TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091751
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207192
出願日
2023-12-07
発明の名称
柔軟体の形状検出装置、柔軟体の形状検出方法、柔軟体の形状制御方法、プログラム、記録媒体
出願人
国立大学法人 筑波大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01B
21/20 20060101AFI20250612BHJP(測定;試験)
要約
【課題】線状柔軟体の少なくとも一端に設けた力覚センサによって、簡易な構成で、リアルタイムに線状柔軟体の形状を検出することが可能な線状柔軟体の形状検出装置、線状柔軟体の形状検出方法、線状柔軟体の形状制御方法、プログラム、記録媒体を提供する。
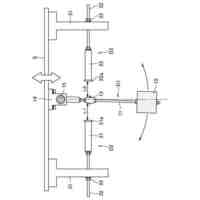
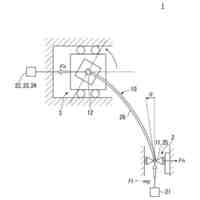
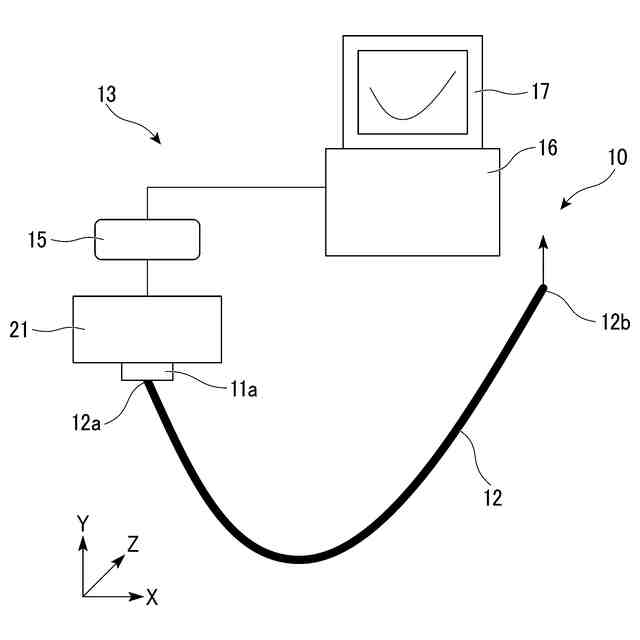
【解決手段】三次元方向にそれぞれ加わる荷重およびトルクを検出する力覚センサと、一端が前記力覚センサに接続された柔軟体と、前記柔軟体の一端から前記力覚センサに加わる前記荷重の情報および前記トルクの情報に基づいて、前記柔軟体の一端から他端までの延長方向に沿った形状を算出する演算部と、を有することを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
三次元方向にそれぞれ加わる荷重およびトルクを検出する力覚センサと、
一端が前記力覚センサに接続された柔軟体と、
前記柔軟体の一端から前記力覚センサに加わる前記荷重の情報および前記トルクの情報に基づいて、前記柔軟体の一端から他端までの延長方向に沿った形状を算出する演算部と、を有することを特徴とする柔軟体の形状検出装置。
続きを表示(約 1,400 文字)
【請求項2】
前記力覚センサは、互いに直角なX軸,Y軸,Z軸の三次元方向にそれぞれ沿った前記荷重と、X軸,Y軸,Z軸周りのそれぞれの回転力とを検出する6軸力覚センサであることを特徴とする請求項1に記載の柔軟体の形状検出装置。
【請求項3】
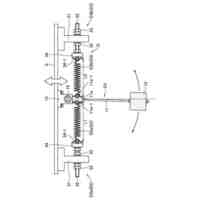
前記柔軟体の他端にも、更に前記力覚センサが接続されることを特徴とする請求項1または2に記載の柔軟体の形状検出装置。
【請求項4】
前記柔軟体は、延長方向が一様な弾性力を有する線状柔軟体であることを特徴とする請求項1または2に記載の柔軟体の形状検出装置。
【請求項5】
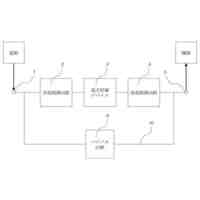
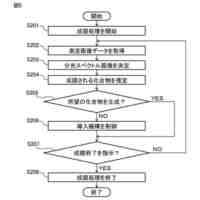
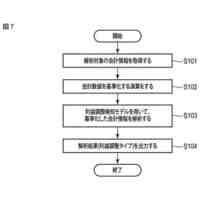
柔軟体から力覚センサに加わる三次元方向の荷重の情報、および柔軟体から力覚センサに加わる三次元方向のトルクの情報を検出するステップ1と、
前記ステップ1で得られた前記荷重の情報および前記トルクの情報から、重力ポテンシャル極小条件に基づいて、前記柔軟体の一端から他端までの間の途中の位置を計算し、前記柔軟体の一端から他端までの三次元方向における形状データを得るステップ2と、
前記ステップ2で得られた三次元方向における形状データの情報から、前記柔軟体を複数の区間に分割した分割区間ごとの三次元方向における角度を計算するステップ3と、
を少なくとも備えたことを特徴とする柔軟体の形状検出方法。
【請求項6】
請求項5の柔軟体の形状検出方法によって得られた前記柔軟体の形状データに基づいて、前記柔軟体の重心を計算するステップ4と、
前記ステップ4で得られた前記柔軟体の重心に基づいて、前記柔軟体の重心を制御して、前記柔軟体の延長方向に沿った形状を制御するステップ5と、
を少なくとも備えたことを特徴とする請求項5に記載の柔軟体の形状制御方法。
【請求項7】
コンピュータに対して、
柔軟体から力覚センサに加わる三次元方向の荷重の情報、および柔軟体から力覚センサに加わる三次元方向のトルクの情報を検出するステップ1と、
前記ステップ1で得られた前記荷重の情報および前記トルクの情報から、重力ポテンシャル極小条件に基づいて、前記柔軟体の一端から他端までの間の途中の位置を計算し、前記柔軟体の一端から他端までの三次元方向における形状データを得るステップ2と、
前記ステップ2で得られた三次元方向における形状データの情報から、前記柔軟体を複数の区間に分割した分割区間ごとの三次元方向における角度を計算するステップ3と、
の各段階を実行させることを特徴とするプログラム。
【請求項8】
コンピュータに対して、
柔軟体から力覚センサに加わる三次元方向の荷重の情報、および柔軟体から力覚センサに加わる三次元方向のトルクの情報を検出するステップ1と、
前記ステップ1で得られた前記荷重の情報および前記トルクの情報から、重力ポテンシャル極小条件に基づいて、前記柔軟体の一端から他端までの間の途中の位置を計算し、前記柔軟体の一端から他端までの三次元方向における形状データを得るステップ2と、
前記ステップ2で得られた三次元方向における形状データの情報から、前記柔軟体を複数の区間に分割した分割区間ごとの三次元方向における角度を計算するステップ3と、
の各段階を実行させるプログラムを記録したことを特徴とする記録媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、柔軟体の形状検出装置、柔軟体の形状検出方法、柔軟体の形状制御方法、プログラム、記録媒体に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、延長方向(長手方向)に沿った弾性力が小さい紐、ロープ、チェーン、ワイヤなど、一端と他端を支持して垂ませて吊り下げるとカテナリー曲線を描くような線状の柔軟体の形状を、リアルタイムに把握することは困難であった。こうした、柔軟体の形状を簡易な方法で把握することができれば、例えば、生産現場などにおいて、製造物を吊下するワイヤやロープなどの形状を把握して、効率的、かつ安全に吊下物を移動させたり、あるいは、紐やロープなどで構成されるソフトロボットの形状制御に適用することができる。
【0003】
従来、線状の柔軟体の形状を把握する方法として、例えば、非特許文献1には、視覚センサを用いて、線状柔軟物体の変形形状より物体にかかる力を推定して、物体の接触状態を検出する方法が開示されている。また、例えば非特許文献2には、カメラなどの撮像装置を用いて、ゴムやワイヤなどの線状柔軟物体の変形をモデリングする方法が開示されている。
【先行技術文献】
【非特許文献】
【0004】
Hirofumi Nakagaki, Kosei Kitagaki, Tsukasa Ogasawara and Hideo Tsukune., Estimation of a Force Acting on a Flexible Wire by Using Visual Tracking and Its Application to Insertion Task, 日本ロボット学会誌 Vol.15 No.3,pp.422~430,1997
Takahiro Wada, Hidefumi Wakamatsu, Brenan J. McCarragher, Shinichi Hirai, and Takeshi Yonezawa., Modeling of Shape Bifurcation Phenomena in Manipulations of DeformableString Objects, 精密工学会 第5回知能メカトロニクスワークショップ講演論文集, pp.57-62, 2000
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、非特許文献1、2に開示された線状柔軟体の形状を検出する方法は、いずれも視覚センサやカメラなどの画像情報に基づいて行うものであり、検出装置が複雑で、かつデータ量の大きな画像情報を用いる必要があり、リアルタイムで迅速に柔軟体の形状を検出することが困難であった。また、カメラと線状柔軟体の間に障害物がある場合には、形状を検出できない(オクルージョン)という問題があった。
【0006】
この発明は上記課題に鑑みて提案されたものであり、柔軟体の少なくとも一端に設けた力覚センサによって、簡易な構成で、リアルタイムに柔軟体の形状を検出することが可能な柔軟体の形状検出装置、柔軟体の形状検出方法、柔軟体の形状制御方法、プログラム、記録媒体を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者らは、力覚センサの情報に基づいて、リアルタイム計算が可能なシンプルな計算方法によって、柔軟体の少なくとも一端に接合される力覚センサの情報だけで、柔軟体の一端から他端までの形状をリアルタイムで推定する方法を見出した。
【0008】
(1)本発明の態様1の柔軟体の形状検出装置は、三次元方向にそれぞれ加わる荷重およびトルクを検出する力覚センサと、一端が前記力覚センサに接続された柔軟体と、前記柔軟体の一端から前記力覚センサに加わる前記荷重の情報および前記トルクの情報に基づいて、前記柔軟体の一端から他端までの延長方向に沿った形状を算出する演算部と、を有することを特徴とする。
【0009】
(2)本発明の態様2の柔軟体の形状検出装置は、態様1において、前記力覚センサは、互いに直角なX軸,Y軸,Z軸の三次元方向にそれぞれ沿った前記荷重と、X軸,Y軸,Z軸周りのそれぞれの回転力とを検出する6軸力覚センサであることを特徴とする。
【0010】
(3)本発明の態様3の柔軟体の形状検出装置は、態様1または2において、前記柔軟体の他端にも、更に前記力覚センサが接続されることを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 筑波大学
制振機構
2日前
国立大学法人 筑波大学
制振機構
2日前
国立大学法人 筑波大学
制振機構
2日前
国立大学法人 筑波大学
表面検査方法
4か月前
国立大学法人 東京大学
せん妄判定方法
1か月前
国立大学法人 筑波大学
電力平準化装置
4か月前
国立大学法人 筑波大学
超音波検査装置
28日前
国立大学法人 筑波大学
麹菌組織物の製造方法
1か月前
国立大学法人東京海洋大学
熱電池用電解液、熱電池
6か月前
亀田製菓株式会社
骨強化剤
7か月前
国立大学法人 筑波大学
測定装置、観察システム、及び測定方法
2か月前
国立大学法人 筑波大学
測定方法、測定装置、及び観察システム
2か月前
国立大学法人 筑波大学
フィラグリン遺伝子型決定法およびキット
2か月前
国立大学法人 筑波大学
振り子装置、制振装置及び制振装置の設計方法
6か月前
国立大学法人 筑波大学
微生物、植物成長補助剤、及び植物の生育方法
3か月前
国立大学法人 筑波大学
オンサイト参加システム及びオンサイト参加方法
2か月前
国立大学法人 筑波大学
補正装置、撮影装置、補正方法および撮影システム
1か月前
NTT株式会社
映像処理装置、方法及びプログラム
2日前
NTT株式会社
推論装置、推論方法、及びプログラム
1か月前
国立大学法人 筑波大学
紙及びその製造方法並びに紙用改質剤及びその製造方法
5か月前
国立大学法人 筑波大学
モデル図作成方法、情報処理システムおよびプログラム
7か月前
NTT株式会社
情報処理装置、方法およびプログラム
20日前
NTT株式会社
データ解析装置、方法およびプログラム
20日前
国立大学法人 筑波大学
慣性力設定装置、慣性力設定システム及び慣性力設定方法
1か月前
国立大学法人 筑波大学
反応性スパッタリング方法及び反応性スパッタリングシステム
21日前
国立大学法人 筑波大学
表面検査装置
3か月前
三菱重工業株式会社
水素吸蔵材料、水素放出・貯蔵システム
6か月前
NTT株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
国立大学法人 筑波大学
酸素飽和度イメージング内視鏡を用いた潰瘍性大腸炎活動性評価
5か月前
株式会社サンワイズ
生体情報生成方法及び生体情報管理システム
5か月前
国立大学法人 筑波大学
会計情報解析方法、会計情報解析装置及び会計情報解析プログラム
12日前
国立大学法人 筑波大学
判定装置、選択装置、判定システム、判定方法、選択方法及びプログラム
5か月前
国立大学法人 筑波大学
糸状菌のスクリーニング方法及び糸状菌用培養条件のスクリーニング方法
4か月前
国立大学法人 筑波大学
ヒト化抗DNAM-1抗体
1か月前
東洋紡株式会社
SARS-CoV-2検出用プローブセット及びその用途
6か月前
一般財団法人日本気象協会
情報処理装置、情報処理方法、及びプログラム
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ