TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107331
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025076030,2021077392
出願日
2025-05-01,2021-04-30
発明の名称
積込機械の制御装置及び制御方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
3/43 20060101AFI20250710BHJP(水工;基礎;土砂の移送)
要約
【課題】積込機械の自動積込制御の後に、掘削を開始するために適切な位置にバケットを移動させる。
【解決手段】開始角度特定部は、積込機械の積込開始時の旋回体の角度である開始角度を特定する。移動制御部は、バケットが積込目標の上方の積込点に到達した後に、旋回体の角度が開始角度になるまで旋回体を駆動させる操作信号を出力し、旋回体に対するバケットの姿勢が、積込開始時のバケットの姿勢とは別に予め設定された目標姿勢になるまで、作業機を駆動させる操作信号を出力する。
【選択図】図6
特許請求の範囲
【請求項1】
旋回中心回りに旋回する旋回体と、前記旋回体を支持する支持部と、バケットを有し前記旋回体に取り付けられた作業機とを備える積込機械の制御装置であって、
前記積込機械の積込開始時の前記旋回体の角度である開始角度を特定する開始角度特定部と、
前記旋回体および前記作業機を駆動させるための操作信号を生成する移動制御部と、
を備え、
前記移動制御部は、前記バケットが積込目標の上方の積込点に到達した後に、前記旋回体の角度が前記開始角度になるまで前記旋回体を駆動させる操作信号を出力し、前記旋回体に対する前記バケットの姿勢が、前記積込開始時の前記バケットの姿勢とは別に予め設定された目標姿勢になるまで、前記作業機を駆動させる操作信号を出力する
積込機械の制御装置。
続きを表示(約 760 文字)
【請求項2】
前記開始角度は、前記積込機械の自動積込制御の開始時の前記旋回体の角度であって、
前記移動制御部は、
前記自動積込制御を開始すると、前記バケットが前記積込点に到達するまで前記旋回体及び前記作業機を駆動させて前記バケットを前記積込点に移動させる操作信号を出力する 請求項1に記載の積込機械の制御装置。
【請求項3】
前記目標姿勢に係る前記バケットの位置は、前記支持部に外接する仮想円柱と干渉しない位置である
請求項1または請求項2に記載の積込機械の制御装置。
【請求項4】
上方からの平面視において前記バケットと前記積込目標とが重なっているときに、前記バケットを駆動させてダンプ動作を実行させる操作信号を出力するダンプ制御部を備え、
前記移動制御部は、前記ダンプ動作の実行中に前記操作信号を出力する
請求項1から請求項3の何れか1項に記載の積込機械の制御装置。
【請求項5】
旋回中心回りに旋回する旋回体と、前記旋回体を支持する支持部と、バケットを有し前記旋回体に取り付けられた作業機とを備える積込機械の制御方法であって、
前記積込機械の積込開始時の前記旋回体の角度である開始角度を特定するステップと、
前記バケットが積込目標の上方の積込点に到達した後に、前記旋回体の角度が前記開始角度になるまで前記旋回体を駆動させる操作信号を出力するステップと、
前記バケットが前記積込点に位置するときに、前記旋回体に対する前記バケットの姿勢が、前記積込開始時の前記バケットの姿勢とは別に予め設定された目標姿勢になるまで、前記作業機を駆動させる操作信号を出力するステップと
を備える積込機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、積込機械の制御装置及び制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、積込機械の半自動制御に関する技術が開示されている。特許文献1に係る半自動制御は、ダンプトラックなどの積込目標に対する積込完了後に、オペレータから掘削指示を受け付け、制御装置が積込機械の旋回及び作業機の駆動を制御することで、自動掘削を行う制御である。
【先行技術文献】
【特許文献】
【0003】
特開2020-041352号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、オペレータによる掘削操作後に、次の掘削位置までバケットを移動させる場合に、バケットを積込開始時の位置に戻すことが考えられる。しかしながら、積込開始時の位置はオペレータによる掘削操作の完了時にバケットが存在した位置であるため、掘削の開始時の位置として適切でない可能性がある。
本開示の目的は、積込機械の自動制御により、掘削を開始するために適切な位置にバケットを移動させることができる積込機械の制御装置及び制御方法を提供することにある。
【課題を解決するための手段】
【0005】
本開示の一態様によれば、積込機械の制御装置は、旋回中心回りに旋回する旋回体と、前記旋回体を支持する支持部と、バケットを有し前記旋回体に取り付けられた作業機とを備える積込機械の制御装置であって、前記積込機械の積込開始時の前記旋回体の角度である開始角度を特定する開始角度特定部と、前記旋回体および前記作業機を駆動させるための操作信号を生成する移動制御部と、を備え、前記移動制御部は、前記バケットが積込目標の上方の積込点に到達した後に、前記旋回体の角度が前記開始角度になるまで前記旋回体を駆動させる操作信号を出力し、前記旋回体に対する前記バケットの姿勢が、前記積込開始時の前記バケットの姿勢とは別に予め設定された目標姿勢になるまで、前記作業機を駆動させる操作信号を出力する。
【発明の効果】
【0006】
上記態様によれば、積込機械の制御装置は、積込機械の自動制御により、掘削を開始するために適切な位置にバケットを移動させることができる。
【図面の簡単な説明】
【0007】
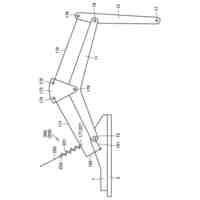
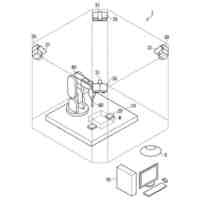
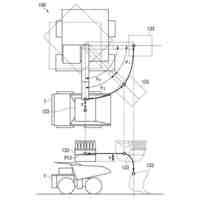
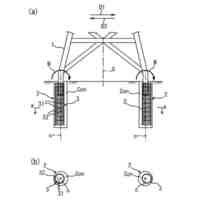
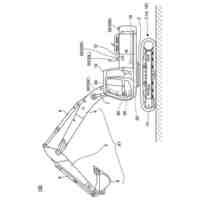
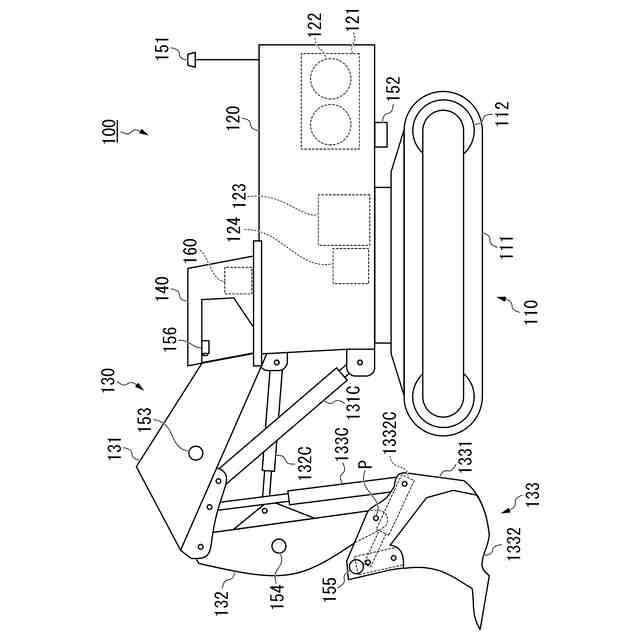
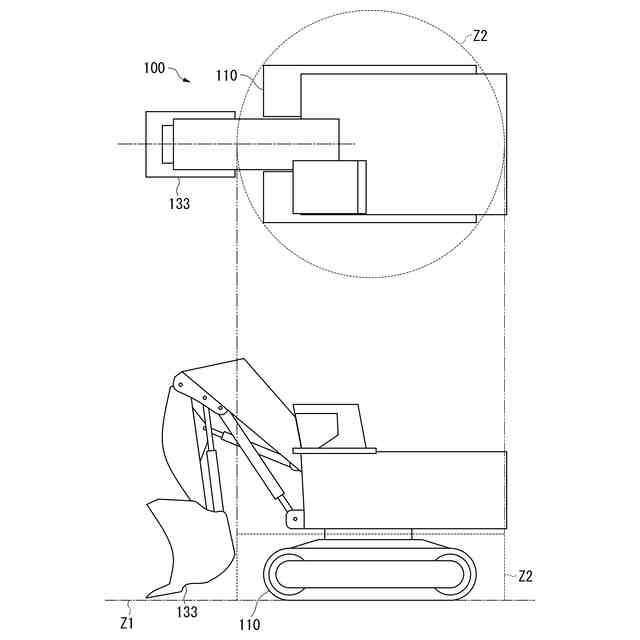
第1の実施形態に係る積込機械の構成を示す概略図である。
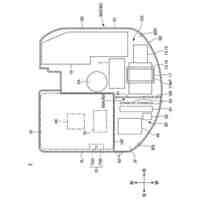
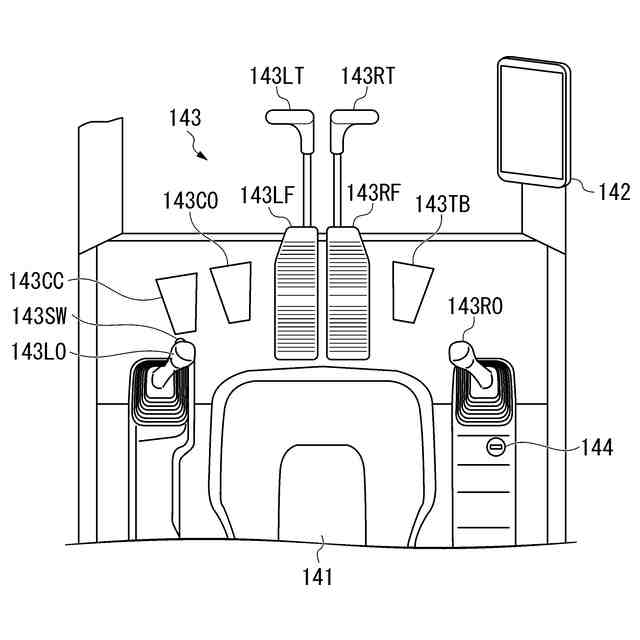
第1の実施形態に係る運転室の内部の構成を示す図である。
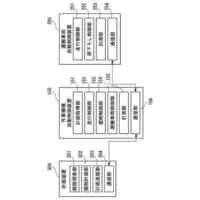
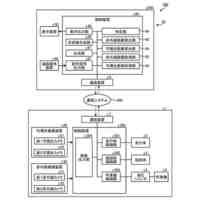
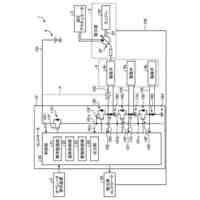
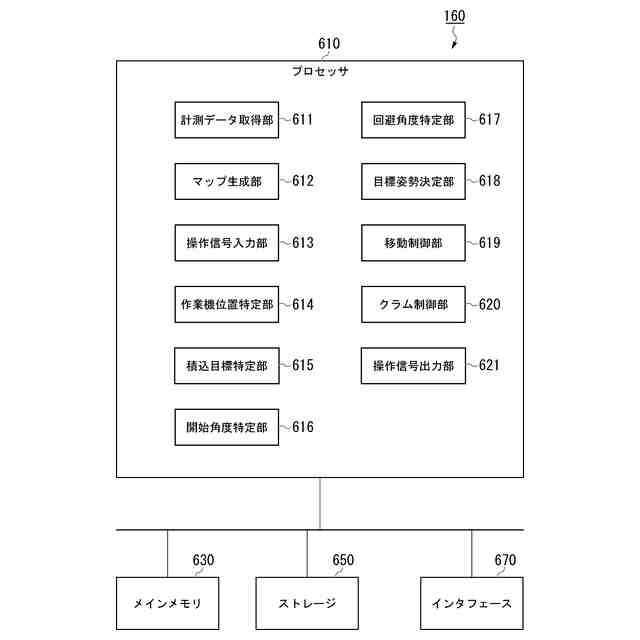
第1の実施形態に係る制御装置の構成を示す概略ブロック図である。
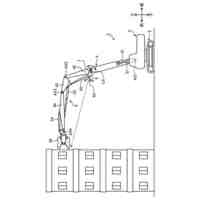
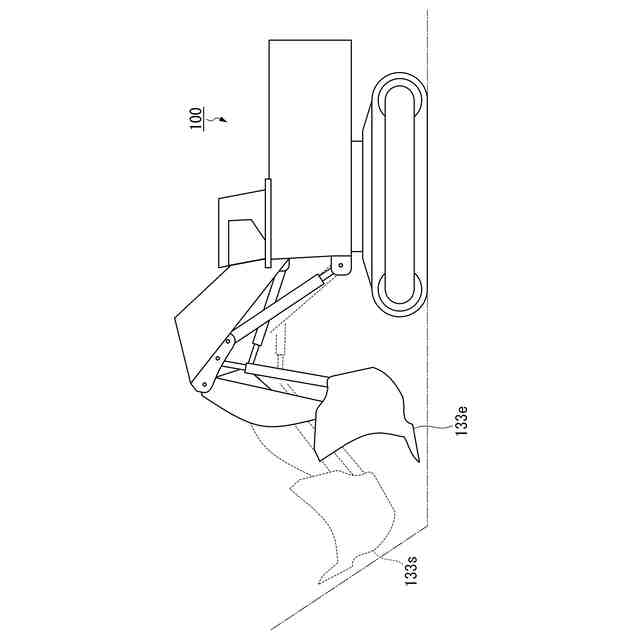
第1の実施形態に係る作業機の掘削開始時の目標姿勢の例を示す図である。
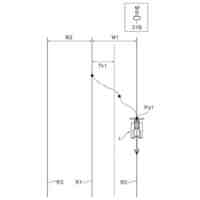
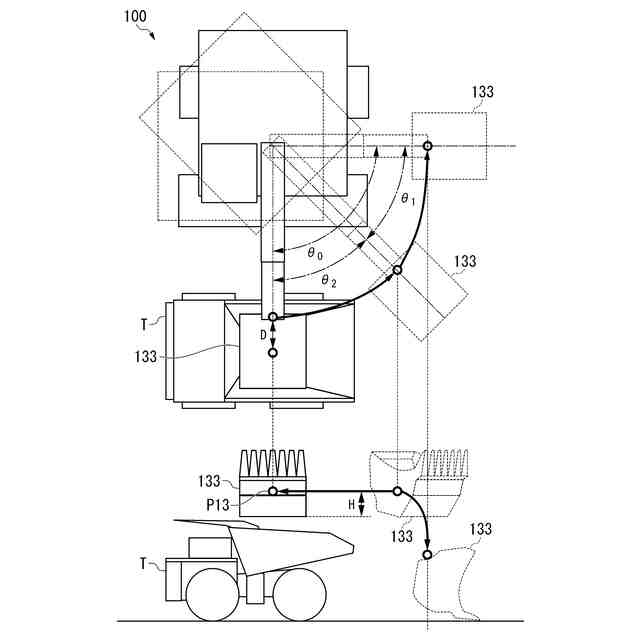
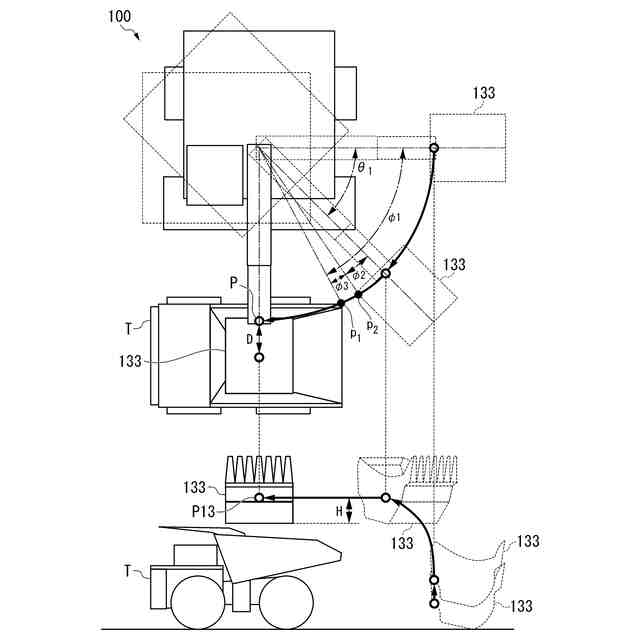
第1の実施形態に係る自動積込制御開始から排土開始までの積込機械の動きの例を示す図である。
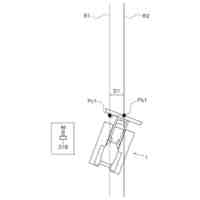
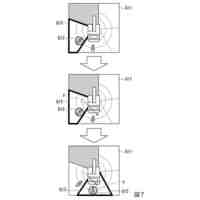
第1の実施形態に係る排土開始から自動積込制御終了までの積込機械の動きの例を示す図である。
第1の実施形態における自動積込制御の開始時の作業機の姿勢と自動積込制御の終了時の作業機の姿勢とを対比する図である。
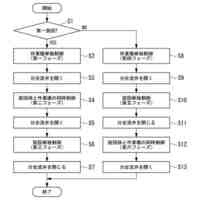
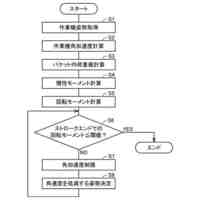
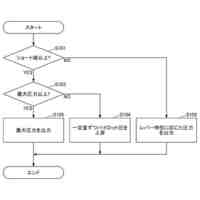
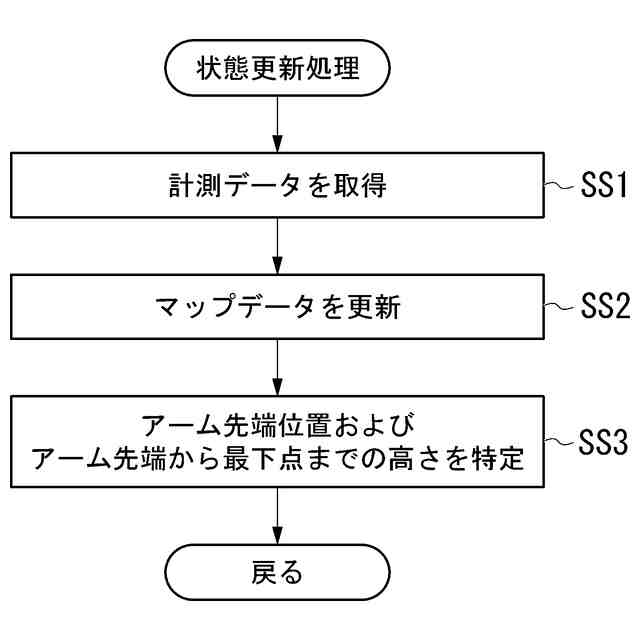
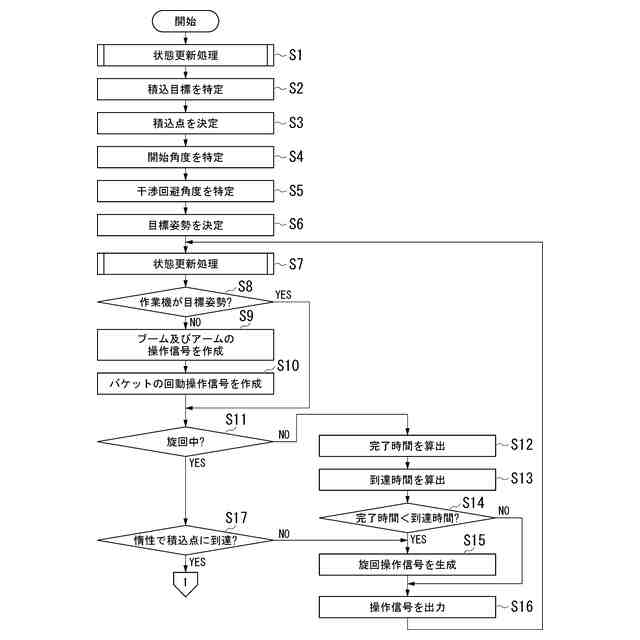
第1の実施形態に係る制御装置の動作を示すフローチャートである。
第1の実施形態に係る自動積込制御開始から排土開始までの制御装置の動作を示すフローチャートである。
第1の実施形態に係る排土開始から自動積込制御終了までの制御装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0008】
〈第1の実施形態〉
以下、図面を参照しながら実施形態について詳しく説明する。
【0009】
《積込機械100の構成》
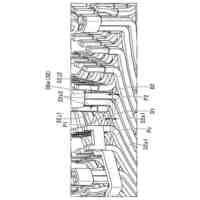
図1は、第1の実施形態に係る積込機械100の構成を示す概略図である。
積込機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、ダンプトラックなどの積込目標Tに積み込む。第1の実施形態に係る積込機械100は、フェイスショベルである。なお、他の実施形態に係る積込機械100は、バックホウショベルやロープショベルであってよい。積込機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。
【0010】
走行体110は、積込機械100を走行可能に支持する。走行体110は、左右に設けられた2つの無限軌道111と、各無限軌道111を駆動するための2つの走行モータ112を備える。
旋回体120は、走行体110に旋回中心回りに旋回可能に支持される。
作業機130は、油圧により駆動する。作業機130は、旋回体120の前部に上下方向に駆動可能に支持される。運転室140は、オペレータが搭乗し、積込機械100の操作を行うためのスペースである。運転室140は、旋回体120の左前部に設けられる。 ここで、旋回体120のうち作業機130が取り付けられる部分を前部という。また、旋回体120について、前部を基準に、反対側の部分を後部、左側の部分を左部、右側の部分を右部という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械
2日前
株式会社小松製作所
作業機械
28日前
株式会社小松製作所
作業機械
21日前
株式会社小松製作所
蓋開閉装置
1か月前
株式会社小松製作所
作業車両の昇降ステップ
1か月前
株式会社小松製作所
制御システムおよび作業機械
20日前
株式会社小松製作所
ステータ、回転電機及び作業機械
20日前
株式会社小松製作所
システム、方法およびプログラム
20日前
株式会社小松製作所
作業機械および作業機械の制御方法
22日前
株式会社小松製作所
作業機械、散水装置、及び散水システム
22日前
株式会社小松製作所
計画装置、作業機械、運搬車両および計画方法
21日前
株式会社小松製作所
加工機械、加工機械の制御装置および加工機械の制御方法
21日前
株式会社小松製作所
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
21日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
21日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
21日前
株式会社小松製作所
作業機械、及び、作業機械用の電動パワートレインユニット
20日前
株式会社小松製作所
表示システム及び表示方法
29日前
株式会社小松製作所
作業機械及び作業機械の制御方法
5日前
株式会社小松製作所
積込機械の制御装置及び制御方法
13日前
株式会社小松製作所
作業機械の障害物報知システムおよび作業機械の障害物報知方法
1か月前
個人
耐震原子炉設備
1か月前
個人
簡易免震構造
5日前
FKS株式会社
擁壁
1か月前
株式会社forch
土採取装置
1か月前
鹿島建設株式会社
基礎構造
29日前
株式会社クボタ
作業車
21日前
株式会社竹中工務店
建築方法
27日前
株式会社竹中工務店
杭基礎構造
1か月前
株式会社富田製作所
継手部構造
29日前
住友建機株式会社
作業機械
22日前
住友建機株式会社
作業機械
20日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
20日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ