TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096942
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023212953
出願日
2023-12-18
発明の名称
学習方法及び学習装置
出願人
マクセル株式会社
代理人
個人
,
個人
,
個人
主分類
G06N
3/0495 20230101AFI20250623BHJP(計算;計数)
要約
【課題】機能モデルによる演算結果とニューラルネットワーク回路による演算結果との誤差を低減する。
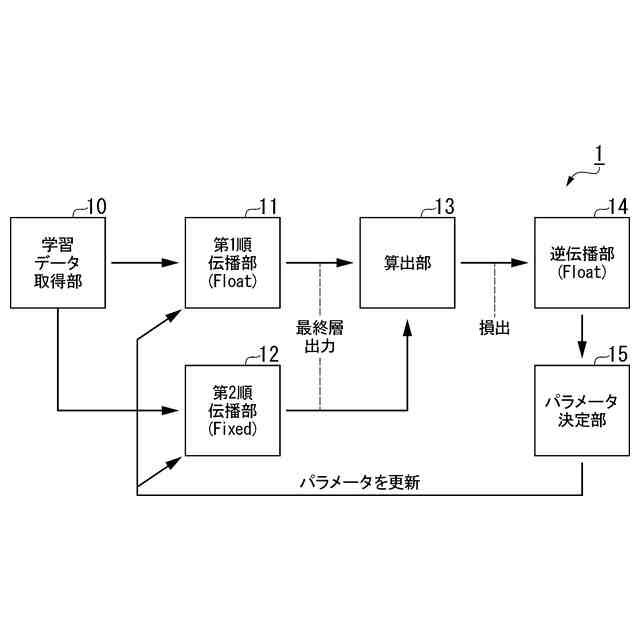
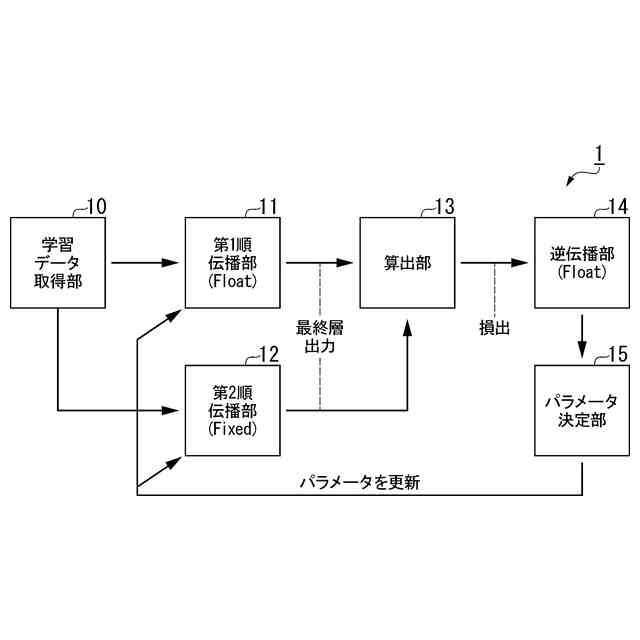
【解決手段】学習装置は、学習データを取得する学習データ取得部と、前記学習データ取得部により取得された情報を、学習対象のニューラルネットワークを順伝播させることにより、損失を得る第1順伝播部と、前記第1順伝播部に基づいて生成され、前記第1順伝播部の演算ビット数より小さいビット数で演算を行うことにより損失を得る第2順伝播部と、前記第1順伝播部により得られた損失と、前記第2順伝播部により得られた損失との差を算出する算出部と、前記算出部により算出された差を加算し、前記ニューラルネットワークを逆伝播させる逆伝播部と、前記逆伝播部により行われた逆伝播の結果として損失が減るように前記ニューラルネットワークのパラメータを決定するパラメータ決定部とを備える。
【選択図】図7
特許請求の範囲
【請求項1】
学習データを取得する学習データ取得部と、
前記学習データ取得部により取得された情報を、学習対象のニューラルネットワークを順伝播させることにより、損失を得る第1順伝播部と、
前記第1順伝播部に基づいて生成され、前記第1順伝播部の演算ビット数より小さいビット数で演算を行うことにより損失を得る第2順伝播部と、
前記第1順伝播部により得られた損失と、前記第2順伝播部により得られた損失とから閾値を算出する算出部と、
前記算出部により算出された前記閾値を加算し、前記ニューラルネットワークを逆伝播させる逆伝播部と、
前記逆伝播部により行われた逆伝播の結果として損失が減るように前記ニューラルネットワークのパラメータを決定するパラメータ決定部と、
を備える学習装置。
続きを表示(約 830 文字)
【請求項2】
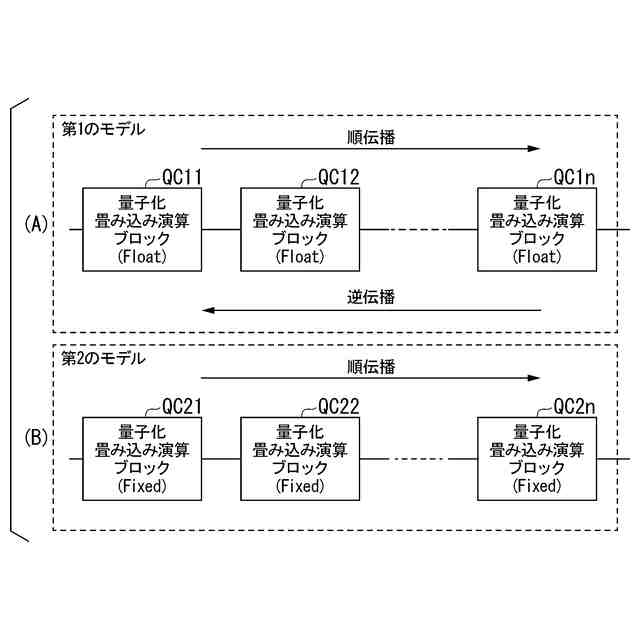
前記第1順伝播部の演算順序と、前記第2順伝播部の演算順序とは、互いに異なる、
請求項1に記載の学習装置。
【請求項3】
前記パラメータ決定部により決定されたパラメータは、アクセラレータに実装されるものであって、
前記第2順伝播部の演算順序は、実装されるアクセラレータに応じて異なる、
請求項2に記載の学習装置。
【請求項4】
前記パラメータ決定部により決定されたパラメータは、アクセラレータに実装されるものであって、
前記第2順伝播部の演算式は、実装されるアクセラレータに応じて異なるものである、
請求項1に記載の学習装置。
【請求項5】
実装されるアクセラレータに応じた演算式が予め用意されており、
前記第2順伝播部の演算式は、実装されるアクセラレータに応じて選択される、
請求項4に記載の学習装置。
【請求項6】
学習データを取得する学習データ取得工程と、
前記学習データ取得工程において取得された情報を、学習対象のニューラルネットワークを順伝播させることにより、損失を得る第1順伝播工程と、
前記第1順伝播工程において用いられる第1モデルに基づいて生成された第2モデルを用いて損失を得る工程であって、前記第2モデルの演算ビット数は、前記第1モデルの演算ビット数より小さい第2順伝播工程と、
前記第1順伝播工程において得られた損失と、前記第2順伝播工程において得られた損失とから閾値を算出する算出工程と、
前記算出工程により算出された前記閾値を加算し、前記ニューラルネットワークを逆伝播させる逆伝播工程と、
前記逆伝播工程により行われた逆伝播の結果として損失が減るように前記ニューラルネットワークのパラメータを決定するパラメータ決定工程と、
を有する学習方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習方法及び学習装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、画像の中から何らかのパターンを認識するための方法として、畳み込みニューラルネットワーク(Convolutional Neural Network:CNN)が知られている。IoT機器等の組み込み機器においては、エッジデバイスに対して組み込み可能な、軽量なニューラルネットワーク回路が用いられている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6896306号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方、畳み込みニューラルネットワークの構成や仕様を決定して、畳み込みニューラルネットワークの機能モデルを生成し、当該機能モデルを用いて学習した学習済みパラメータを生成するために、公知のライブラリやプラットホームが利用されている。このようなライブラリやプラットホームにおいて生成されたニューラルネットワークの機能モデルや学習済みパラメータを、軽量なニューラルネットワーク回路において実施可能な演算に変換して演算させる場合、演算精度やデータフォーマットの違いにより、演算結果に誤差が生じる場合があった。
【0005】
このような事情を踏まえ、本発明は、ニューラルネットワークの機能モデルと当該機能モデルを用いて学習した学習済みパラメータを、ニューラルネットワーク回路において実施可能な演算に変換して演算させる場合、機能モデルによる演算結果とニューラルネットワーク回路による演算結果とに誤差が発生しにくい学習装置及び学習方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
[1]上記の課題を解決するため、本発明の一態様は、学習データを取得する学習データ取得部と、前記学習データ取得部により取得された情報を、学習対象のニューラルネットワークを順伝播させることにより、損失を得る第1順伝播部と、前記第1順伝播部に基づいて生成され、前記第1順伝播部の演算ビット数より小さいビット数で演算を行うことにより損失を得る第2順伝播部と、前記第1順伝播部により得られた損失と、前記第2順伝播部により得られた損失とから閾値を算出する算出部と、前記算出部により算出された前記閾値を加算し、前記ニューラルネットワークを逆伝播させる逆伝播部と、前記逆伝播部により行われた逆伝播の結果として損失が減るように前記ニューラルネットワークのパラメータを決定するパラメータ決定部とを備える学習装置である。
【0007】
[2]また、本発明の一態様は、上記[1]に記載の学習装置において、前記第1順伝播部の演算順序と、前記第2順伝播部の演算順序とは、互いに異なるものである。
【0008】
[3]また、本発明の一態様は、上記[2]に記載の学習装置であって、前記パラメータ決定部により決定されたパラメータは、アクセラレータに実装されるものであって、前記第2順伝播部の演算順序は、実装されるアクセラレータに応じて異なるものである。
【0009】
[4]また、本発明の一態様は、上記[1]に記載の学習装置であって、前記パラメータ決定部により決定されたパラメータは、アクセラレータに実装されるものであって、前記第2順伝播部の演算式は、実装されるアクセラレータに応じて異なるものである。
【0010】
[5]また、本発明の一態様は、上記[4]に記載の学習装置であって、実装されるアクセラレータに応じた演算式が予め用意されており、前記第2順伝播部の演算式は、実装されるアクセラレータに応じて選択されるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
マクセル株式会社
全固体電池及び全固体電池の製造方法
2日前
マクセル株式会社
表示装置
1日前
マクセル株式会社
撮像レンズ系、カメラモジュール、車載システム、移動体
1日前
マクセル株式会社
情報処理装置
1日前
マクセル株式会社
アプリケーション起動方法
1日前
マクセル株式会社
ロールアセンブリ、ロールアセンブリの製造方法、ロールアセンブリの保管・輸送方法、および梱包体
3日前
マクセル株式会社
レンズユニット、カメラモジュール、撮像システムおよび移動体
1日前
マクセル株式会社
情報処理装置、画像表示装置、撮影画像転送表示システム、及び撮影画像転送表示方法
3日前
個人
対話装置
22日前
個人
物品給付年金
1か月前
個人
政治のAI化
1か月前
個人
情報処理装置
22日前
個人
記入設定プラグイン
10日前
個人
情報処理装置
18日前
個人
プラグインホームページ
1か月前
個人
不動産売買システム
2日前
個人
情報入力装置
22日前
個人
物価スライド機能付生命保険
22日前
個人
マイホーム非電子入札システム
22日前
株式会社BONNOU
管理装置
15日前
個人
全アルゴリズム対応型プログラム
1か月前
キヤノン株式会社
画像処理装置
1か月前
ホシデン株式会社
タッチ入力装置
2日前
個人
決済手数料0%のクレジットカード
25日前
大同特殊鋼株式会社
輝線検出方法
1か月前
株式会社東芝
電子機器
3日前
シャープ株式会社
電子機器
1か月前
サクサ株式会社
カードの制動構造
24日前
株式会社ワコム
電子消去具
2日前
個人
パターン抽出方法及び通信多重化方法
1日前
パテントフレア株式会社
交差型バーコード
1か月前
トヨタ自動車株式会社
欠け検査装置
1か月前
株式会社アジラ
データ転送システム
1か月前
株式会社ライト
情報処理装置
15日前
村田機械株式会社
割当補助システム
28日前
トヨタ自動車株式会社
情報処理装置
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ