TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088381
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203056
出願日
2023-11-30
発明の名称
作業機械、制御方法および作業システム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/20 20060101AFI20250604BHJP(水工;基礎;土砂の移送)
要約
【課題】計測データの精度に起因する意図しない挙動を防ぐ。
【解決手段】作業機械の本体は、第一本体と、第一本体に対して旋回動作する第二本体とを備える。アクチュエータは、第二本体を第一本体に対して旋回駆動させる。第一センサは、本体に設けられ、測位データである第一計測データを取得する。コントローラは、第一計測データに基づいてアクチュエータによる旋回制御を実行する。コントローラは、第一計測データの精度に基づいて旋回制御の実行の可否を判定する。
【選択図】図1
特許請求の範囲
【請求項1】
第一本体と、前記第一本体に対して旋回動作する第二本体とを備える本体と、
前記第二本体を前記第一本体に対して旋回駆動させるアクチュエータと、
前記本体に設けられた、測位データである第一計測データを取得する第一センサと、
前記第一計測データに基づいて前記アクチュエータによる旋回制御を実行するコントローラであって、前記第一計測データの精度に基づいて前記旋回制御の実行の可否を判定するコントローラと、
を備える作業機械。
続きを表示(約 1,200 文字)
【請求項2】
前記コントローラは、前記旋回制御中に取得された前記第一計測データに基づいて前記旋回制御の継続の可否を判定する
請求項1に記載の作業機械。
【請求項3】
前記コントローラは、前記第一計測データの精度が前記旋回制御に係る条件を満たさなくなった時点から所定時間が経過したときに、前記旋回制御を中止する
請求項2に記載の作業機械。
【請求項4】
前記第一本体と前記第二本体の旋回角度に係る計測データである第二計測データを取得する第二センサを備え、
前記コントローラは、前記第一計測データの精度が前記旋回制御に係る条件を満たさなくなった時点から所定時間が経過するまで、前記第二計測データに基づいて前記旋回制御を実行する
請求項3に記載の作業機械。
【請求項5】
前記第一計測データは、衛星に対する前記第一センサの位置を示すデータを含む
請求項1に記載の作業機械。
【請求項6】
前記コントローラは、前記第一計測データが示す位置がFix解である場合に、前記旋回制御の開始を許可する
請求項5に記載の作業機械。
【請求項7】
積込対象に設けられた測位センサの計測データである第三計測データを取得する取得部と、
前記コントローラは、前記第一計測データおよび前記第三計測データに基づいて前記旋回制御の目標旋回角を決定し、前記第一計測データの精度および前記第三計測データの精度に基づいて前記旋回制御の開始の可否を判定する
請求項1に記載の作業機械。
【請求項8】
第一本体と、前記第一本体に対して旋回動作する第二本体とを備える本体と、
前記第二本体を前記第一本体に対して旋回駆動させるアクチュエータと、
前記本体に設けられた、測位データである第一計測データを取得する第一センサと、
コントローラと、
を備える作業機の制御方法であって、
前記コントローラが、前記第一計測データの精度に基づいて前記アクチュエータによる旋回制御の実行の可否を判定するステップと、
前記コントローラが、前記旋回制御の開始が許可された場合に、前記第一計測データに基づいて前記旋回制御を実行するステップと、
を有する制御方法。
【請求項9】
第一本体と、前記第一本体に対して旋回動作する第二本体とを備える本体と、
前記第二本体を前記第一本体に対して旋回駆動させるアクチュエータと、
前記本体に設けられた、測位データである第一計測データを取得する第一センサと、
前記第一計測データに基づいて前記アクチュエータによる旋回制御を実行するコントローラであって、前記第一計測データの精度に基づいて前記旋回制御の実行の可否を判定するコントローラと、
を備える作業システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械および制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、作業機械の自動排土制御に関する技術が開示されている。特許文献1に係る自動排土制御は、作業機械の位置および方位を示すGNSSの計測データに基づいて、作業機が運搬車両へ向くように旋回し、かつバケットが運搬車両のベッセルの上に位置するよう自動的に制御するものである。
【先行技術文献】
【特許文献】
【0003】
特開2019-065661号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GNSSによる計測の精度は、信号を受信可能な人工衛星の数によって変化する。信号を受信可能な人工衛星の数は、時刻や周囲の地形によって変化する。GNSSの計測において、Fix解が得られる場合、計測誤差は数cmである一方で、Fix解が得られずにFloat解までしか得られない場合、計測誤差は数10cmから数mとなる。誤差が大きいと、作業機械を正しく制御できず、作業機と運搬車両とが接触するなどの意図しない挙動が発生する可能性がある。
【0005】
本開示の目的は、旋回制御において意図しない挙動を防ぐことができる作業機械、制御方法および作業システムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、作業機械は、第一本体と、前記第一本体に対して旋回動作する第二本体とを備える本体と、前記第二本体を前記第一本体に対して旋回駆動させるアクチュエータと、前記本体に設けられた、測位データである第一計測データを取得するGNSSセンサと、前記第一計測データに基づいて前記アクチュエータによる旋回制御を実行するコントローラであって、前記第一計測データの精度に基づいて前記旋回制御の実行の可否を判定するコントローラと、を備える。
【発明の効果】
【0007】
上記態様によれば、計測データの精度に起因する意図しない挙動を防ぐことができる。
【図面の簡単な説明】
【0008】
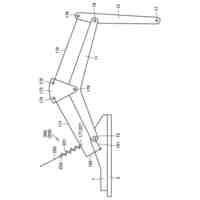
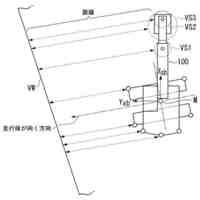
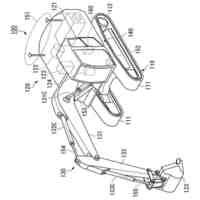
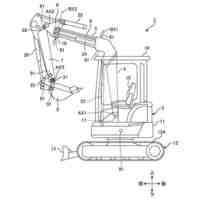
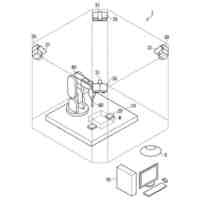
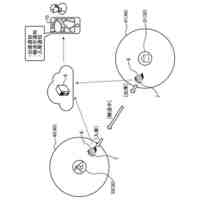
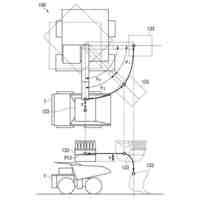
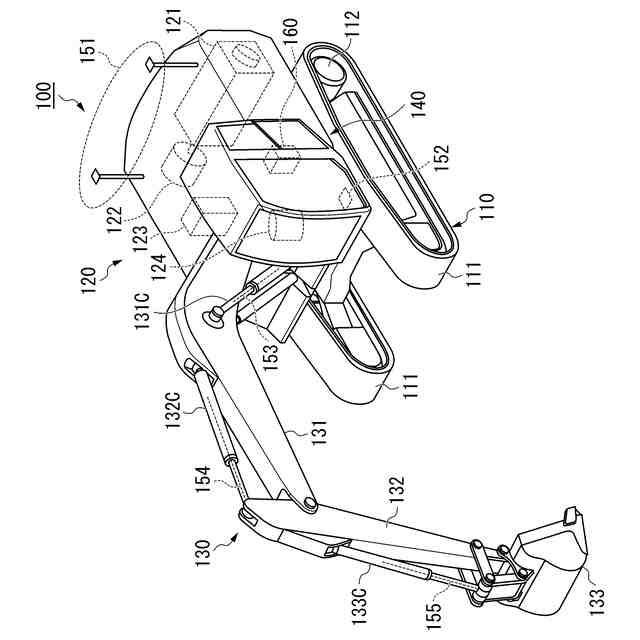
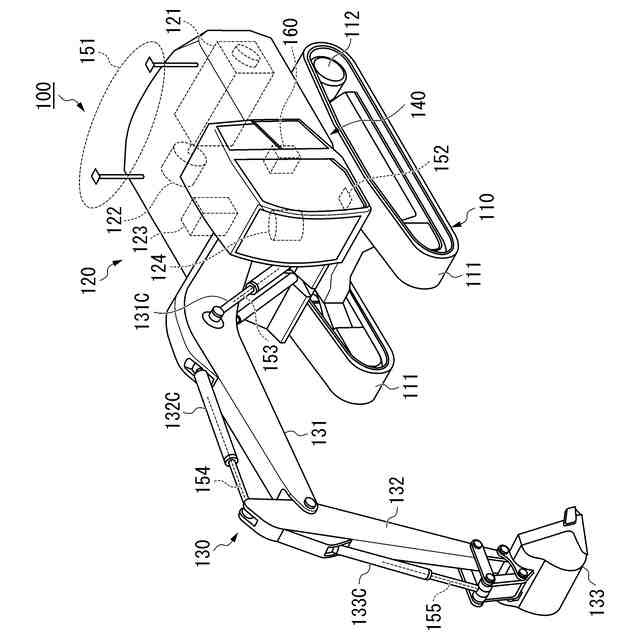
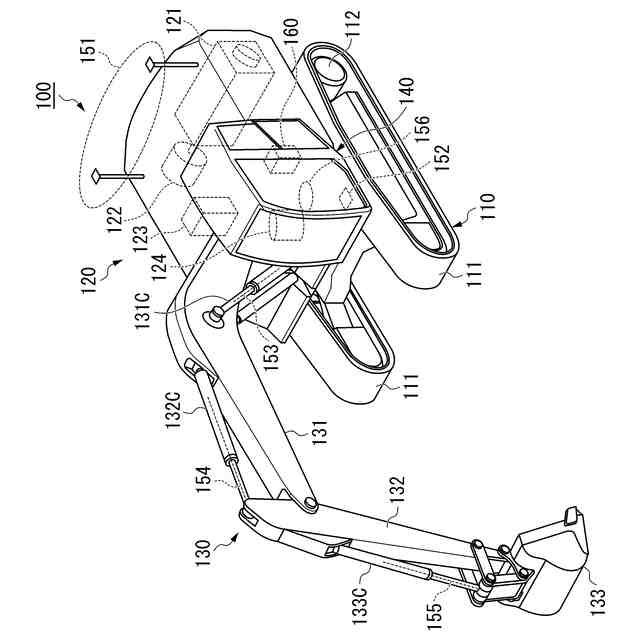
第一実施形態に係る作業機械の構成を示す概略図である。
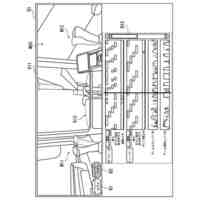
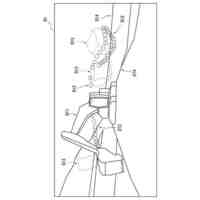
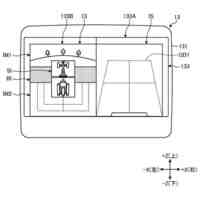
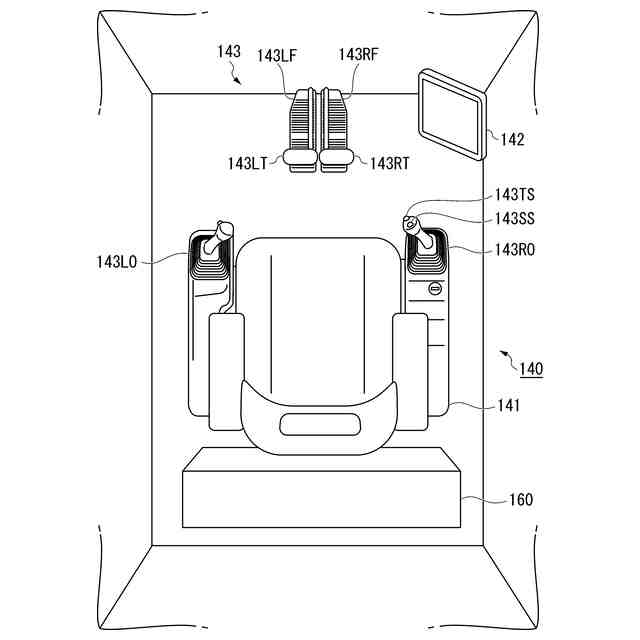
第一実施形態に係る運転室の内部の構成を示す図である。
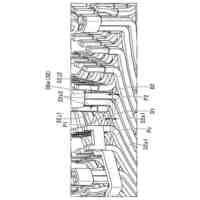
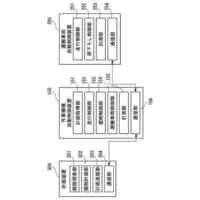
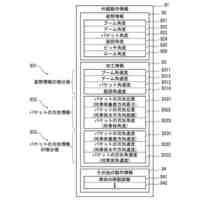
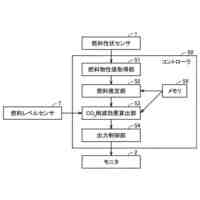
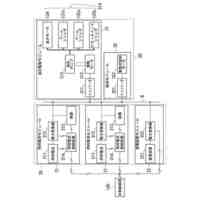
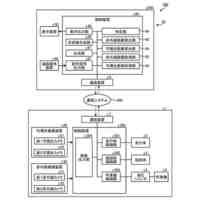
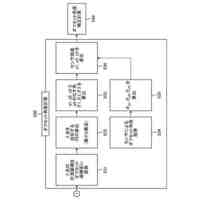
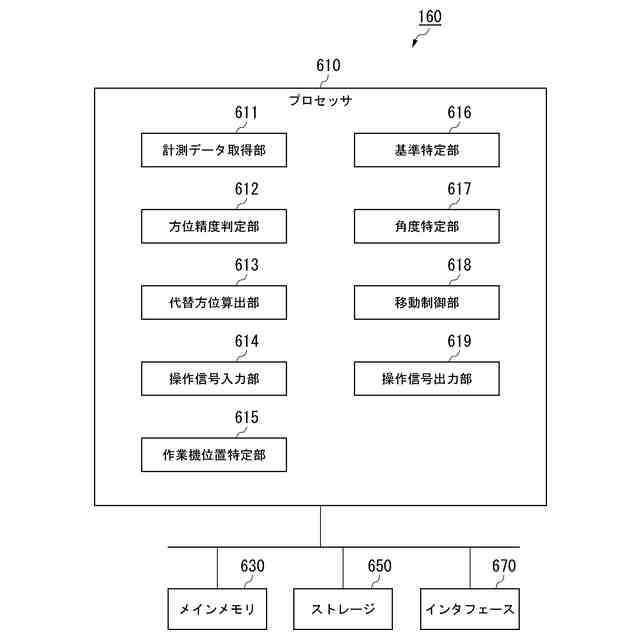
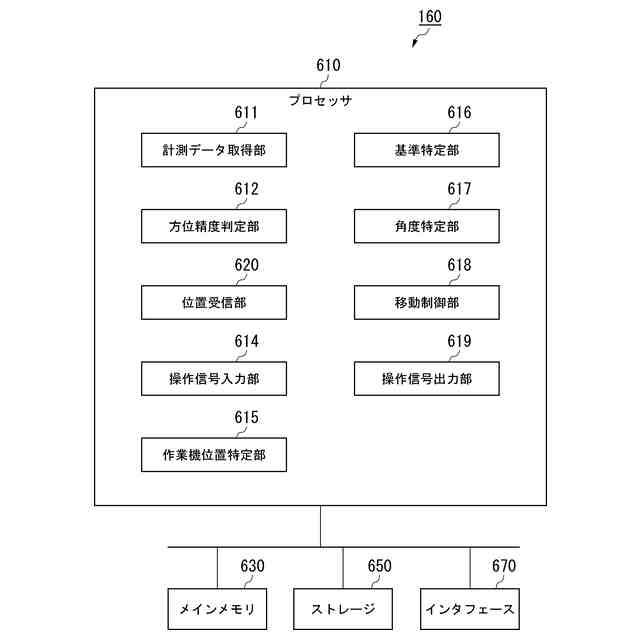
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
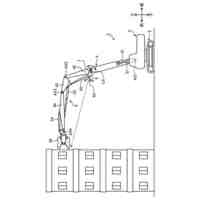
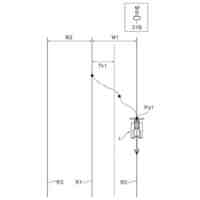
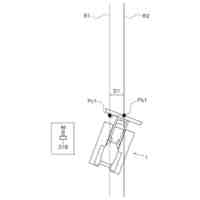
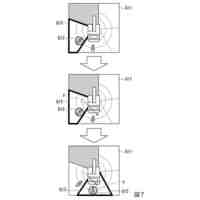
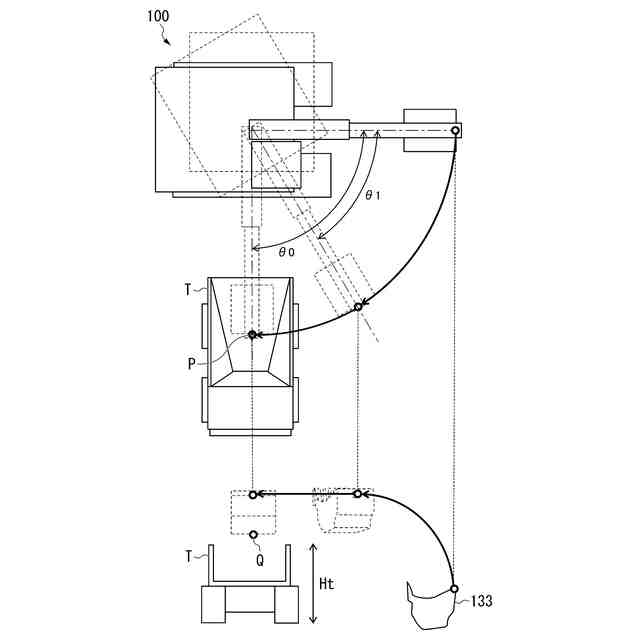
第一実施形態に係る第一旋回における作業機械の動きの例を示す図である。
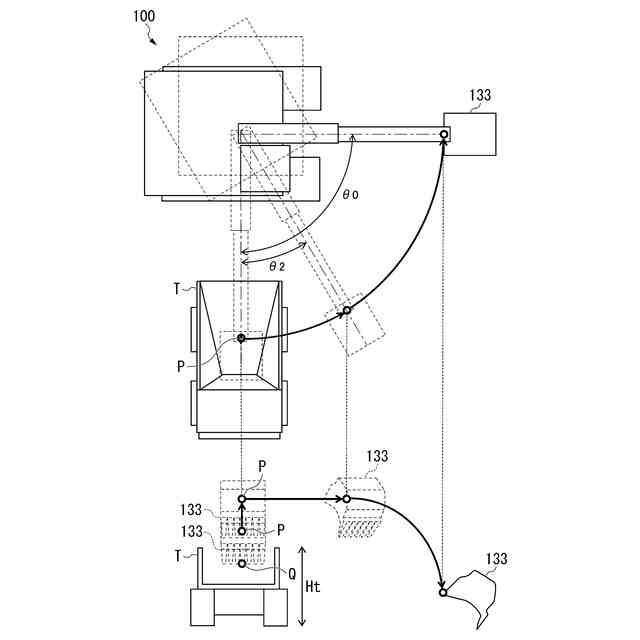
第一実施形態に係る第二旋回における作業機械の動きの例を示す図である。
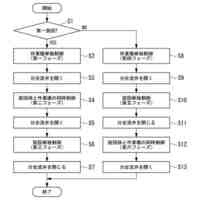
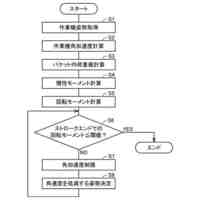
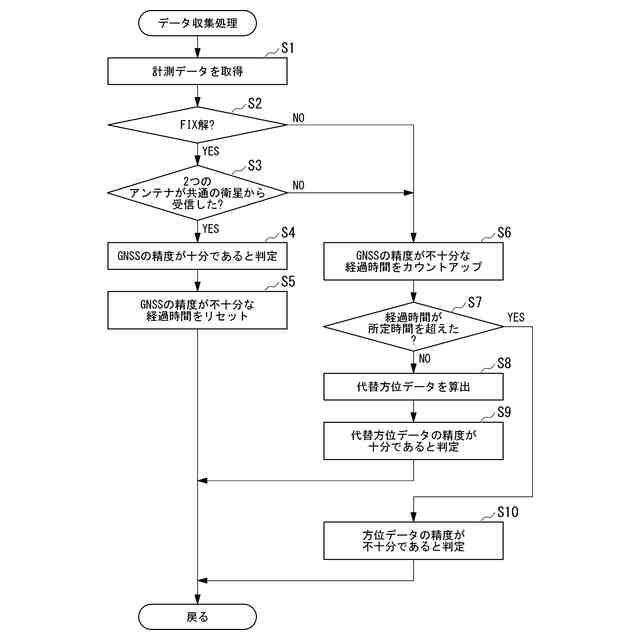
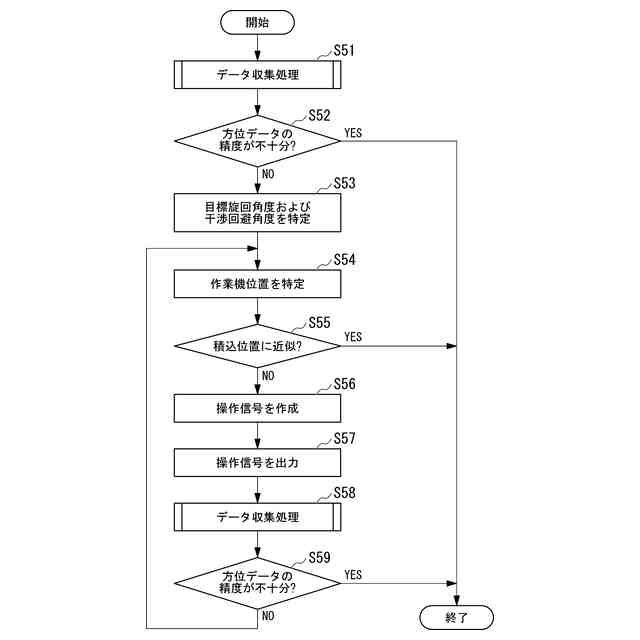
第一実施形態に係る制御装置によるデータ収集処理を示すフローチャートである。
第一実施形態に係る制御装置による自動制御を示すフローチャートである。
第三実施形態に係る作業機械の構成を示す概略図である。
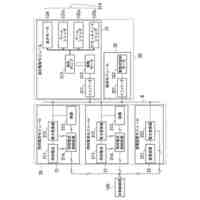
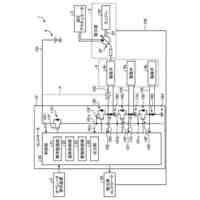
第三実施形態に係る制御装置の構成を示す概略ブロック図である。
第三実施形態に係る制御装置によるデータ収集処理を示すフローチャートである。
第三実施形態に係る制御装置による自動制御を示すフローチャートである。
【発明を実施するための形態】
【0009】
〈第一実施形態〉
以下、図面を参照しながら実施形態について詳しく説明する。
【0010】
《作業機械100の構成》
図1は、第一実施形態に係る作業機械100の構成を示す概略図である。
作業機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、荷としてダンプトラックなどの積込対象Tのベッセルなど荷台に積み込む。作業機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また作業機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る作業機械100は、バックホウショベルである。作業機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。積込対象Tの例としては、ダンプトラック、ホッパなどが挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
減速機
1か月前
株式会社小松製作所
作業機械
3日前
株式会社小松製作所
作業機械
29日前
株式会社小松製作所
作業機械
22日前
株式会社小松製作所
蓋開閉装置
1か月前
株式会社小松製作所
作業車両の昇降ステップ
1か月前
株式会社小松製作所
制御システムおよび作業機械
21日前
株式会社小松製作所
再生システムおよび再生方法
1か月前
株式会社小松製作所
再生システムおよび再生方法
1か月前
株式会社小松製作所
ステータ、回転電機及び作業機械
21日前
株式会社小松製作所
システム、方法およびプログラム
21日前
株式会社小松製作所
作業機械および作業機械の制御方法
23日前
株式会社小松製作所
表示制御システムおよび表示制御方法
1か月前
株式会社小松製作所
作業機械、制御方法および作業システム
1か月前
株式会社小松製作所
作業機械、散水装置、及び散水システム
23日前
株式会社小松製作所
油圧ショベルの較正システム及び較正方法
1か月前
株式会社小松製作所
計画装置、作業機械、運搬車両および計画方法
22日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
22日前
株式会社小松製作所
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
22日前
株式会社小松製作所
加工機械、加工機械の制御装置および加工機械の制御方法
22日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
22日前
株式会社小松製作所
作業機械の燃料識別システムおよび作業機械の燃料識別方法
1か月前
株式会社小松製作所
作業機械、及び、作業機械用の電動パワートレインユニット
21日前
株式会社小松製作所
アタッチメントの管理システム、情報端末、及びアタッチメントの管理方法
1か月前
株式会社小松製作所
アタッチメントの管理システム、情報端末、及びアタッチメントの管理方法
1か月前
株式会社小松製作所
作業機械、燃料電池システムおよび燃料電池システムを制御するための方法
1か月前
株式会社小松製作所
アタッチメントの管理システム、情報端末、及びアタッチメントの管理方法
1か月前
株式会社小松製作所
作業機械、燃料電池システムおよび燃料電池システムを制御するための方法
1か月前
株式会社小松製作所
表示システム及び表示方法
1か月前
株式会社小松製作所
作業機械及び作業機械の制御方法
6日前
株式会社小松製作所
積込機械の制御装置及び制御方法
14日前
株式会社小松製作所
オフセット角度較正方法、姿勢検出方法、オフセット角度較正システム、及び姿勢検出システム
1か月前
株式会社小松製作所
周辺監視システム、作業機械、及び作業機械の周辺監視方法
1か月前
株式会社小松製作所
作業機械の障害物報知システムおよび作業機械の障害物報知方法
1か月前
個人
耐震原子炉設備
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ