TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081957
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195088
出願日
2023-11-16
発明の名称
作業機
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
E02F
3/43 20060101AFI20250521BHJP(水工;基礎;土砂の移送)
要約
【課題】本発明の作業機は、バケットのハンチングの発生を抑制できる作業機を提供する。
【解決手段】本発明は、機体に対して第一の横軸回りで回転可能に連結されたブームと、ブームの先端部に第二の横軸回りで回転可能に連結されたアームと、アームの先端部に連結されたバケットであって、アームとの連結位置から離れた位置に、土壌を掘削する際に先頭となるエッジ部を有するバケットと、ブーム、アーム、及びバケットのうちの少なくとも何れか一つを測定対象として該測定対象の回転を測定する回転センサと、測定対象の回転を制御する制御装置と、を備え、制御装置は、測定対象が回転する際の目標角速度と、回転センサの測定結果に基づいて導出される測定対象の実際の角速度との偏差に対して実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて測定対象の回転を制御する。
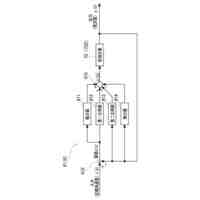
【選択図】図11
特許請求の範囲
【請求項1】
機体と、
前記機体に対して第一の横軸回りで回転可能に連結されたブームと、
前記ブームの先端部に第二の横軸回りで回転可能に連結されたアームと、
前記アームの先端部に連結されたバケットであって、前記アームとの連結位置から離れた位置に、土壌を掘削する際に先頭となるエッジ部を有するバケットと、
前記ブーム、前記アーム、及び前記バケットのうちの少なくとも何れか一つを測定対象として該測定対象の回転を測定する回転センサと、
前記測定対象の回転を制御する制御装置と、を備え、
前記制御装置は、
前記測定対象が回転する際の目標角速度と、前記回転センサの測定結果に基づいて導出される前記測定対象の実際の角速度との偏差に対して前記実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて前記測定対象の回転を制御する作業機。
続きを表示(約 1,400 文字)
【請求項2】
前記回転センサは、前記測定対象として前記ブームの前記第一の横軸回りでの回転を測定し、
前記制御装置は、
前記測定対象としての前記ブームが前記第一の横軸回りで回転する際の目標角速度と前記回転センサの測定結果に基づいて導出される前記ブームの前記実際の角速度との偏差に対して前記実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて前記ブームの回転を制御する請求項1に記載の作業機。
【請求項3】
前記回転センサは、前記測定対象として前記アームの前記第二の横軸回りの回転を測定し、
前記制御装置は、
前記測定対象としての前記アームが前記第二の横軸回りで回転する際の目標角速度と前記回転センサの測定結果に基づいて導出される前記アームの前記実際の角速度との偏差に対して前記実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて前記アームの回転を制御する請求項1に記載の作業機。
【請求項4】
前記回転センサは、前記測定対象として前記バケットの前記第三の横軸回りの回転を測定し、
前記制御装置は、
前記測定対象としての前記バケットが前記第三の横軸回りで回転する際の目標角速度と前記回転センサの測定結果に基づいて導出される前記バケットの前記実際の角速度との偏差に対して前記実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて前記バケットの回転を制御する請求項1に記載の作業機。
【請求項5】
前記補正関数は、
前記実際の角速度を分解した比例成分及び微分成分である請求項1~4のいずれか1項に記載の作業機。
【請求項6】
前記制御装置は、
前記偏差を比例成分と積分成分とに分解し、前記偏差の前記比例成分及び前記積分成分に対し、前記実際の角速度の前記比例成分及び前記微分成分を反映させて前記出力値とする請求項1~4のいずれか1項に記載の作業機。
【請求項7】
前記測定対象を回転させる油圧アクチュエータに対する作動油の供給を前記制御装置からの信号を受けて制御する制御弁を備え、
前記制御装置は、
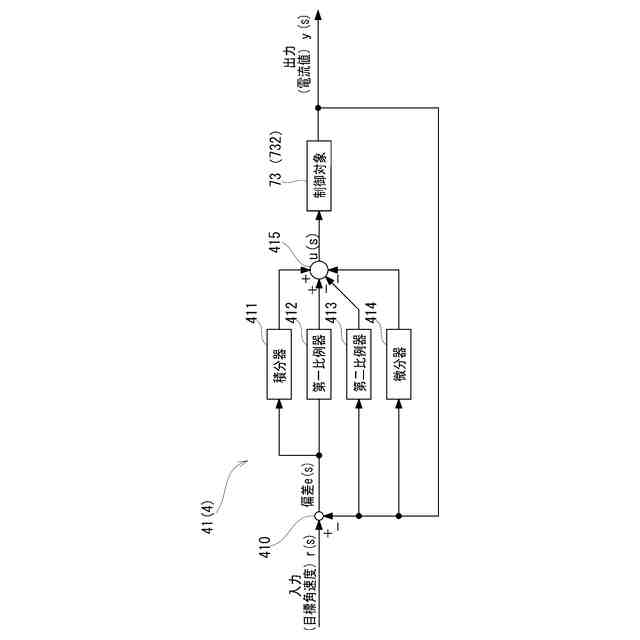
前記目標角速度と前記実際の角速度との前記偏差を出力する減算器と、
前記減算器の出力する偏差の積分成分を求める積分器と、
前記減算器の出力する偏差の比例成分を求める第一の比例器と、
前記実際の角速度の比例成分を求める第二の比例器と、
前記実際の角速度の微分成分を求める微分器と、
前記積分器、前記第一の比例器、前記第二の比例器、及び前記微分器の出力を加算減算する加算減算器と、を備え、
前記加算減算器の出力値を前記制御弁に対する信号として出力する請求項1~請求項4の何れか一つに記載の作業機。
【請求項8】
前記回転センサのノイズを除去するローパスフィルタを備え、
前記制御装置は、
前記ローパスフィルタからの信号を前記回転センサの検出結果として前記実際の角速度を導出する請求項1~4のいずれか1項に記載の作業機。
【請求項9】
前記ローパスフィルタは、5×5ガウシアンフィルタである請求項8に記載の作業機。
【請求項10】
前記回転センサは、ポテンショメータである請求項1~4のいずれか1項に記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、土壌を掘削するショベル装置を備えた作業機に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来から、バケットによる掘削深さの計測結果に応じて掘削動作を制御する作業機が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-061042号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ブーム、アーム、或いはバケットが回転する際にそれら各部の回転を監視する機器(例えば、角度センサ)の性能や品質に機器毎のバラつきがあり、その結果、各部の動作速度(回転時の角速度)にバラつきが発生することがある。このように各部の動作速度にバラつきがでるとバケットが上下動する、所謂、ハンチングを発生する。そのため、エッジ部を一定の高さに維持することができなくなり、バケットの先端部を水平移動させる(水平引きする)場合に、土壌を一定の深さで掘削できなくなる。
【0005】
そこで、本発明は、バケットのハンチングの発生を抑制できる作業機を提供する。
【課題を解決するための手段】
【0006】
本発明に係る作業機は、機体と、前記機体に対して第一の横軸回りで回転可能に連結されたブームと、前記ブームの先端部に第二の横軸回りで回転可能に連結されたアームと、前記アームの先端部に連結されたバケットであって、前記アームとの連結位置から離れた位置に、土壌を掘削する際に先頭となるエッジ部を有するバケットと、前記ブーム、前記アーム、及び前記バケットのうちの少なくとも何れか一つを測定対象として該測定対象の回転を測定する回転センサと、前記測定対象の回転を制御する制御装置と、を備え、前記制御装置は、前記測定対象が回転する際の目標角速度と、前記回転センサの測定結果に基づいて導出される前記測定対象の実際の角速度との偏差に対して前記実際の角速度に基づく補正関数を直接的又は間接的に反映させた出力値に基づいて前記測定対象の回転を制御する。
【発明の効果】
【0007】
本発明の作業機は、バケットのハンチングの発生を抑制できる。
【図面の簡単な説明】
【0008】
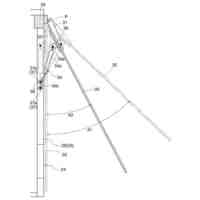
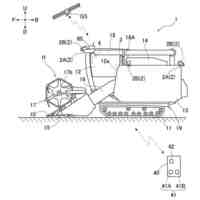
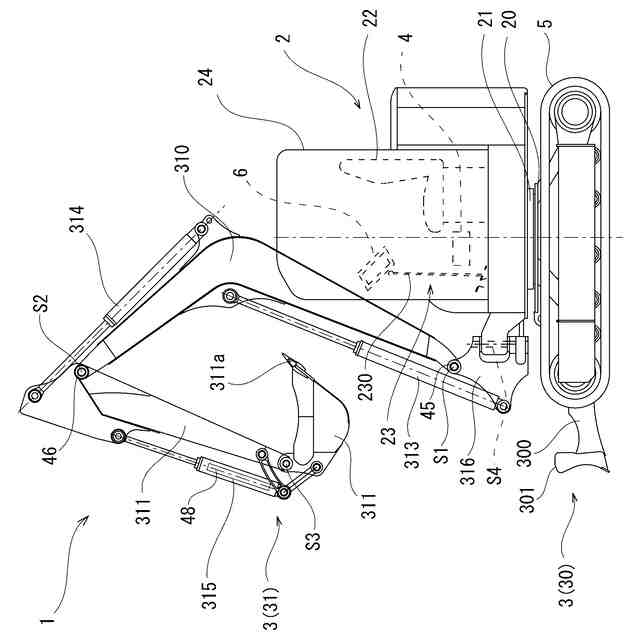
図1は、本発明の第一実施形態に係る作業機の側面図である。
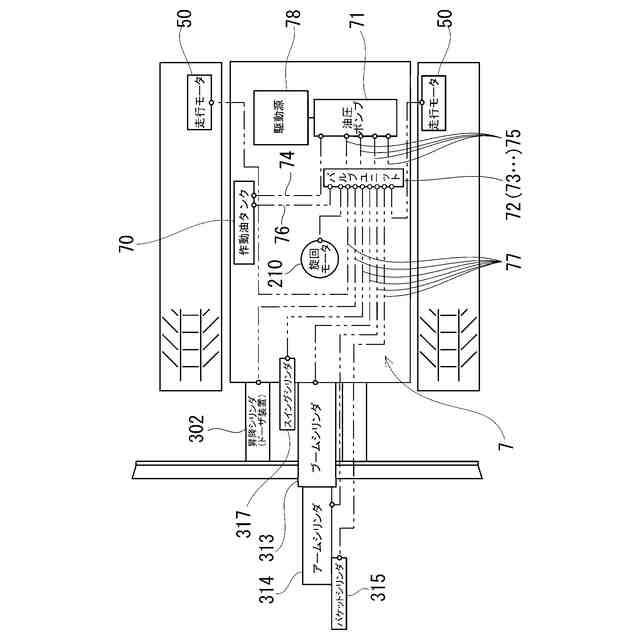
図2は、第一実施形態に係る作業機の油圧系の概略ブロック図である。
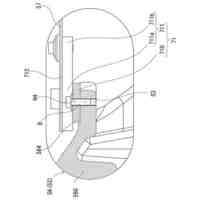
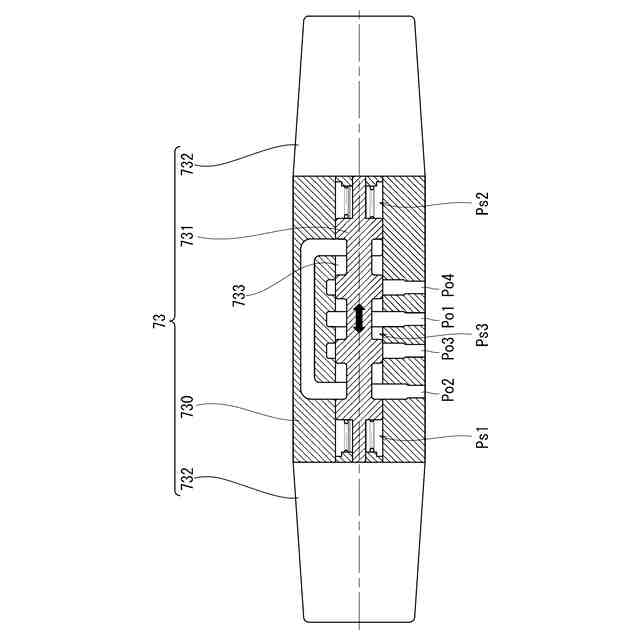
図3は、第一実施形態に係る作業機のコントロールバルブに含まれる制御弁の一例の概略断面図である。
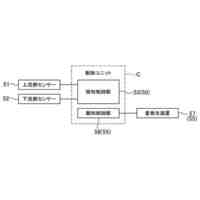
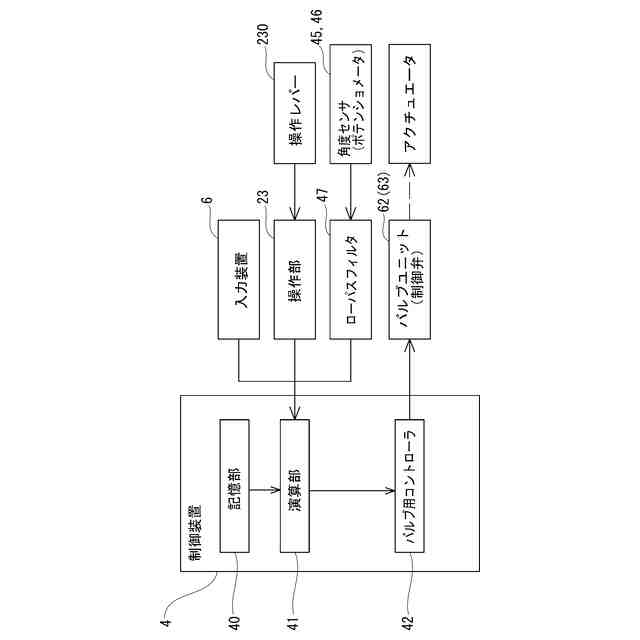
図4は、第一実施形態に係る作業機の制御装置を含む電気(信号)系統の概略ブロック図である。
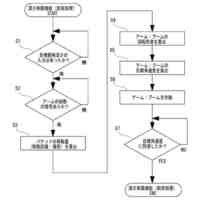
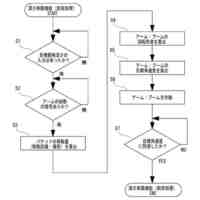
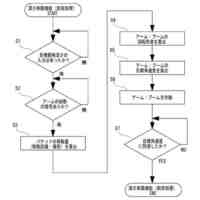
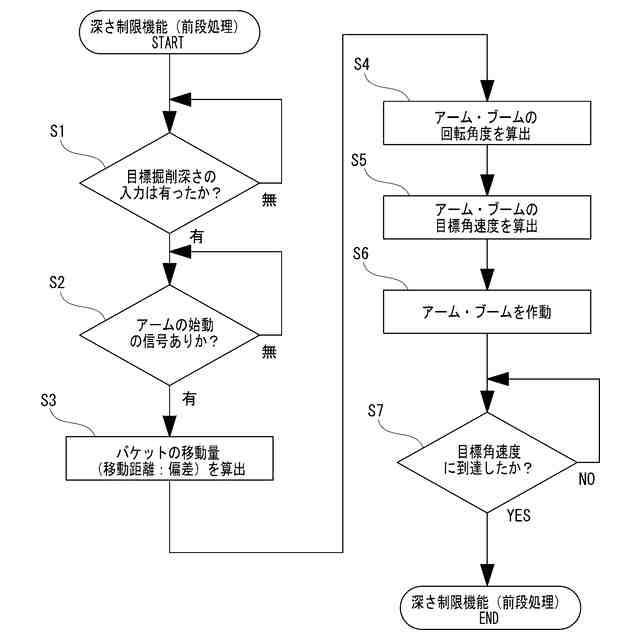
図5は、第一実施形態に係る作業機の深さ制限機能の前段処理のフロー図である。
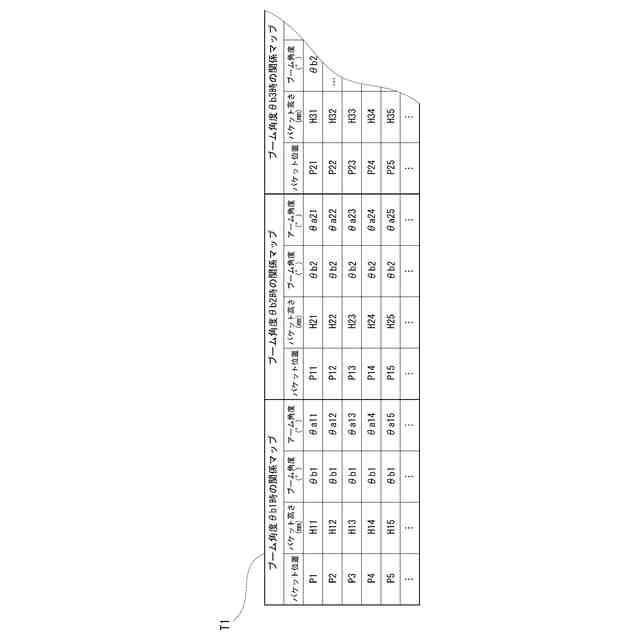
図6は、第一実施形態に係る作業機の前段処理に用いられる情報(データ)の関係性を示すテーブル(マップ)の概念図である。
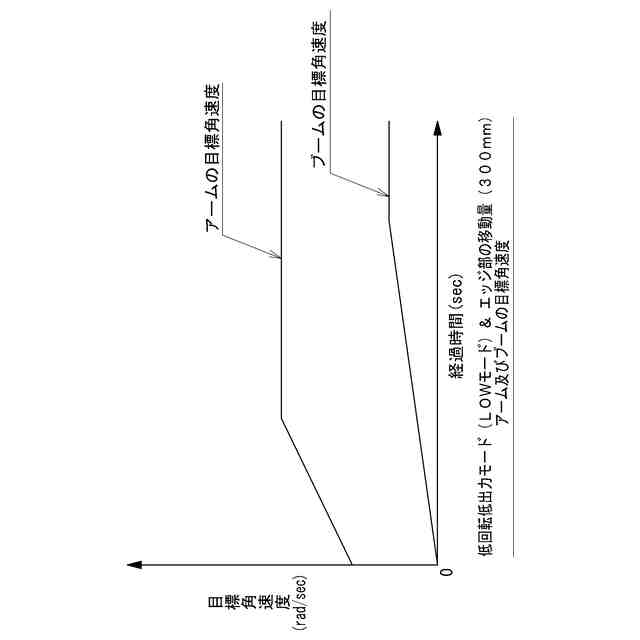
図7は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が多い場合の低回転低出力モードのグラフである。
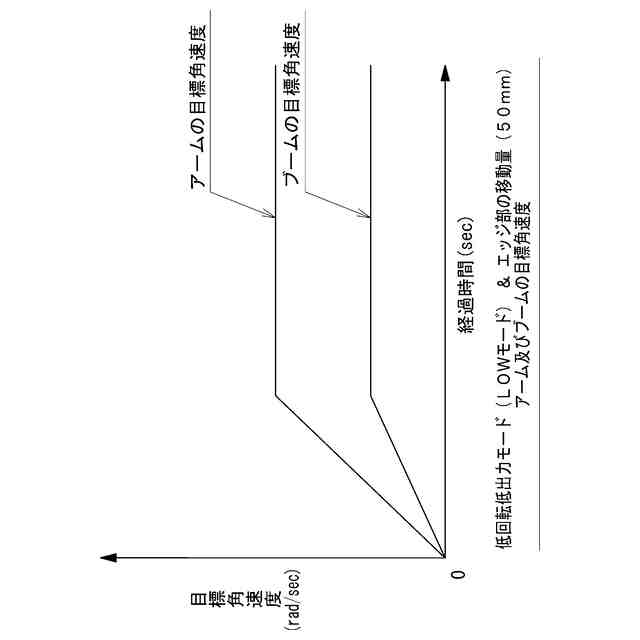
図8は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が少ない場合の低回転低出力モードのグラフである。
図9は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が多い場合の高回転高出力モードのグラフである。
図10は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が少ない場合の高回転高出力モードのグラフである。
図11は、第一実施形態に係る作業機の制御装置の演算部の概略説明図である。
図12は、第一実施形態に係る作業機のバケットの動作を制限する領域の説明図である。
図13は、第一実施形態に係る作業機のバケットの動作を制限する領域でのバケットの角速度を示すグラフである。
図14は、本発明の第二実施形態に係る作業機の前段処理に用いられる情報(データ)を説明するための説明図である。
図15は、第二実施形態に係る作業機の前段処理に用いられる情報(データ)の関係性を示すテーブル(マップ)の概念図である。
図16は、第二実施形態に係る作業機の深さ制限機能の前段処理のフロー図である。
【発明を実施するための形態】
【0009】
(第一実施形態)
以下、本発明の一実施形態に係る作業機について、図面を参照しながら説明する。
【0010】
図1に示すように、作業機1は、機体2と、機体2に支持された作業装置3と、少なくとも作業装置3の動作を制御する制御装置4と、を備える。さらに、作業機1は、機体2を走行可能に支持する走行装置5を備える。本実施形態に係る作業機1は、上記構成に加え、作業者が必要な情報を入力する入力装置6を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
20日前
株式会社クボタ
移植機
22日前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
29日前
株式会社クボタ
移植機
22日前
株式会社クボタ
収穫機
27日前
株式会社クボタ
作業機
27日前
株式会社クボタ
作業機
27日前
株式会社クボタ
作業機
27日前
株式会社クボタ
作業機
27日前
株式会社クボタ
作業車
21日前
株式会社クボタ
移植機
23日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
23日前
株式会社クボタ
収穫機
22日前
株式会社クボタ
移植機
22日前
株式会社クボタ
作業機
1日前
株式会社クボタ
田植機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
移植機
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ