TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087728
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2025025010,2023020023
出願日
2025-02-19,2016-03-31
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250603BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】適切に自動走行を行う。
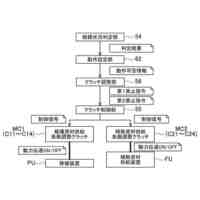
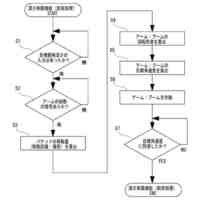
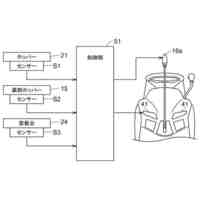
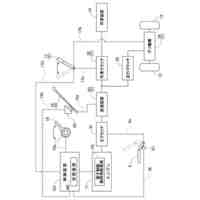
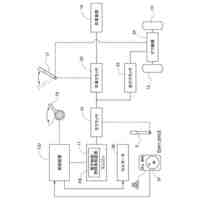
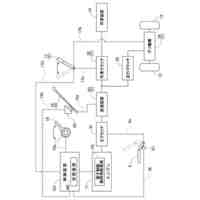
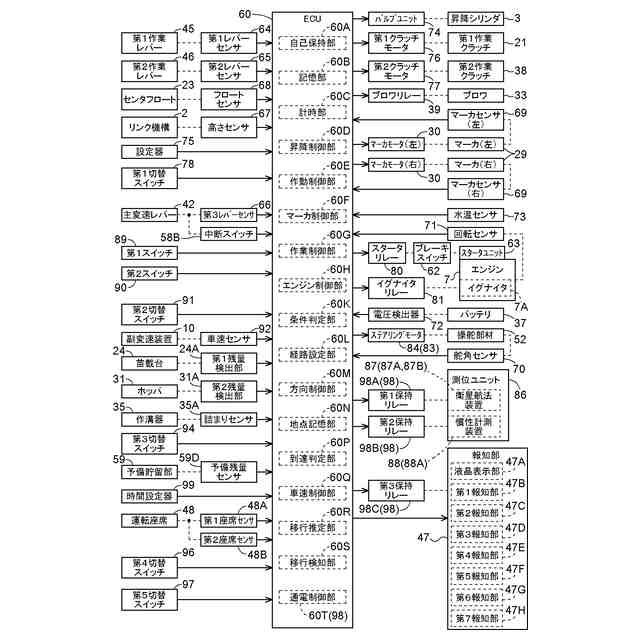
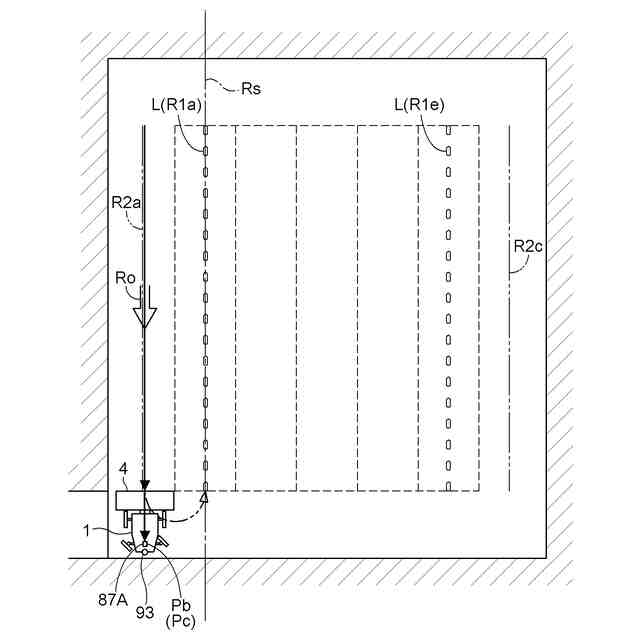
【解決手段】走行車体の少なくとも位置及び方位いずれかを測定する測位ユニット86と、走行車体の走行方向を制御する方向制御部60Mと、を備え、方向制御部60Mは、走行車体を目標直進経路から次の目標直進経路に向けて方向転換させる自動方向転換制御を実行可能である。
【選択図】図6
特許請求の範囲
【請求項1】
走行車体の少なくとも位置及び方位いずれかを測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、前記走行車体における走行状態の推移を検出する推移検出部と、前記走行車体に昇降可能に連結された対地作業装置を作業状態と非作業状態とに切り替える作業制御部とを備え、
前記方向制御部は、目標直進経路の制御対象領域では、前記目標直進経路と前記測位ユニットの測位結果とに基づいて、前記走行車体を自動的に前記目標直進経路上で走行させる自動直進制御を実行し、かつ地点記憶部に記憶されている方向転換開始地点において前記走行車体を自動的に走行中の前記目標直進経路から次の前記目標直進経路に向けて自動方向転換走行させる自動方向転換制御を実行し、
前記作業制御部は、前記推移検出部が前記走行車体の直進状態から前記自動方向転換制御による方向転換状態への移行を検出するのに連動して、前記対地作業装置を前記非作業状態に切り替える非作業状態切り替え制御を実行し、かつ、前記推移検出部が前記走行車体の方向転換状態から直進状態への移行を検出するのに連動して、前記対地作業装置を前記作業状態に切り替える作業状態切り替え制御を実行し、
前記走行車体が前記方向転換開始地点に到達したか否かを判定する到達判定部を備え、
前記方向制御部は、前記自動方向転換制御において、前記到達判定部によって前記走行車体の前記方向転換開始地点の到達が検知されると方向転換処理を行う作業車。
続きを表示(約 95 文字)
【請求項2】
前記方向制御部を、前記自動方向転換制御を実行する実行状態と前記自動方向転換制御を実行しない非実行状態とに切り替える切替スイッチを備える請求項1に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
作業車の一例である乗用田植機では、GPS装置により計測される位置情報に基づいて、ティーチング経路生成手段により、ティーチング経路とティーチング経路に対して平行な目標経路とを生成し、走行車体を目標経路上で自律走行させるものがある(例えば特許文献1参照)。
作業車の一例である乗用田植機では、走行機体の操向操作に連動して水田作業装置を自動的に上昇させるオートアップ制御手段と、変速レバーが後進変速操作径路に操作されることに連動して水田作業装置を自動的に上昇させるバックアップ制御手段とを備えたものがある(例えば特許文献2参照)。
作業車の一例である乗用田植機では、主変速装置の変速操作と前後進切り替え操作とを可能にする主変速レバーを備え、主変速レバーを操作案内するガイド溝に備えた左右向きの前後進切り替え経路における前進変速経路側の横外側をエンジン停止位置に設定し、かつ、主変速レバーのエンジン停止位置への操作を検出するスイッチをガイド板に装備し、スイッチの出力に基づいて主変速レバーのエンジン停止位置での所定時間の保持操作を検知した場合にエンジンを停止させるように構成したものがある(例えば特許文献3参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-131880号公報
特開2012-85646号公報
特開2006-94753号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1に記載の構成では、乗用田植機を目標経路上で自律走行させることができる。しかしながら、乗用田植機が方向転換領域(枕地)に到達すると、機体の走行が自動的にあるいは運転者(オペレータ)の操作により停止される。そして、運転者が対地作業装置(植付部)を上昇させて、自律走行スイッチを操作することにより、乗用田植機が所望する方向に自動的に旋回し、かつ、自動旋回を完了した後には、次の目標経路上を自律的に走行する。そして、植付開始位置に到達すると、機体の走行が自動的にあるいは運転者の操作により停止される。その後、運転者の操作により、対地作業装置を下降させることにより、引き続き目標経路上を自律的に走行する。
【0005】
前記特許文献2に記載の構成では、乗用田植機による一行程の作業走行が終了して、方向転換領域(畦際)での方向転換のために機体を大きく操向すると、オートアップ制御が働いて対地作業装置(水田作業装置)が自動的に上昇し、かつ、対地作業装置への伝動が断たれる。又、乗用田植機による一行程の作業走行が終了して、方向転換領域での方向転換(スイッチターン)のために機体を後進させると、バックアップ制御が働いて対地作業装置が自動的に上昇し、かつ、対地作業装置への伝動が断たれる。しかしながら、乗用田植機の方向転換後は、運転者が操作レバーを操作することで、対地作業装置が下降して作業地(圃場)に接地し、その後、運転者が再び操作レバーを操作することで対地作業装置への伝動が再開される。
【0006】
前記特許文献3に記載の構成では、作業走行中に苗補給作業などを行う必要が生じた場合には、運転者は、主変速レバーを前後進切り替え経路に操作することで、乗用田植機を走行停止させることができ、その後、主変速レバーをエンジン停止位置に操作することで、エンジンを停止させることができる。そして、苗補給作業などの終了後は、運転者は、主変速レバーをエンジン停止位置から前後進切り替え経路に操作することで、エンジンを再始動させることができ、その後、主変速レバーを前進変速経路に操作することで、乗用田植機を前進させることができる。しかしながら、前記特許文献3に記載の構成では、乗用田植機を目標経路上で自動的に走行させることができないことから、運転者は、乗用田植機が目標経路から外れないように操舵する必要がある。
【0007】
適切に自動走行を行う作業車の開発が望まれている。
【課題を解決するための手段】
【0008】
本発明に係る作業車は、走行車体の少なくとも位置及び方位いずれかを測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、前記走行車体における走行状態の推移を検出する推移検出部と、前記走行車体に昇降可能に連結された対地作業装置を作業状態と非作業状態とに切り替える作業制御部とを備え、前記方向制御部は、目標直進経路の制御対象領域では、前記目標直進経路と前記測位ユニットの測位結果とに基づいて、前記走行車体を自動的に前記目標直進経路上で走行させる自動直進制御を実行し、かつ地点記憶部に記憶されている方向転換開始地点において前記走行車体を自動的に走行中の前記目標直進経路から次の前記目標直進経路に向けて自動方向転換走行させる自動方向転換制御を実行し、前記作業制御部は、前記推移検出部が前記走行車体の直進状態から前記自動方向転換制御による方向転換状態への移行を検出するのに連動して、前記対地作業装置を前記非作業状態に切り替える非作業状態切り替え制御を実行し、かつ、前記推移検出部が前記走行車体の方向転換状態から直進状態への移行を検出するのに連動して、前記対地作業装置を前記作業状態に切り替える作業状態切り替え制御を実行し、前記走行車体が前記方向転換開始地点に到達したか否かを判定する到達判定部を備え、前記方向制御部は、前記自動方向転換制御において、前記到達判定部によって前記走行車体の前記方向転換開始地点の到達が検知されると方向転換処理を行う。
また、本発明に係る作業車は、目標直進経路を設定する経路設定部と、走行車体の位置及び方位を測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、前記走行車体における走行状態の推移を検出する推移検出部と、前記走行車体に昇降可能に連結された対地作業装置を作業状態と非作業状態とに切り替える作業制御部とを備え、前記方向制御部は、前記目標直進経路の制御対象領域では、前記目標直進経路と前記測位ユニットの測位結果とに基づいて、前記走行車体を自動的に前記目標直進経路上で走行させる自動直進制御を実行し、前記作業制御部は、前記推移検出部が前記走行車体の直進状態から方向転換状態への移行を検出するのに連動して、前記対地作業装置を前記非作業状態に切り替える非作業状態切り替え制御を実行し、かつ、前記推移検出部が前記走行車体の方向転換状態から直進状態への移行を検出するのに連動して、前記対地作業装置を前記作業状態に切り替える作業状態切り替え制御を実行する。
【0009】
この手段によると、目標直進経路の制御対象領域では、方向制御部の制御作動によって走行車体が自動的に目標直進経路上を走行することから、運転者は、走行車体が目標直進経路上から外れないように操舵する必要がない。
そして、走行車体が目標直進経路の制御対象領域から外れると、運転者が走行車体の操舵を行い、走行車体が作業地の方向転換領域に到達するのに伴って、運転者が走行車体を現在の目標直進経路から次の目標直進経路に移動させる方向転換操作を開始すると、推移検出部が走行車体の直進状態から方向転換状態への移行を検出し、この検出に基づく作業制御部の制御作動により、走行車体が直進状態から方向転換状態に移行するのに連動して、対地作業装置が作業状態から非作業状態に切り替わる。
その後、走行車体が次の目標直進経路に到達するのに伴って、運転者が方向転換操作を終了すると、推移検出部が走行車体の方向転換状態から直進状態への移行を検出し、この検出に基づく作業制御部の制御作動により、走行車体が方向転換状態から直進状態に移行するのに連動して、対地作業装置が非作業状態から作業状態に切り替わる。
つまり、目標直進経路の制御対象領域では、自動直進制御が実行されて走行車体が自動的に目標直進経路上を走行し、又、方向転換領域では、運転者の方向転換操作に連動して作業状態切り替え制御と非作業状態切り替え制御とが適切に実行されて、対地作業装置が適切なタイミングで作業状態と非作業状態とに切り替わる。
その結果、作業効率の低下を招くことなく、作業走行時に要する運転者の労力を効果的に軽減することができる。
【0010】
上記の課題を解決するための別の手段として、
本発明に係る作業車は、目標直進経路を設定する経路設定部と、走行車体の位置及び方位を測定する測位ユニットと、前記走行車体の走行方向を制御する方向制御部と、エンジンの作動を制御するエンジン制御部と、前記エンジンの一時停止条件及び再始動条件が成立したか否かを判定する条件判定部とを備え、
前記方向制御部は、前記目標直進経路の制御対象領域では、前記目標直進経路と前記測位ユニットの測位結果とに基づいて、前記走行車体を自動的に前記目標直進経路上で走行させる自動直進制御を実行し、
前記エンジン制御部は、前記条件判定部が前記一時停止条件の成立を判定したときに、前記エンジンを一時停止させるエンジン一時停止制御を実行し、かつ、前記条件判定部が前記再始動条件の成立を判定したときに、前記エンジンを再始動させるエンジン再始動制御を実行し、
前記方向制御部は、前記自動直進制御の実行中に前記エンジン一時停止制御が実行されると前記自動直進制御を中断し、かつ、前記自動直進制御の中断中に前記エンジン再始動制御が実行されると前記自動直進制御を再開する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
10日前
株式会社クボタ
田植機
20日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
田植機
10日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車両
27日前
株式会社クボタ
作業車両
27日前
株式会社クボタ
コンバイン
16日前
株式会社クボタ
圃場作業車
5日前
株式会社クボタ
作物収穫機
13日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
歩行型作業機
20日前
株式会社クボタ
歩行型作業機
20日前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
歩行型作業機
19日前
株式会社クボタ
歩行型作業機
19日前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
歩行型作業機
20日前
株式会社クボタ
歩行型作業機
19日前
株式会社クボタ
乗用型田植機
5日前
株式会社クボタ
歩行型作業機
5日前
株式会社クボタ
電動作業車両
12日前
株式会社クボタ
歩行型作業機
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ