TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104482
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222308
出願日
2023-12-28
発明の名称
システム、方法およびプログラム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/22 20060101AFI20250703BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械が進入禁止区域に侵入しないよう制御する。
【解決手段】システムは、作業機械の侵入を禁止する面である仮想壁を特定する。システムは、仮想壁に基づいて、作業機械の走行速度を決定する。
【選択図】図5
特許請求の範囲
【請求項1】
作業機械を制御するためのシステムであって、
プロセッサを備え、
前記プロセッサは、
前記作業機械の侵入を禁止する面である仮想壁を特定し、
特定した前記仮想壁に基づいて、前記作業機械の走行速度を制御する、
システム。
続きを表示(約 1,200 文字)
【請求項2】
前記プロセッサは、
前記仮想壁と前記作業機械とが接触しないように前記走行速度を制御する
請求項1に記載のシステム。
【請求項3】
前記プロセッサは、
前記作業機械の外殻と前記仮想壁との距離に基づいて前記走行速度を制御する、
請求項1に記載のシステム。
【請求項4】
前記作業機械は、左右一対の走行装置を備え、
前記プロセッサは、
前記左右一対の走行装置それぞれの操作方向および前記左右一対の走行装置それぞれの操作量の少なくともいずれか一方に基づいて、前記走行速度を制御する、
請求項3に記載のシステム。
【請求項5】
前記プロセッサは、
前記左右一対の走行装置がいずれも前記仮想壁に近づく方向に操作された場合、前記仮想壁と前記作業機械とが接触しないように前記走行速度を制御する、
請求項4に記載のシステム。
【請求項6】
前記プロセッサは、
前記左右一対の走行装置がいずれも前記仮想壁から離れる方向に操作された場合、前記走行速度を制限しない、
請求項4に記載のシステム。
【請求項7】
前記プロセッサは、
前記左右一対の走行装置の操作方向が互いに異なる場合に、前記作業機械の外殻のうち前記仮想壁に近づく部分を特定し、特定した部分と前記仮想壁との距離に基づいて前記走行速度を制御する、
請求項4に記載のシステム。
【請求項8】
前記プロセッサは、
前記左右一対の走行装置の操作方向に基づいて、前記左右一対の走行装置による前記作業機械の旋回方向を特定し、
特定した前記旋回方向に基づいて、前記外殻のうち、前記仮想壁と前記作業機械の車体の前後方向に伸びる軸と左右方向に伸びる軸とを通る平面とに交差し、前記左右一対の走行装置の中点を通る平面より、前記仮想壁に近づく方向に回転する走行装置が存在する側の部分を、前記仮想壁に近づく部分として特定する、
請求項7に記載のシステム。
【請求項9】
前記プロセッサは、
前記左右一対の走行装置の操作量が異なる場合に、前記作業機械の外殻のうち前記仮想壁に近づく部分を特定し、特定した部分と前記仮想壁との距離に基づいて前記走行速度を制御する、
請求項4に記載のシステム。
【請求項10】
前記プロセッサは、
前記左右一対の走行装置の前記操作量に基づいて、前記左右一対の走行装置による前記作業機械の旋回方向を特定し、
特定した前記旋回方向に基づいて、前記外殻のうち、前記仮想壁と前記左右一対の走行装置の接地面とに交差し、前記左右一対の走行装置の中点を通る平面より、前記仮想壁に近づく方向に存在する側の部分を、前記仮想壁に近づく部分として特定する、
請求項9に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、システム、方法およびプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
作業機械の動作範囲を制限するために、空間に仮想壁を設定する技術が知られている。
作業機械の制御装置は、仮想壁と作業機械との距離に応じて作業機械のアクチュエータの動作量を制限することで、作業機械が仮想壁を超えないよう制御することができる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/189030号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業機械を移動させるための走行装置を備える作業機械については、走行移動によって作業機械が設定した仮想壁を超えないよう制御する必要がある。
本開示の目的は、作業機械が進入禁止区域に侵入しないよう制御することができるシステム、方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0005】
本開示の一態様によれば、作業機械を制御するためのシステムは、プロセッサを備える。プロセッサは、作業機械の侵入を禁止する面である仮想壁を特定する。プロセッサは、仮想壁に基づいて、作業機械の走行速度を制御する。
【発明の効果】
【0006】
上記態様によれば、システムは、作業機械が進入禁止区域に侵入しないよう制御することができる。
【図面の簡単な説明】
【0007】
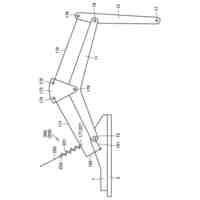
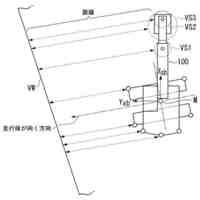
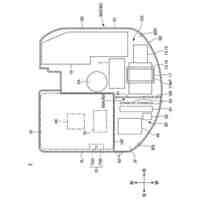
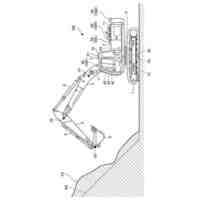
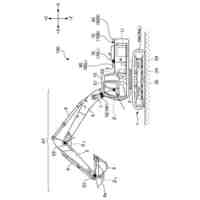
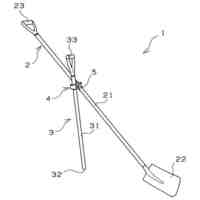
第1の実施形態に係る作業機械の構成を示す概略図である。
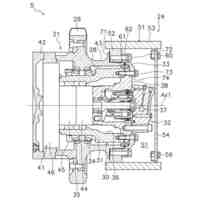
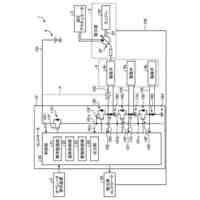
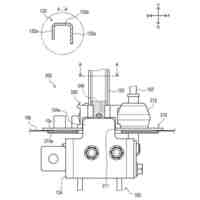
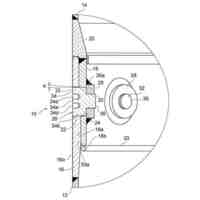
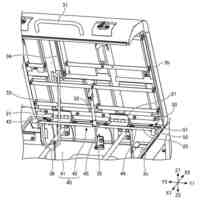
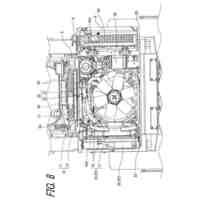
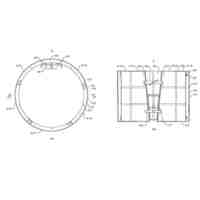
第1の実施形態に係る作業機械の駆動系を示す図である。
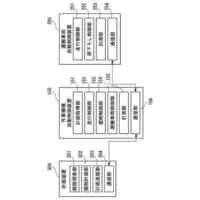
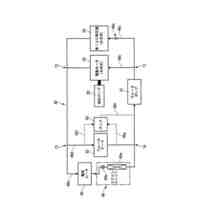
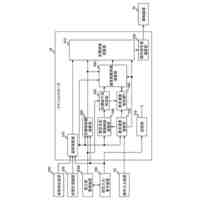
第1の実施形態に係る制御装置の構成を示す概略ブロック図である。
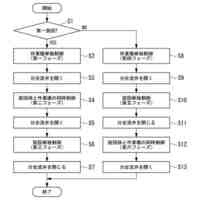
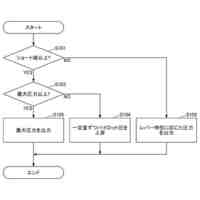
第1の実施形態に係る制御装置による介入制御を示すフローチャートである。
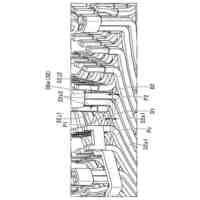
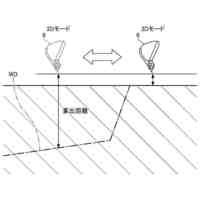
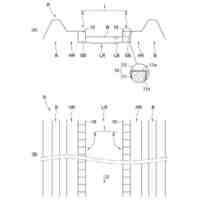
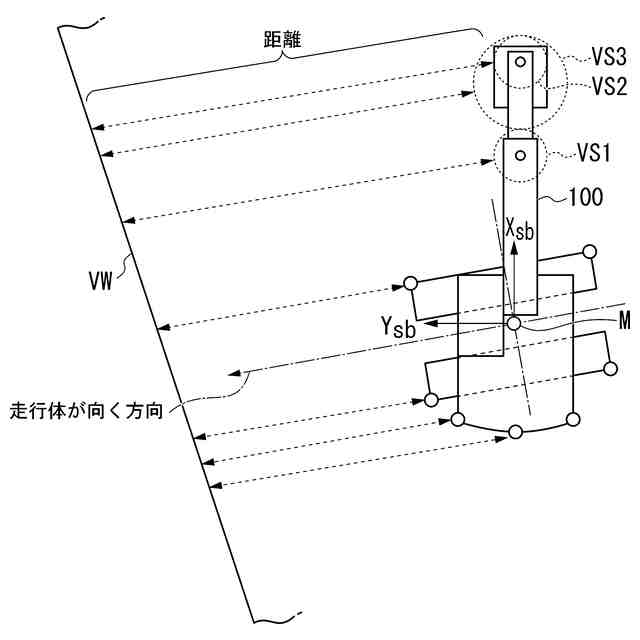
第1の実施形態に係る制御装置による制御点および仮想球と仮想壁との距離の求め方を示す図である。
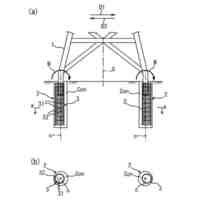
第1の実施形態に係る作業機械の走行体が旋回する際の干渉判定対象の特定方法を示す図である。
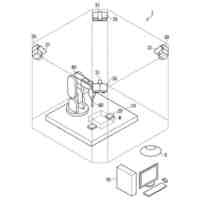
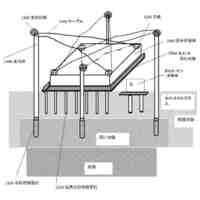
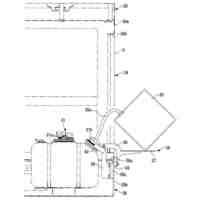
他の実施形態に係る作業システムの構成を示す図である。
【発明を実施するための形態】
【0008】
〈第1の実施形態〉
《作業機械の構成》
以下、図面を参照しながら実施形態について詳しく説明する。
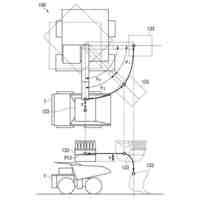
図1は、第1の実施形態に係る作業機械100の構成を示す概略図である。第1の実施形態に係る作業機械100は、例えば油圧ショベルである。作業機械100は、車体110、作業機160、運転室180、制御装置200を備える。第1の実施形態に係る作業機械100は、作業現場の進入禁止区域を画定するために仮想的に生成された仮想壁VWに基づいて、仮想壁VWに接触しないように制御される。これにより、オペレータは、進入禁止区域に侵入しないように作業機械100を操作することができる。
【0009】
車体110は、走行体120と旋回体140とを備える。
走行体120は、作業機械100を走行可能に支持する。走行体120は、左右一対の走行装置を備える。走行体120は、例えば、走行装置として履帯121を備える。履帯121は、それぞれ駆動輪である走行モータ114を有する。走行モータ114は、履帯121を回転させる。走行モータ114が履帯121を回転させることにより、作業機械100は走行または旋回する。
作業機械100は、左右の履帯121を同じ方向へ速度に差をつけて回転させることにより、前進または後退しながら円弧状に進路を変更することができる。また、作業機械100は、左右の履帯121の一方をのみを回転させることにより、停止側の履帯を軸として信地旋回をすることができる。また、作業機械100は、左右の履帯121を互いに異なる方向に等速回転させることにより、走行体120の中心を軸として超信地旋回をすることができる。
【0010】
旋回体140は、走行体120に旋回中心回りに旋回可能に支持される。
作業機160は、旋回体140に動作可能に支持される。作業機160は、油圧により駆動する。作業機160は、ブーム161、アーム162、および作業具であるアタッチメント163を備える。アタッチメント163は作業具の一例である。図1に示す例におけるアタッチメント163は、バケットである。ブーム161の基端部は、旋回体140に回動可能に取り付けられる。アーム162の基端部は、ブーム161の先端部に回動可能に取り付けられる。アタッチメント163は、アーム162の先端部に回動可能に取り付けられる。ここで、旋回体140のうち作業機160が取り付けられる部分を前部という。また、旋回体140について、前部を基準に、反対側の部分を後部、左側の部分を左部、右側の部分を右部という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械
5日前
株式会社小松製作所
作業機械の履帯式走行装置
1日前
株式会社小松製作所
制御システムおよび作業機械
23日前
株式会社小松製作所
ステータ、回転電機及び作業機械
23日前
株式会社小松製作所
システム、方法およびプログラム
23日前
株式会社小松製作所
計画装置、作業機械、運搬車両および計画方法
24日前
株式会社小松製作所
加工機械、加工機械の制御装置および加工機械の制御方法
24日前
株式会社小松製作所
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
24日前
株式会社小松製作所
作業機械、及び、作業機械用の電動パワートレインユニット
23日前
株式会社小松製作所
作業機械及び作業機械の制御方法
8日前
株式会社小松製作所
積込機械の制御装置及び制御方法
16日前
個人
耐震原子炉設備
1か月前
個人
簡易免震構造
8日前
鹿島建設株式会社
基礎構造
1か月前
株式会社竹中工務店
建築方法
1か月前
株式会社クボタ
作業車
24日前
株式会社富田製作所
継手部構造
1か月前
住友建機株式会社
ショベル
23日前
住友建機株式会社
作業機械
25日前
住友建機株式会社
ショベル
24日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
24日前
住友建機株式会社
作業機械
23日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
24日前
日本車輌製造株式会社
建設機械
23日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
1か月前
株式会社久保製作所
河川構造物
9日前
日本車輌製造株式会社
建設機械
1日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
3日前
株式会社クボタ
作業機
1か月前
エバタ株式会社
下水道施設の再構築方法
1か月前
大仲建設株式会社
スコップ
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ