TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091982
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207583
出願日
2023-12-08
発明の名称
塵芥滞留量把握システム、塵芥滞留量把握方法及び塵芥滞留量把握プロブラム
出願人
中国電力株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
G01V
8/10 20060101AFI20250612BHJP(測定;試験)
要約
【課題】湖面上に滞留する塵芥の滞留量を正確に把握して、適時に塵芥を回収することを可能とする塵芥滞留量把握システム、塵芥滞留量把握方法及び塵芥滞留量把握プロブラムを提供する。
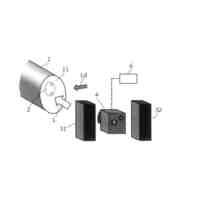
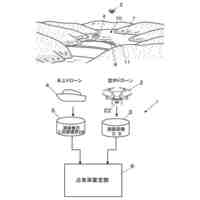
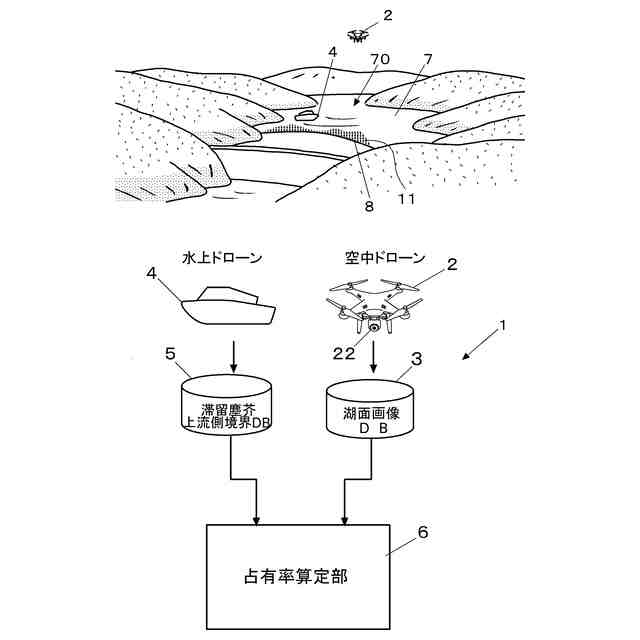
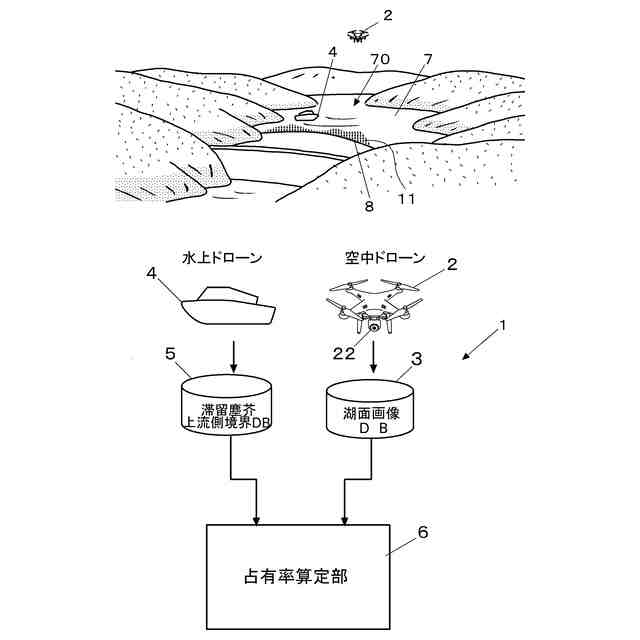
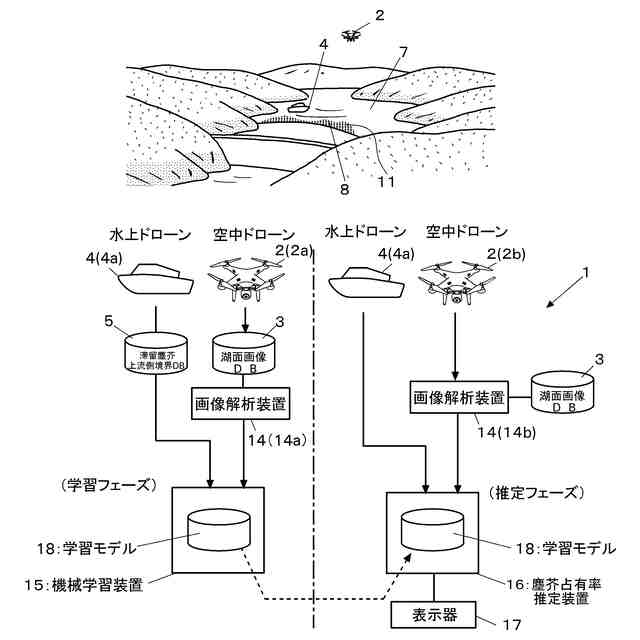
【解決手段】湖面7に設置された網場8の上流側の所定の探索エリアに滞留する塵芥11の滞留量を把握するに当たり、空中ドローン2によって探索エリアを上空から撮影した第1撮影画像と、探索エリアに塵芥が無い場合に空中移動体によって探索エリアを上空から撮影した第2撮影画像と、水上ドローン4を湖面の網場8の上流側で網場8に沿って移動させ、その移動させる過程において水上ドローン4から網場8に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって特定された探索エリアに滞留する塵芥の上流側境界と、を用いて探索エリアの塵芥の占有率を算定する。
【選択図】 図1
特許請求の範囲
【請求項1】
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握システムであって、
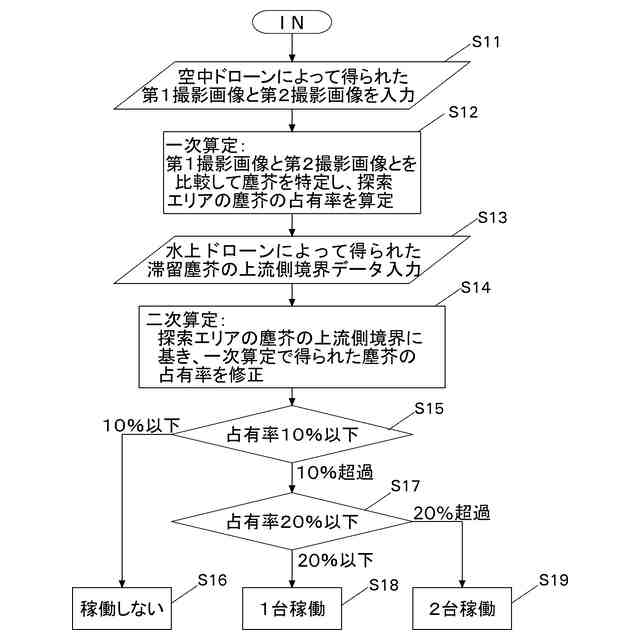
空中移動体によって前記探索エリアを上空から撮影した第1撮影画像を、前記探索エリアに塵芥が無い場合に前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と比較して得られた情報に基づき前記探索エリアに滞留する塵芥の占有率を算定する一次算定手段と、
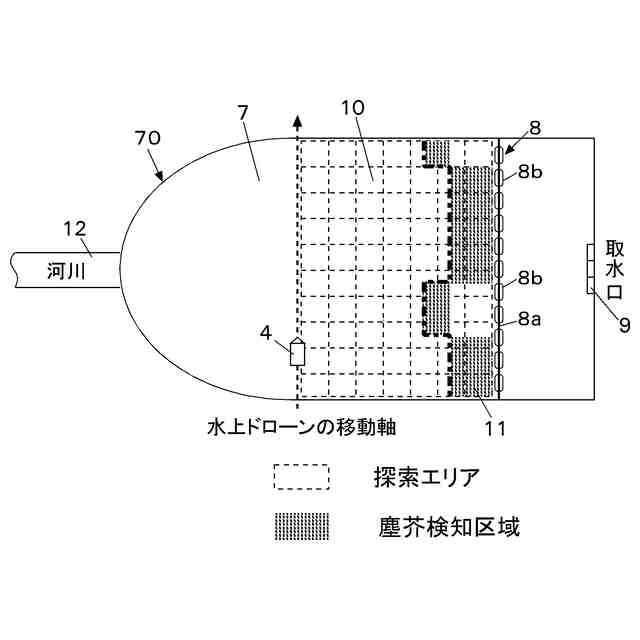
前記第1撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって前記探索エリアに滞留する塵芥の上流側境界を特定し、その上流側境界に基づき前記一次算定手段によって算定された塵芥の占有率を修正する二次算定手段と、
を具備することを特徴とする塵芥滞留量把握システム。
続きを表示(約 3,800 文字)
【請求項2】
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握システムであって、
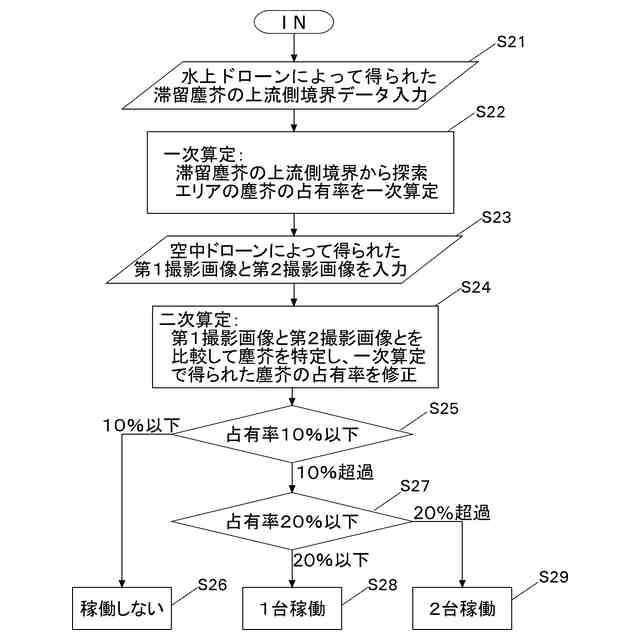
水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって前記探索エリアに滞留する塵芥の上流側境界を特定し、その上流側境界に基づき前記探索エリアに滞留する塵芥の占有率を算定する一次算定手段と、
前記水上移動体を前記網場に沿って湖面を移動させる時刻とほぼ同時刻において、空中移動体によって前記探索エリアを上空から撮影した第1撮影画像を、前記探索エリアに塵芥が無い場合に前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と比較して得られた情報に基づき前記一次算定手段によって算定された塵芥の占有率を修正する二次算定手段と
を具備することを特徴とする塵芥滞留量把握システム。
【請求項3】
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握システムであって、
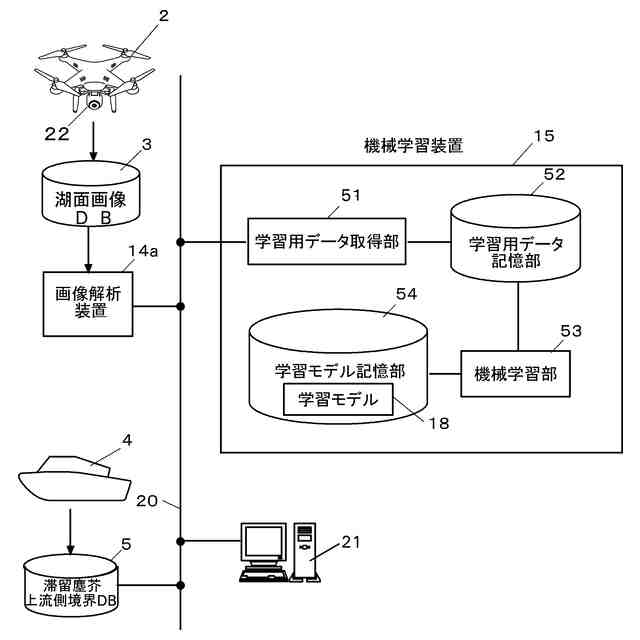
前記探索エリアに塵芥がある時点での空中移動体によって前記探索エリアを上空から撮影した第1撮影画像と、前記探索エリアに塵芥が無い時点での前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と、を格納する湖面画像データベースと、
前記第1撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって得られた前記探索エリアに滞留する塵芥の上流側境界のデータを格納する滞留塵芥上流側境界データベースと、
を備え、
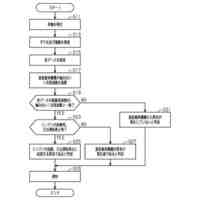
前記湖面画像データベースに格納された前記第1撮影画像と前記第2撮影画像を比較して得られた比較データと、前記第1撮影画像の撮影時刻とほぼ同時刻において得られた前記滞留塵芥上流側境界データベースに格納された前記探索エリアに滞留する塵芥の上流側境界のデータと、を含む入力データと、前記第1撮影画像の撮影時刻とほぼ同時刻において前記探索エリアに滞留している塵芥を確認した際の塵芥の占有率を含む出力データと、の相関関係を機械学習させた学習モデルを記憶する学習モデル記憶部と、
空中移動体によって前記探索エリアを上空から撮影した推定用撮影画像と前記湖面画像データベースに格納された前記第2撮影画像とを比較して得られた比較データと、前記推定用撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって得られた前記探索エリアに滞留する塵芥の上流側境界のデータと、を含む推定用入力データを取得する入力データ取得部と、
前記入力データ取得部により取得された前記推定用入力データを前記学習モデルに入力して、前記湖面の前記探索エリアに滞留する塵芥の占有率を推定する塵芥占有率推定部と、
を有することを特徴とする塵芥滞留量把握システム。
【請求項4】
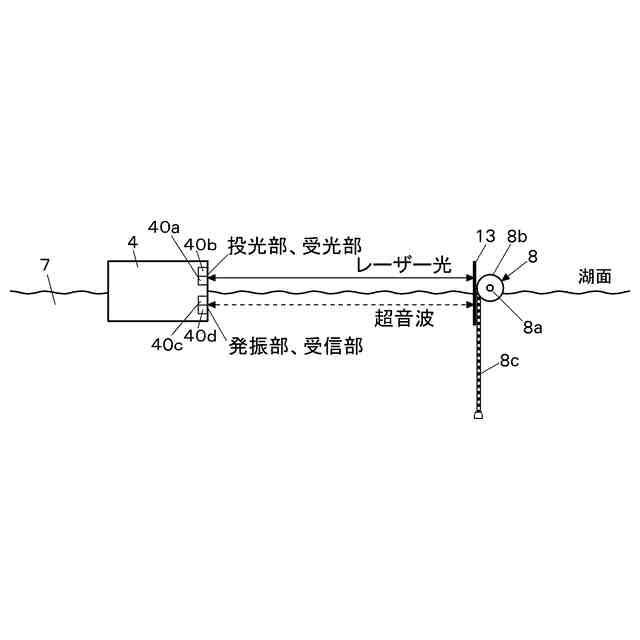
前記検出波は、湖面に沿って水面上に放出されたレーザー光と、湖面に沿って水中に放出された超音波と、からなることを特徴とする請求項1~3のいずれかに記載の塵芥滞留量把握システム。
【請求項5】
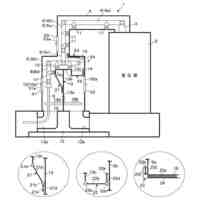
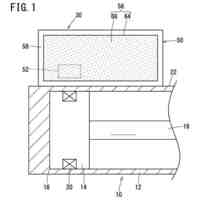
前記網場の上流側の上端側面に反射板を固定し、この反射板を、水面の上方から水中にかけて立設させると共に反射面を上流側に向けて配置し、また、前記網場に沿って連続的に、又は、所定の間隔で配置し、前記水上移動体から前記網場に向かって水平に放出される検出波を反射可能にしていることを特徴とする請求項1~3のいずれかに記載の塵芥滞留量把握システム。
【請求項6】
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握方法であって、
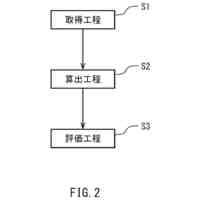
空中移動体によって前記探索エリアを上空から撮影した第1撮影画像を、前記探索エリアに塵芥が無い場合に前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と比較して得られた情報に基づき前記探索エリアに滞留する塵芥の占有率を算定する一次算定ステップと、
前記第1撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって前記探索エリアに滞留する塵芥の上流側境界を特定し、その上流側境界に基づき前記一次算定ステップによって算定された塵芥の占有率を修正する二次算定ステップと、
を具備することを特徴とする塵芥滞留量把握方法。
【請求項7】
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握方法であって、
水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって前記探索エリアに滞留する塵芥の上流側境界を特定し、その上流側境界に基づき前記探索エリアに滞留する塵芥の占有率を算定する一次算定ステップと、
前記水上移動体を前記網場に沿って湖面を移動させる時刻とほぼ同時刻において、空中移動体によって前記探索エリアを上空から撮影した第1撮影画像を、前記探索エリアに塵芥が無い場合に前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と比較して得られた情報に基づき前記一次算定ステップによって算定された塵芥の占有率を修正する二次算定ステップと
を具備することを特徴とする塵芥滞留量把握方法。
【請求項8】
湖面に設置された網場の上流側の所定の探索エリアに塵芥がある時点での空中移動体によって前記探索エリアを上空から撮影した第1撮影画像と、前記探索エリアに塵芥が無い時点での前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と、を格納する湖面画像データベースと、
前記第1撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって得られた前記探索エリアに滞留する塵芥の上流側境界のデータを格納する滞留塵芥上流側境界データベースと、
を用いて湖面の前記探索エリアに滞留する塵芥の滞留量を推定する塵芥滞留量把握方法であって、
空中移動体によって前記探索エリアを上空から撮影した推定用撮影画像と前記湖面画像データベースに格納された前記第2撮影画像とを比較して得られた比較データと、前記推定用撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって得られた前記探索エリアに滞留する塵芥の上流側境界のデータと、を含む推定用入力データを取得する入力データ取得ステップと、
前記湖面画像データベースに格納された前記第1撮影画像と前記第2撮影画像を比較して得られた比較データと、前記第1撮影画像の撮影時刻とほぼ同時刻において得られた前記滞留塵芥上流側境界データベースに格納された前記前記探索エリアに滞留する塵芥の上流側境界のデータと、を含む入力データと、前記第1撮影画像の撮影時刻とほぼ同時刻において前記探索エリアに滞留している塵芥を確認した際の塵芥の占有率を含む出力データと、の相関関係を機械学習させた学習モデルを用いて、前記入力データ取得ステップで取得した前記推定用入力データを前記学習モデルに入力して、前記湖面の前記探索エリアに滞留する塵芥の占有率を推定する塵芥占有率推定ステップと
を有することを特徴とする塵芥滞留量把握方法。
【請求項9】
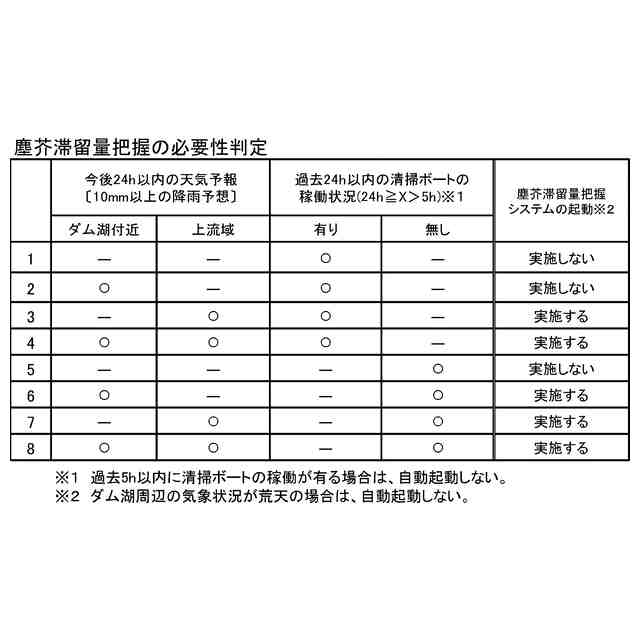
湖面付近、又は、湖面の上流側で所定時間内に降雨予想があり、且つ、少なくとも過去の所定時間内に塵芥の回収作業を行っていない場合に、各ステップの処理が実行されることを特徴とする請求項6~8のいずれかに記載の塵芥滞留量把握方法。
【請求項10】
前記探索エリアに滞留する塵芥の占有率が所定値以下であれば、塵芥の回収要請を行わず、所定値を超える場合に、前記塵芥の回収要請を行う塵芥回収要否判定ステップをさらに備えることを特徴とする請求項6~8のいずれかに記載の塵芥滞留量把握方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ダム湖等の湖面に滞留する塵芥の滞留量を正確に把握することが可能となる塵芥滞留量把握システム、塵芥滞留量把握方法及び塵芥滞留量把握プロブラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ダム湖においては、流入してくる流木などの湖面に浮遊する塵芥を遮断して、取水設備、発電設備、放水設備などの施設を保護するために、網場(ダムフェンス)が設けられている。この網場の上流側に滞留する塵芥は、ダム湖の取水の妨げとなるため、一定量が滞留すると撤去が必要となる。
【0003】
そこで、従来においては、塵芥の滞留具合をダムの保守員が目視点検によって判定し、塵芥の撤去の必要性が認められた場合には塵芥清掃用ボートを稼働させて塵芥の撤去作業を行うようにしていた。このため、塵芥の滞留状況により滞留した塵芥の撤去をタイムリーに実施できない場合が生じ、貯水池運用において問題が生じる虞があった。
【0004】
この点、従来においては、水面に滞留する塵芥を把握するために、水圏監視装置を設置し、水圏内の撮像手段で得られたアナルグ信号を波形解析して懸濁物質が存在するか否かを検出し、懸濁物質が検出された場合に画像処理によって懸濁物質の大きさ、形状、輝度に関する情報を求めたり、水面の色合いや水質等の水面計測情報を基に水質汚染度レベルを診断し、汚染度のレベルに対応して水圏を浄化する浄化手段を設けたりする技術や(特許文献1)、水面にレーザー光の水面に放出する位置を変化させて、反射光量により油膜を検出する装置(特許文献2)等が公知となっている。
【先行技術文献】
【特許文献】
【0005】
特開平5-332915号公報
特開2003-149146号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前者においては、
(1)ダム湖面の水の色度や水質は、上流の天候(降雨時や晴天時)および季節的な変動等によって一定ではないため、水面の色度や水質によって一律にダム湖面の浮遊物を判断することは難しい。
(2)また、水面計測情報の一つに、浮遊物質集積度もあるが、実現にあたっては、広大なダム湖ではいくつもの計測点を設ける必要があり、精度の高い観測結果を得るためには、多数の計測装置の設置が必要となり、また、計測装置の設置場所の選定を適切に行う必要がある。
(3)さらに、濁水湖面の場合は、水面直下に浮遊する塵芥の検出は難しくなる。
【0007】
また、後者においては、
レーザー光の発光および受光機能等を搭載する検出装置や昇降装置を固定する架台を陸上へ設置する必要があるためダム湖のような広大な範囲を検出対象とすることは難しい。
また、検出装置が常に水面と一定距離を保つように上下移動させる構造により、レーザー光の水面からの反射光は、必ず受光手段に受光される仕組みである。この技術は、水面変動に関係なく一定条件下での測定が可能であり、検出精度を高めることは可能となるが、レーザー光は、水面の決まった範囲に放出する前提であるため測定範囲は狭くなる。
また、この技術においても、原理上、油膜の検出は可能になるものの、水面直下に浮遊する塵芥の検出は難しい。
【0008】
本発明は係る事情に鑑みてなされたものであり、湖面上に滞留する塵芥の滞留量を正確に把握して、適時に滞留している塵芥を回収することが可能な塵芥滞留量把握システム、塵芥滞留量把握方法及び塵芥滞留量把握プロブラムを提供することを主たる課題としている。
【課題を解決するための手段】
【0009】
上記課題を達成するために、本発明に係る塵芥滞留量把握システムは、
湖面に設置された網場の上流側の所定の探索エリアに滞留する塵芥の滞留量を把握する塵芥滞留量把握システムであって、
空中移動体によって前記探索エリアを上空から撮影した第1撮影画像を、前記探索エリアに塵芥が無い場合に前記空中移動体によって前記探索エリアを上空から撮影した第2撮影画像と比較して得られた情報に基づき前記探索エリアに滞留する塵芥の占有率を算定する一次算定手段と、
前記第1撮影画像の撮影時刻とほぼ同時刻において水上移動体を湖面の網場の上流側で前記網場に沿って移動させ、その移動させる過程において前記水上移動体から網場に向かって水平に放出する検出波の反射波が戻るまでの時間を連続的又は断続的に測定することによって前記探索エリアに滞留する塵芥の上流側境界を特定し、その上流側境界に基づき前記一次算定手段によって算定された塵芥の占有率を修正する二次算定手段と、
を具備することを特徴としている。
【0010】
したがって、一次算定手段により、空中移動体によって探索エリアを上空から撮影した第1撮影画像を、探索エリアに塵芥が無い場合に空中移動体によって探索エリアを上空から撮影した第2撮影画像と比較して、探索エリアに滞留する塵芥の占有率が一時的に算定される。すなわち、湖面の探索エリアにおいて、第1撮影画像と第2撮影画像の比較において、第2撮影画面に写っていない塵芥の存在が認められる場合や第2撮影画像とは色合いの異なる範囲が認められる場合等に、その異なる部分の領域に何かしらの塵芥が存在しているとしてその領域の探索エリアで占める割合を一次的に算定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
中国電力株式会社
移動用変圧器
2日前
中国電力株式会社
品質判定方法
16日前
中国電力株式会社
油流出防止構造
1日前
中国電力株式会社
危険予知訓練装置
8日前
中国電力株式会社
通信部仮保持構造
15日前
中国電力株式会社
利用設備最適化システム
1日前
中国電力株式会社
変圧器用ケーブルダクト
1日前
中国電力株式会社
捜索システム及び捜索方法
10日前
中国電力株式会社
スマートメータ監視システム
1日前
中国電力株式会社
情報処理装置、情報処理方法、及びプログラム
10日前
中国電力株式会社
チェックターミナル端子構造及びチェックターミナル
今日
中国電力株式会社
塵芥滞留量把握システム、塵芥滞留量把握方法及び塵芥滞留量把握プロブラム
7日前
日本精機株式会社
表示装置
17日前
大和製衡株式会社
組合せ秤
1日前
有限会社原製作所
検出回路
15日前
日本無線株式会社
レーダ装置
16日前
個人
フロートレス液面センサー
8日前
株式会社リコー
光学機器
15日前
ダイハツ工業株式会社
試験用治具
1日前
日本精機株式会社
二酸化炭素濃度測定器
22日前
キヤノン株式会社
放射線撮像装置
10日前
大和製衡株式会社
組合せ計量装置
17日前
日本特殊陶業株式会社
ガスセンサ
7日前
株式会社クボタ
作業車
今日
大同特殊鋼株式会社
座標系較正方法
10日前
旭光電機株式会社
漏出検出装置
7日前
株式会社フジキン
流量測定装置
2日前
大同特殊鋼株式会社
ラベル色特定方法
10日前
NISSHA株式会社
ガス検出器
20日前
スズキ株式会社
ECU交換診断システム
21日前
住友化学株式会社
積層基板
7日前
キヤノン株式会社
光学装置
21日前
株式会社アステックス
ラック型負荷装置
8日前
トヨタ自動車株式会社
異音判定装置
9日前
日本製鉄株式会社
評価方法
8日前
SMC株式会社
位置検出センサ
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ