
ドライバに異常があると判定された場合、車両の現在位置から前記車両の進路の前方に向かった所定の範囲内に、前記車両の走行の自動制御が許容されない制御不可地点が有るか否かを判定し、
前記制御不可地点が有ると判定された場合、前記制御不可地点よりも手前の位置に前記車両を停止可能な車両停止位置を設定する、
ことを含む処理をプロセッサに実行させる、ことを含む特徴とする車両制御用コンピュータプログラム。
【請求項6】
車両制御装置によって実行される車両制御方法であって、
ドライバに異常があると判定された場合、車両の現在位置から前記車両の進路の前方に向かった所定の範囲内に、前記車両の走行の自動制御が許容されない制御不可地点が有るか否かを判定し、
前記制御不可地点が有ると判定された場合、前記制御不可地点よりも手前の位置に前記車両を停止可能な車両停止位置を設定する、
ことを含む、ことを特徴とする車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御用コンピュータプログラム及び車両制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
車両に搭載される自動制御システムは、車両の現在位置と、車両の目的位置と、ナビゲーション用地図とに基づいて、車両のナビルートを生成する。自動制御システムは、地図情報を用いて車両の現在位置を推定し、車両をナビルートに沿って走行するように制御する。
【0003】
自動制御システムは、車両と他の車両との間に安全な距離が維持されるように、車両の走行を制御する。そして、自動制御で車両と他の車両との間に安全な距離が維持できなくなった時には、車両の運転を自動制御から手動制御へ変更して、車両の制御をドライバに移行する。
【0004】
また、自動制御システムは、ドライバに異常が生じた場合、車両を停止するように制御する(例えば、特許文献1参照)。これは、自動制御で車両と他の車両との間に安全な距離が維持できなくなった時に、車両の制御をドライバに移行できないためでもある。
【先行技術文献】
【特許文献】
【0005】
特開2015-228090号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
自動制御システムには、車両の制御が許容されない制御不可地点がある。例えば、制御不可地点には、車両の位置を推定するのに用いられる高精度地図の用意されていない地点、及び、曲率半径の小さい道路等の自動制御システムが安全に車両を制御することができない地点等が含まれる。
【0007】
制御不可地点の手前でドライバに異常が生じた場合、車両が制御不可地点で停止することになると、車両を安全に停止することができないおそれがある。
【0008】
本開示は、ドライバに異常が生じた場合、車両を安全に停止することができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、ドライバに異常があると判定された場合、車両の現在位置から前記車両の進路の前方に向かった所定の範囲内に、前記車両の走行の自動制御が許容されない制御不可地点が有るか否かを判定する判定部と、前記判定部によって前記制御不可地点があると判定された場合、前記制御不可地点よりも手前の位置に前記車両を停止可能な車両停止位置を設定する設定部と、
を有する、ことを特徴とする。
【0010】
また、この車両制御装置において、ドライバに異常があると判定された場合には、前記設定部は、前記車両の現在位置から前記車両停止位置までの走行に伴って前記車両に生じる状態に対する制限について、ドライバに異常がないと判定されている場合に許容される前記制限を超えることを許容して、前記車両停止位置を設定することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
モータ
3日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
防曇装置
2日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
水系電池
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
誘導電動機
2日前
トヨタ自動車株式会社
車両下部構造
3日前
トヨタ自動車株式会社
予測システム
3日前
トヨタ自動車株式会社
車両下部構造
5日前
トヨタ自動車株式会社
認証システム
3日前
トヨタ自動車株式会社
電源システム
3日前
トヨタ自動車株式会社
配管保護構造
3日前
トヨタ自動車株式会社
酸素貯蔵材料
5日前
トヨタ自動車株式会社
運転支援装置
5日前
トヨタ自動車株式会社
バスバー構造
5日前
トヨタ自動車株式会社
運転支援装置
3日前
トヨタ自動車株式会社
車両前部構造
3日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
車両の制御装置
5日前
トヨタ自動車株式会社
電池の製造方法
3日前
トヨタ自動車株式会社
非水系二次電池
3日前
トヨタ自動車株式会社
蓄電モジュール
3日前
トヨタ自動車株式会社
作動量取得装置
4日前
トヨタ自動車株式会社
車両用制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
リチウム二次電池
2日前
トヨタ自動車株式会社
車間距離制御装置
2日前
トヨタ自動車株式会社
異常判定システム
3日前
トヨタ自動車株式会社
サイドエアバッグ
3日前
トヨタ自動車株式会社
電動車両の制御装置
2日前
トヨタ自動車株式会社
バッテリパック構造
3日前
トヨタ自動車株式会社
リスク評価システム
2日前
トヨタ自動車株式会社
車両前部の冷却構造
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ